 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComputing forward statics from tendon-length in flexible-joint hyper-redundant manipulators
Sep 15, 2025Hyper-redundant tendon-driven manipulators offer greater flexibility and compliance over traditional manipulators. A common way of controlling such manipulators relies on adjusting tendon lengths, which is an accessible control parameter. This approach works well when the kinematic configuration is representative of the real operational conditions. However, when dealing with manipulators of larger size subject to gravity, it becomes necessary to solve a static force problem, using tendon force as the input and employing a mapping from the configuration space to retrieve tendon length. Alternatively, measurements of the manipulator posture can be used to iteratively adjust tendon lengths to achieve a desired posture. Hence, either tension measurement or state estimation of the manipulator are required, both of which are not always accurately available. Here, we propose a solution by reconciling cables tension and length as the input for the solution of the system forward statics. We develop a screw-based formulation for a tendon-driven, multi-segment, hyper-redundant manipulator with elastic joints and introduce a forward statics iterative solution method that equivalently makes use of either tendon length or tension as the input. This strategy is experimentally validated using a traditional tension input first, subsequently showing the efficacy of the method when exclusively tendon lengths are used. The results confirm the possibility to perform open-loop control in static conditions using a kinematic input only, thus bypassing some of the practical problems with tension measurement and state estimation of hyper-redundant systems.
Closed-Loop Control and Disturbance Mitigation of an Underwater Multi-Segment Continuum Manipulator
Mar 16, 2025The use of soft and compliant manipulators in marine environments represents a promising paradigm shift for subsea inspection, with devices better suited to tasks owing to their ability to safely conform to items during contact. However, limitations driven by material characteristics often restrict the reach of such devices, with the complexity of obtaining state estimations making control non-trivial. Here, a detailed analysis of a 1m long compliant manipulator prototype for subsea inspection tasks is presented, including its mechanical design, state estimation technique, closed-loop control strategies, and experimental performance evaluation in underwater conditions. Results indicate that both the configuration-space and task-space controllers implemented are capable of positioning the end effector to desired locations, with deviations of <5% of the manipulator length spatially and to within 5^{o} of the desired configuration angles. The manipulator was also tested when subjected to various disturbances, such as loads of up to 300g and random point disturbances, and was proven to be able to limit displacement and restore the desired configuration. This work is a significant step towards the implementation of compliant manipulators in real-world subsea environments, proving their potential as an alternative to classical rigid-link designs.
A Modular, Tendon Driven Variable Stiffness Manipulator with Internal Routing for Improved Stability and Increased Payload Capacity
May 03, 2024



Stability and reliable operation under a spectrum of environmental conditions is still an open challenge for soft and continuum style manipulators. The inability to carry sufficient load and effectively reject external disturbances are two drawbacks which limit the scale of continuum designs, preventing widespread adoption of this technology. To tackle these problems, this work details the design and experimental testing of a modular, tendon driven bead-style continuum manipulator with tunable stiffness. By embedding the ability to independently control the stiffness of distinct sections of the structure, the manipulator can regulate it's posture under greater loads of up to 1kg at the end-effector, with reference to the flexible state. Likewise, an internal routing scheme vastly improves the stability of the proximal segment when operating the distal segment, reducing deviations by at least 70.11%. Operation is validated when gravity is both tangential and perpendicular to the manipulator backbone, a feature uncommon in previous designs. The findings presented in this work are key to the development of larger scale continuum designs, demonstrating that flexibility and tip stability under loading can co-exist without compromise.
Model Predictive Wave Disturbance Rejection for Underwater Soft Robotic Manipulators
Jan 24, 2024



Inspired by the octopus and other animals living in water, soft robots should naturally lend themselves to underwater operations, as supported by encouraging validations in deep water scenarios. This work deals with equipping soft arms with the intelligence necessary to move precisely in wave-dominated environments, such as shallow waters where marine renewable devices are located. This scenario is substantially more challenging than calm deep water since, at low operational depths, hydrodynamic wave disturbances can represent a significant impediment. We propose a control strategy based on Nonlinear Model Predictive Control that can account for wave disturbances explicitly, optimising control actions by considering an estimate of oncoming hydrodynamic loads. The proposed strategy is validated through a set of tasks covering set-point regulation, trajectory tracking and mechanical failure compensation, all under a broad range of varying significant wave heights and peak spectral periods. The proposed control methodology displays positional error reductions as large as 84% with respect to a baseline controller, proving the effectiveness of the method. These initial findings present a first step in the development and deployment of soft manipulators for performing tasks in hazardous water environments.
Disturbance Preview for Nonlinear Model Predictive Trajectory Tracking of Underwater Vehicles in Wave Dominated Environments
Jul 27, 2023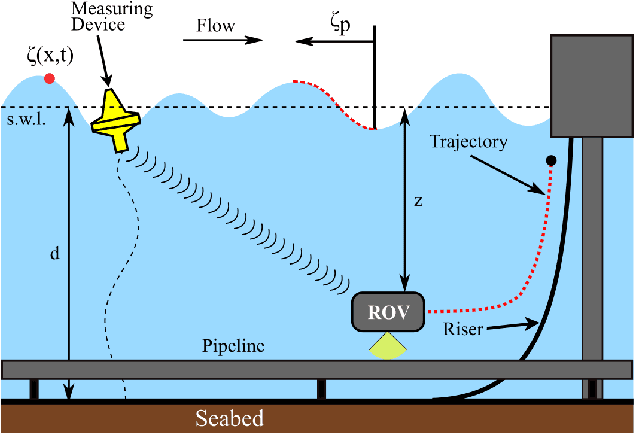
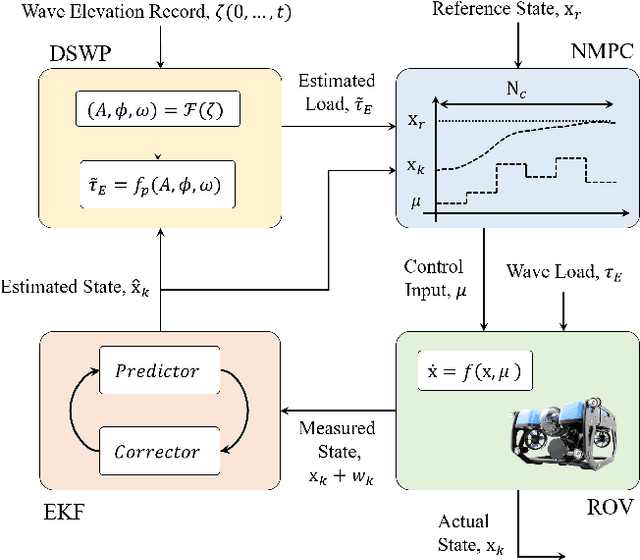
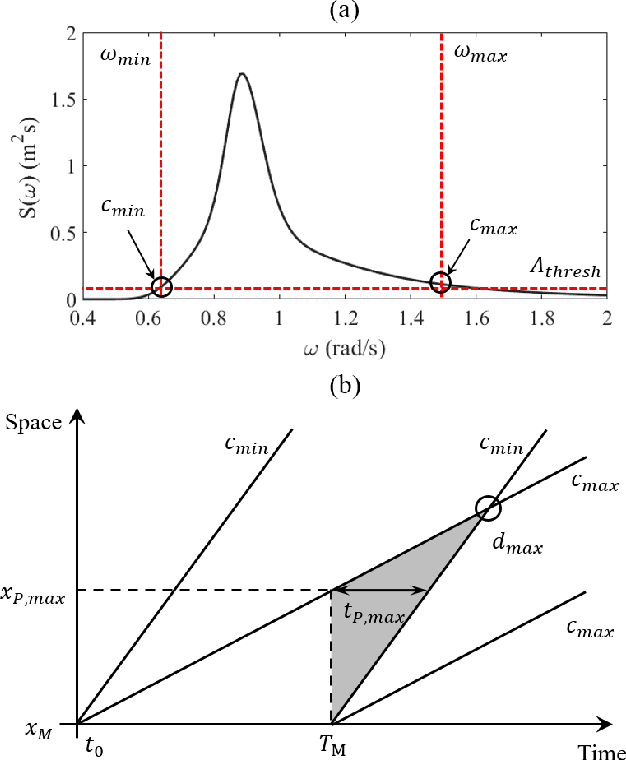
Operating in the near-vicinity of marine energy devices poses significant challenges to the control of underwater vehicles, predominantly due to the presence of large magnitude wave disturbances causing hazardous state perturbations. Approaches to tackle this problem have varied, but one promising solution is to adopt predictive control methods. Given the predictable nature of ocean waves, the potential exists to incorporate disturbance estimations directly within the plant model; this requires inclusion of a wave predictor to provide online preview information. To this end, this paper presents a Nonlinear Model Predictive Controller with an integrated Deterministic Sea Wave Predictor for trajectory tracking of underwater vehicles. State information is obtained through an Extended Kalman Filter, forming a complete closed-loop strategy and facilitating online wave load estimations. The strategy is compared to a similar feed-forward disturbance mitigation scheme, showing mean performance improvements of 51% in positional error and 44.5% in attitude error. The preliminary results presented here provide strong evidence of the proposed method's high potential to effectively mitigate disturbances, facilitating accurate tracking performance even in the presence of high wave loading.
Feed-forward Disturbance Compensation for Station Keeping in Wave-dominated Environments
Apr 11, 2023When deploying robots in shallow ocean waters, wave disturbances can be significant, highly dynamic and pose problems when operating near structures; this is a key limitation of current control strategies, restricting the range of conditions in which subsea vehicles can be deployed. To improve dynamic control and offer a higher level of robustness, this work proposes a Cascaded Proportional-Derivative (C-PD) with Feed-forward (FF) control scheme for disturbance mitigation, exploring the concept of explicitly using disturbance estimations to counteract state perturbations. Results demonstrate that the proposed controller is capable of higher performance in contrast to a standard C-PD controller, with an average reduction of ~48% witnessed across various sea states. Additional analysis also investigated performance when considering coarse estimations featuring inaccuracies; average improvements of ~17% demonstrate the effectiveness of the proposed strategy to handle these uncertainties. The proposal in this work shows promise for improved control without a drastic increase in required computing power; if coupled with sufficient sensors, state estimation techniques and prediction algorithms, utilising feed-forward compensating control actions offers a potential solution to improve vehicle control under wave-induced disturbances.