 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTube-Balloon Logic for the Exploration of Fluidic Control Elements
Feb 08, 2022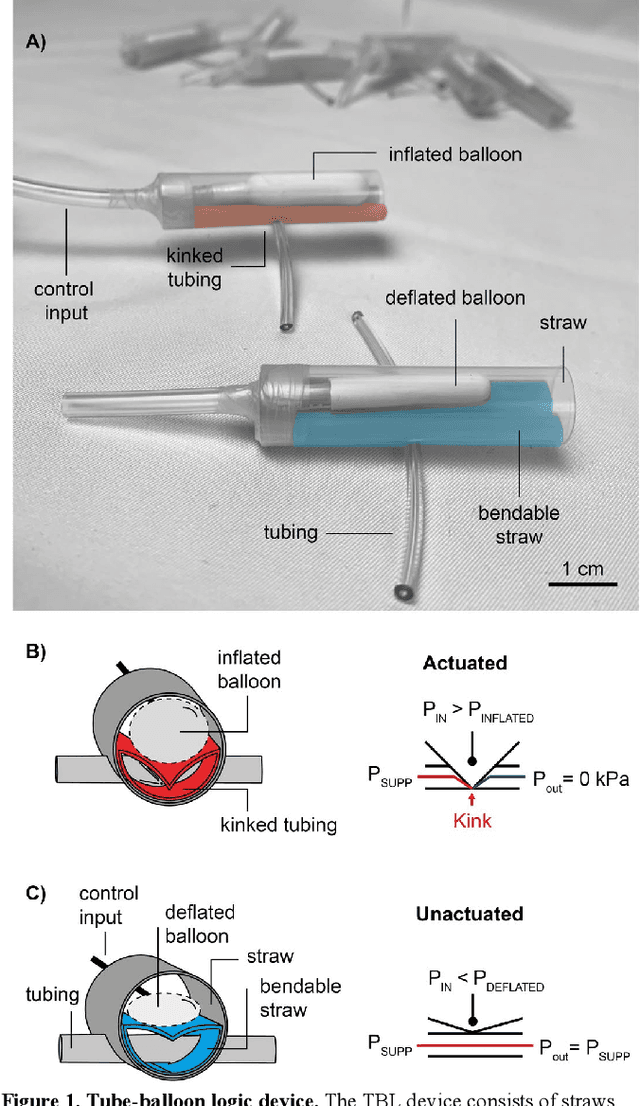
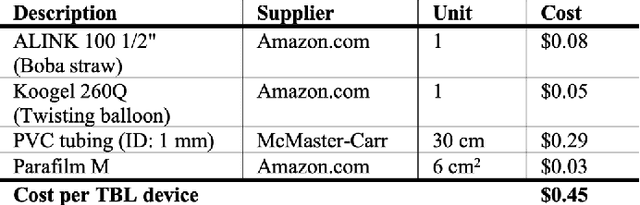
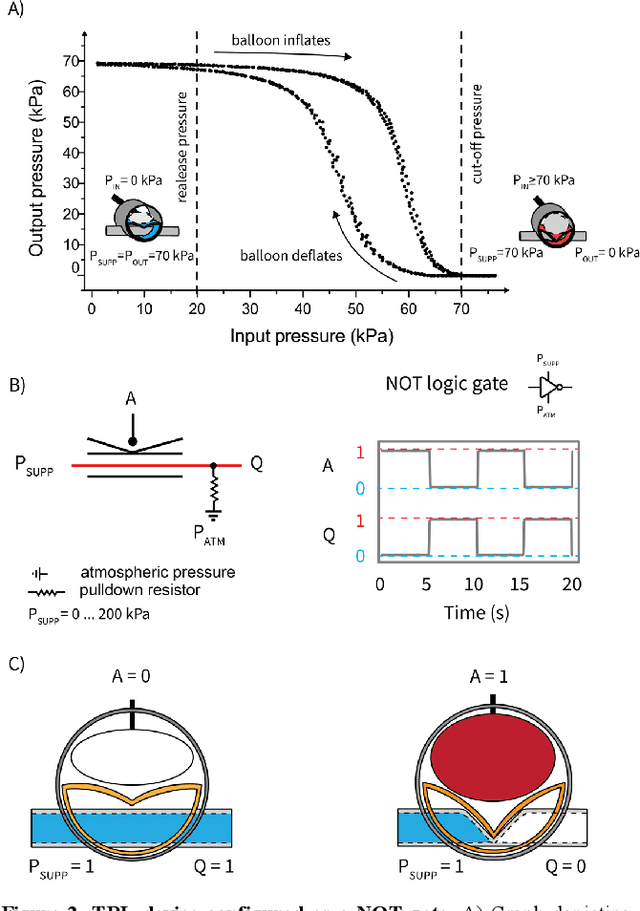
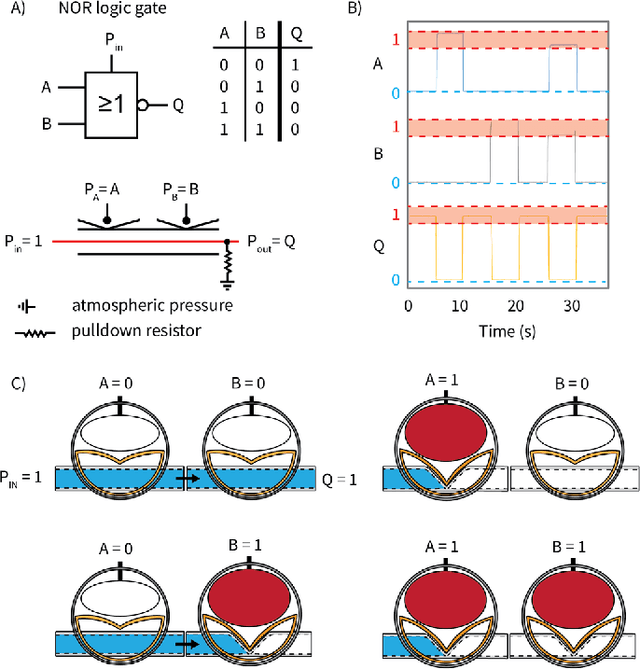
The control of pneumatically driven soft robots typically requires electronics. Microcontrollers are connected to power electronics that switch valves and pumps on and off. As a recent alternative, fluidic control methods have been introduced, in which soft digital logic gates permit multiple actuation states to be achieved in soft systems. Such systems have demonstrated autonomous behaviors without the use of electronics. However, fluidic controllers have required complex fabrication processes. To democratize the exploration of fluidic controllers, we developed tube-balloon logic circuitry, which consists of logic gates made from straws and balloons. Each tube-balloon logic device takes a novice five minutes to fabricate and costs $0.45. Tube-balloon logic devices can also operate at pressures of up to 200 kPa and oscillate at frequencies of up to 15 Hz. We configure the tube-balloon logic device as NOT-, NAND-, and NOR-gates and assemble them into a three-ring oscillator to demonstrate a vibrating sieve that separates sugar from rice. Because tube-balloon logic devices are low-cost, easy to fabricate, and their operating principle is simple, they are well suited for exploring fundamental concepts of fluidic control schemes while encouraging design inquiry for pneumatically driven soft robots
The Soft Compiler: A Web-Based Tool for the Design of Modular Pneumatic Circuits for Soft Robots
Feb 08, 2022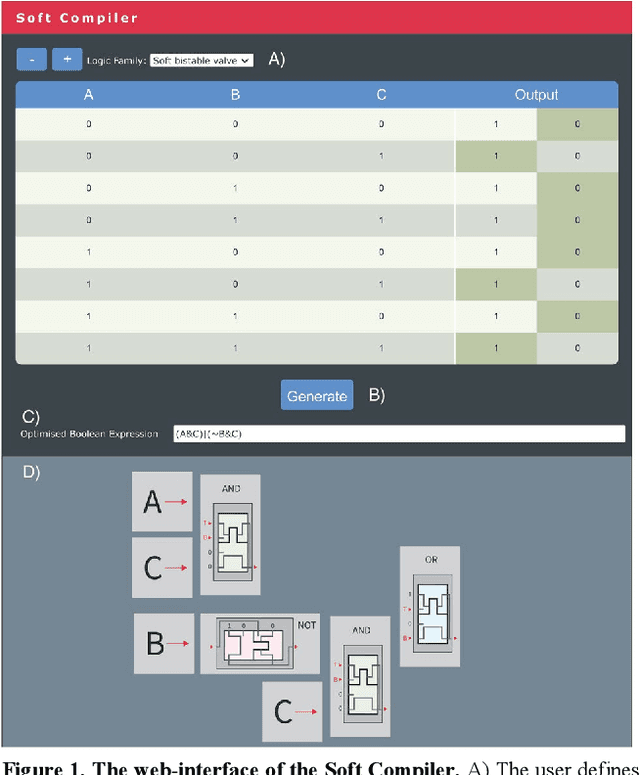
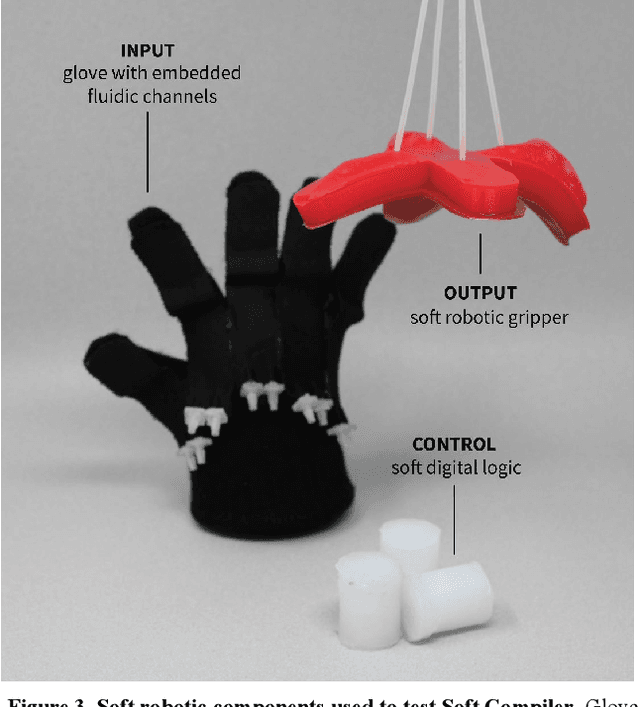
Developing soft circuits from individual soft logic gates poses a unique challenge: with increasing numbers of logic gates, the design and implementation of circuits leads to inefficiencies due to mathematically unoptimized circuits and wiring mistakes during assembly. It is therefore practically important to introduce design tools that support the development of soft circuits. We developed a web-based graphical user interface, the Soft Compiler, that accepts a user-defined robot behavior as a truth table to generate a mathematically optimized circuit diagram that guides the assembly of a soft fluidic circuit. We describe the design and experimental verification of three soft circuits of increasing complexity, using the Soft Compiler as a design tool and a novel pneumatic glove as an input interface. In one example, we reduce the size of a soft circuit from the original 11 logic gates to 4 logic gates while maintaining circuit functionality. The Soft Compiler is a web-based design tool for fluidic, soft circuits and published under open-source MIT License.
Air-Releasable Soft Robots for Explosive Ordnance Disposal
Feb 07, 2022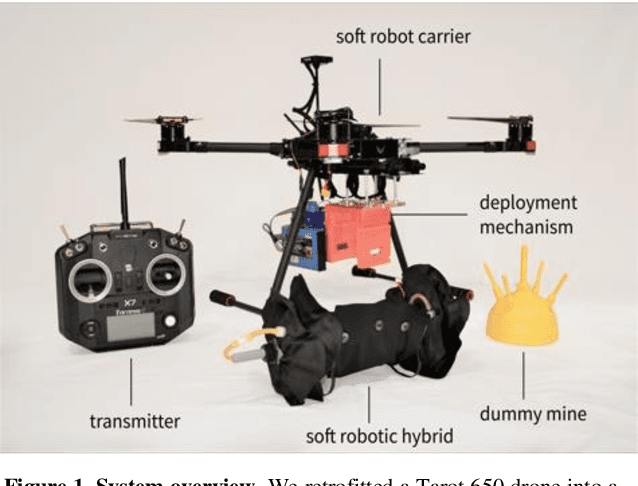
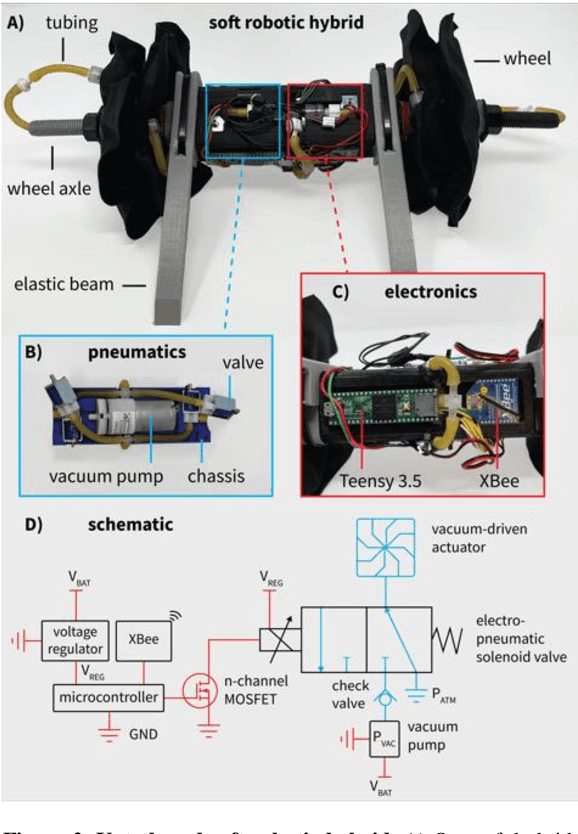
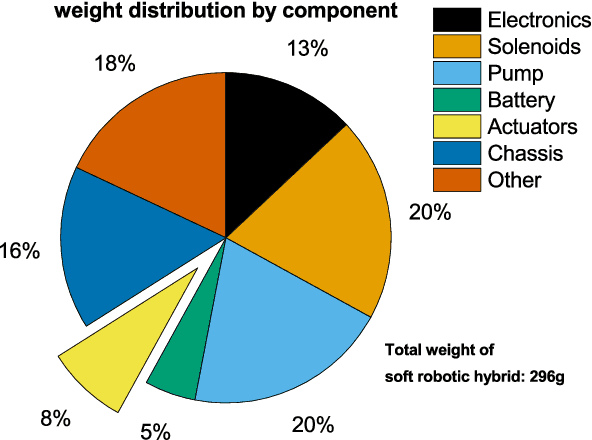
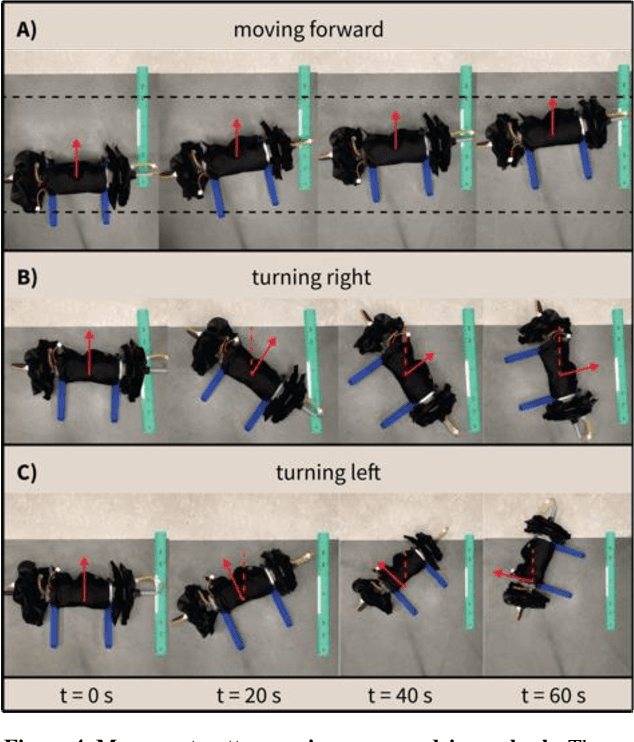
The demining of landmines using drones is challenging; air-releasable payloads are typically non-intelligent (e.g., water balloons or explosives) and deploying them at even low altitudes (~6 meter) is inherently inaccurate due to complex deployment trajectories and constrained visual awareness by the drone pilot. Soft robotics offers a unique approach for aerial demining, namely due to the robust, low-cost, and lightweight designs of soft robots. Instead of non-intelligent payloads, here, we propose the use of air-releasable soft robots for demining. We developed a full system consisting of an unmanned aerial vehicle retrofitted to a soft robot carrier including a custom-made deployment mechanism, and an air-releasable, lightweight (296 g), untethered soft hybrid robot with integrated electronics that incorporates a new type of a vacuum-based flasher roller actuator system. We demonstrate a deployment cycle in which the drone drops the soft robotic hybrid from an altitude of 4.5 m meters and after which the robot approaches a dummy landmine. By deploying soft robots at points of interest, we can transition soft robotic technologies from the laboratory to real-world environments.