 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Nonvolatile Switchable-polarity EPM Valve
Mar 25, 2026Scalable control of pneumatic and fluidic networks remains fundamentally constrained by architectures that require continuous power input, dense external control hardware, and fixed routing topologies. Current valve arrays rely on such continuous actuation and mechanically fixed routing, imposing substantial thermal and architectural overhead. Here, we introduce the Switchable-polarity ElectroPermanent Magnet (S-EPM), a fundamentally new bistable magnetic architecture that deterministically reverses its external magnetic polarity through transient electrical excitation. By reconfiguring internal flux pathways within a composite magnet assembly, the S-EPM establishes two stable, opposing magnetic configurations without requiring sustained power. We integrate this architecture into a compact pinch-valve to robustly control pneumatic and liquid media. This state-encoded magnetic control enables logic-embedded fluidic networks, including decoders, hierarchical distribution modules, and a nonvolatile six-port routing array. These systems provide address-based routing and programmable compositional control, offering features like individual port isolation that are impossible with standard mechanically coupled rotary valves. By embedding functionality in persistent magnetic states rather than continuous power or static plumbing, this work establishes a scalable foundation for digital fluidics and autonomous laboratory platforms.
Closed-Loop Control and Disturbance Mitigation of an Underwater Multi-Segment Continuum Manipulator
Mar 16, 2025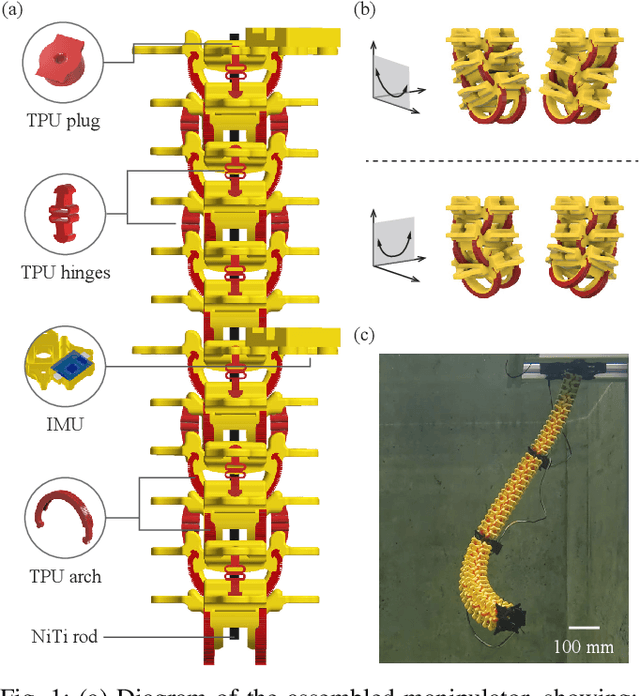
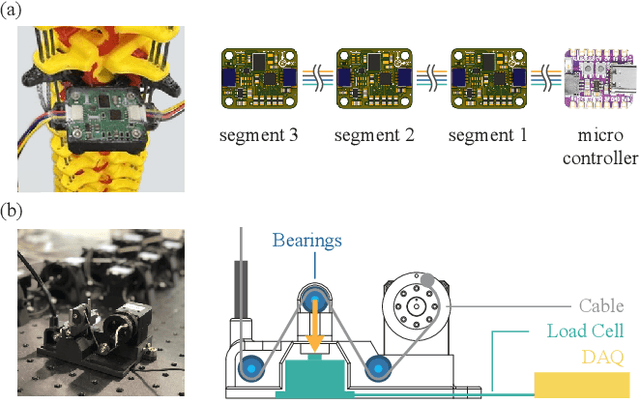
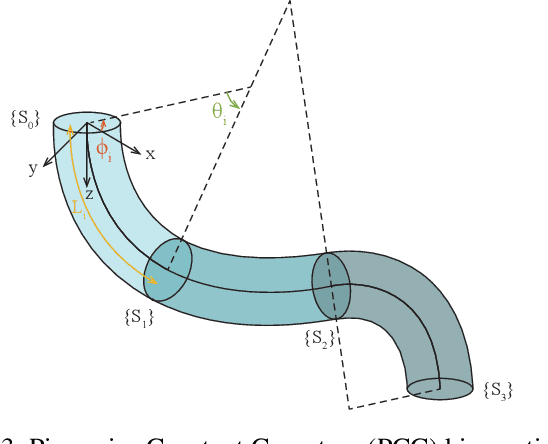
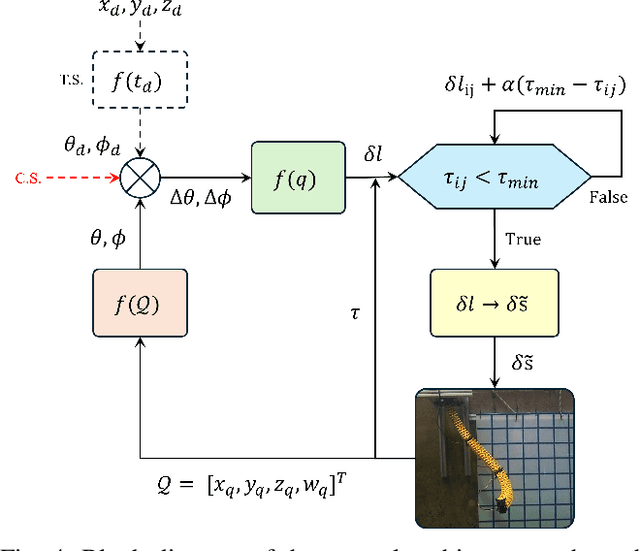
The use of soft and compliant manipulators in marine environments represents a promising paradigm shift for subsea inspection, with devices better suited to tasks owing to their ability to safely conform to items during contact. However, limitations driven by material characteristics often restrict the reach of such devices, with the complexity of obtaining state estimations making control non-trivial. Here, a detailed analysis of a 1m long compliant manipulator prototype for subsea inspection tasks is presented, including its mechanical design, state estimation technique, closed-loop control strategies, and experimental performance evaluation in underwater conditions. Results indicate that both the configuration-space and task-space controllers implemented are capable of positioning the end effector to desired locations, with deviations of <5% of the manipulator length spatially and to within 5^{o} of the desired configuration angles. The manipulator was also tested when subjected to various disturbances, such as loads of up to 300g and random point disturbances, and was proven to be able to limit displacement and restore the desired configuration. This work is a significant step towards the implementation of compliant manipulators in real-world subsea environments, proving their potential as an alternative to classical rigid-link designs.
A Modular, Tendon Driven Variable Stiffness Manipulator with Internal Routing for Improved Stability and Increased Payload Capacity
May 03, 2024



Stability and reliable operation under a spectrum of environmental conditions is still an open challenge for soft and continuum style manipulators. The inability to carry sufficient load and effectively reject external disturbances are two drawbacks which limit the scale of continuum designs, preventing widespread adoption of this technology. To tackle these problems, this work details the design and experimental testing of a modular, tendon driven bead-style continuum manipulator with tunable stiffness. By embedding the ability to independently control the stiffness of distinct sections of the structure, the manipulator can regulate it's posture under greater loads of up to 1kg at the end-effector, with reference to the flexible state. Likewise, an internal routing scheme vastly improves the stability of the proximal segment when operating the distal segment, reducing deviations by at least 70.11%. Operation is validated when gravity is both tangential and perpendicular to the manipulator backbone, a feature uncommon in previous designs. The findings presented in this work are key to the development of larger scale continuum designs, demonstrating that flexibility and tip stability under loading can co-exist without compromise.
Fluidic FlowBots: Intelligence embodied in the characteristics of recirculating fluid flow
Dec 08, 2023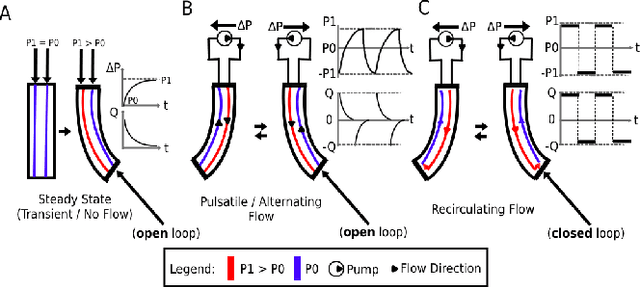
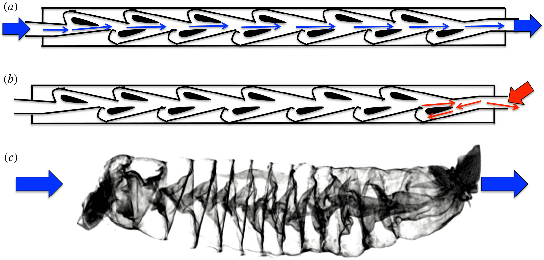
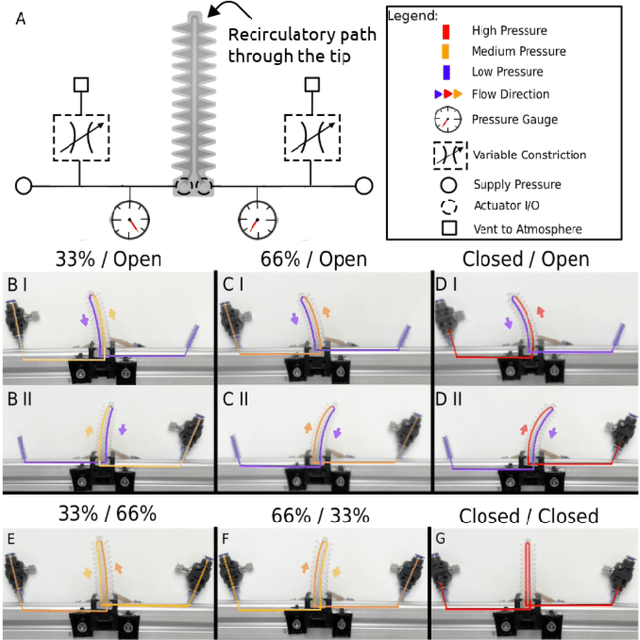
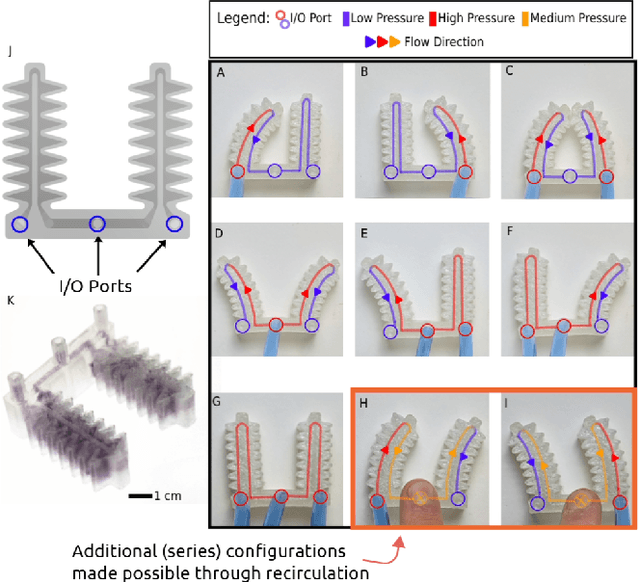
The one-to-one mapping of control inputs to actuator outputs results in elaborate routing architectures that limit how complex fluidic soft robot behaviours can currently become. Embodied intelligence can be used as a tool to counteract this phenomenon. Control functionality can be embedded directly into actuators by leveraging the characteristics of fluid flow phenomena. Whilst prior soft robotics work has focused exclusively on actuators operating in a state of transient/no flow (constant pressure), or pulsatile/alternating flow, our work begins to explore the possibilities granted by operating in the closed-loop flow recirculation regime. Here we introduce the concept of FlowBots: soft robots that utilise the characteristics of continuous fluid flow to enable the embodiment of complex control functionality directly into the structure of the robot. FlowBots have robust, integrated, no-moving-part control systems, and these architectures enable: monolithic additive manufacturing methods, rapid prototyping, greater sustainability, and an expansive range of applications. Based on three FlowBot examples: a bidirectional actuator, a gripper, and a quadruped swimmer - we demonstrate how the characteristics of flow recirculation contribute to simplifications in fluidic analogue control architectures. We conclude by outlining our design and rapid prototyping methodology to empower others in the field to explore this new, emerging design field, and design their own FlowBots.
Feed-forward Disturbance Compensation for Station Keeping in Wave-dominated Environments
Apr 11, 2023When deploying robots in shallow ocean waters, wave disturbances can be significant, highly dynamic and pose problems when operating near structures; this is a key limitation of current control strategies, restricting the range of conditions in which subsea vehicles can be deployed. To improve dynamic control and offer a higher level of robustness, this work proposes a Cascaded Proportional-Derivative (C-PD) with Feed-forward (FF) control scheme for disturbance mitigation, exploring the concept of explicitly using disturbance estimations to counteract state perturbations. Results demonstrate that the proposed controller is capable of higher performance in contrast to a standard C-PD controller, with an average reduction of ~48% witnessed across various sea states. Additional analysis also investigated performance when considering coarse estimations featuring inaccuracies; average improvements of ~17% demonstrate the effectiveness of the proposed strategy to handle these uncertainties. The proposal in this work shows promise for improved control without a drastic increase in required computing power; if coupled with sufficient sensors, state estimation techniques and prediction algorithms, utilising feed-forward compensating control actions offers a potential solution to improve vehicle control under wave-induced disturbances.
The Soft Compiler: A Web-Based Tool for the Design of Modular Pneumatic Circuits for Soft Robots
Feb 08, 2022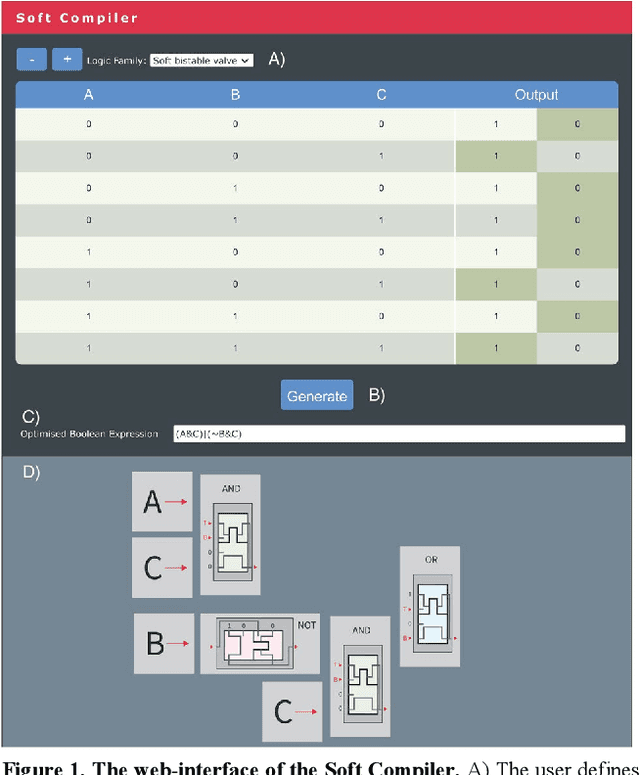
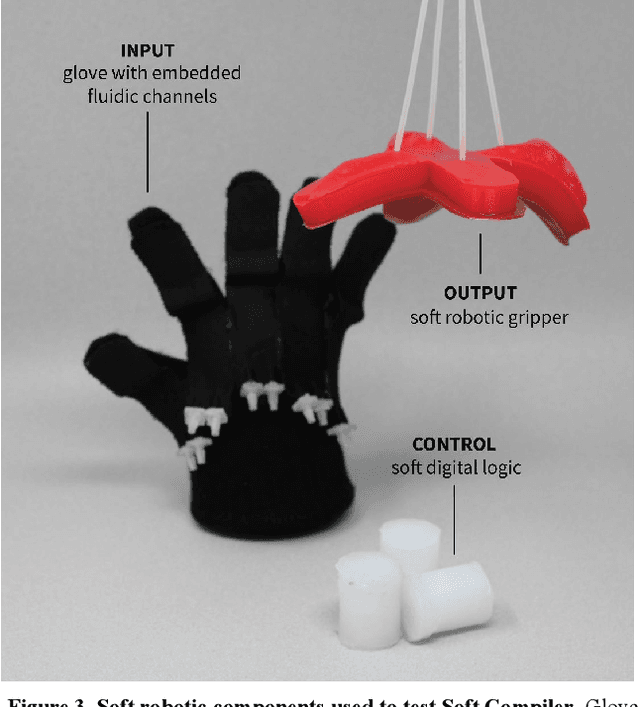
Developing soft circuits from individual soft logic gates poses a unique challenge: with increasing numbers of logic gates, the design and implementation of circuits leads to inefficiencies due to mathematically unoptimized circuits and wiring mistakes during assembly. It is therefore practically important to introduce design tools that support the development of soft circuits. We developed a web-based graphical user interface, the Soft Compiler, that accepts a user-defined robot behavior as a truth table to generate a mathematically optimized circuit diagram that guides the assembly of a soft fluidic circuit. We describe the design and experimental verification of three soft circuits of increasing complexity, using the Soft Compiler as a design tool and a novel pneumatic glove as an input interface. In one example, we reduce the size of a soft circuit from the original 11 logic gates to 4 logic gates while maintaining circuit functionality. The Soft Compiler is a web-based design tool for fluidic, soft circuits and published under open-source MIT License.
Soft Robots for Extreme Environments: Removing Electronic Control
Mar 26, 2019

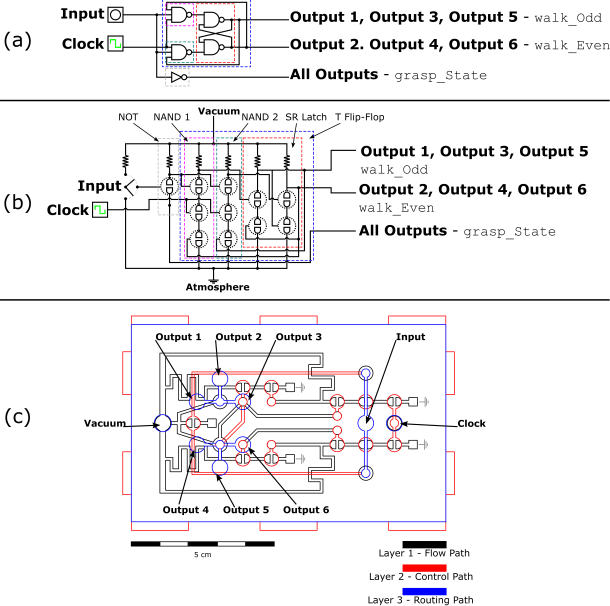

The ignition of flammable liquids and gases in offshore oil and gas environments is a major risk and can cause loss of life, serious injury, and significant damage to infrastructure. Power supplies that are used to provide regulated voltages to drive motors, relays, and power electronic controls can produce heat and cause sparks. As a result, the European Union requires ATEX certification on electrical equipment to ensure safety in such extreme environments. Implementing designs that meet this standard is time-consuming and adds to the cost of operations. Soft robots are often made with soft materials and can be actuated pneumatically, without electronics, making these systems inherently compliant with this directive. In this paper, we aim to increase the capability of new soft robotic systems moving from a one-to-one control-actuator architecture and implementing an electronics-free control system. We have developed a robot that demonstrates locomotion and gripping using three-pneumatic lines: a vacuum power line, a control input, and a clock line. We have followed the design principles of digital electronics and demonstrated an integrated fluidic circuit with eleven, fully integrated fluidic switches and six actuators. We have realized the basic building blocks of logical operation into combinational logic and memory using our fluidic switches to create a two-state automata machine. This system expands on the state of the art increasing the complexity over existing soft systems with integrated control.
Integrating Soft Robotics with ROS - A hybrid pick and place arm
Feb 02, 2017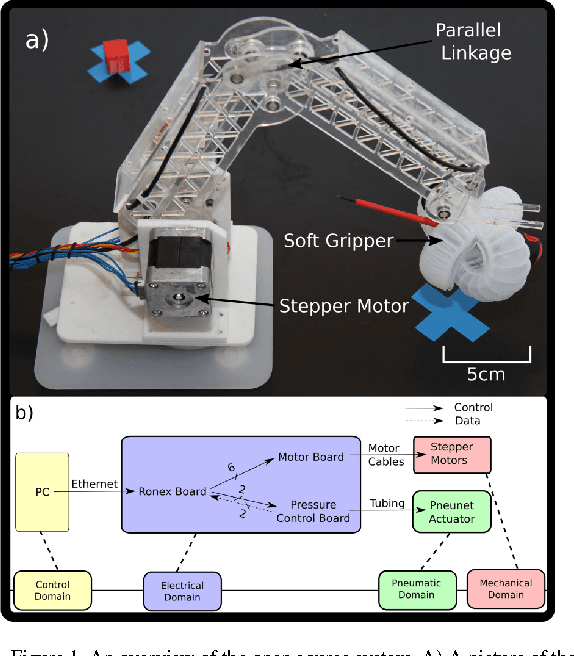
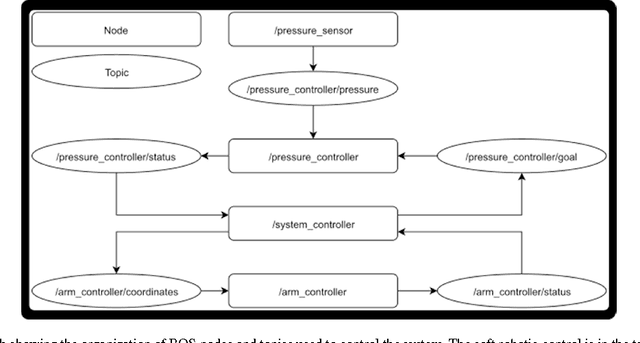


Soft robotic systems present a variety of new opportunities for solving complex problems. The use of soft robotic grippers, for example, can simplify the complexity in tasks such as the of grasping irregular and delicate objects. Adoption of soft robotics by academia and industry, however, has been slow and this is, in-part, due to the amount of hardware and software that must be developed from scratch for each use of soft system components. In this paper we detail the design, fabrication and validation of an open-source framework that we designed to lower the barrier to entry for integrating soft robotic subsystems. This framework is built on ROS (the Robot Operating System) and we use it to demonstrate a modular, soft-hard hybrid system which is capable of completing pick and place tasks. By lowering this barrier to entry we hope that system designers and researchers will find it easy to integrate soft components into their existing ROS-enabled robotic systems.