 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Language Anchor-Guided Method for Robust Noisy Domain Generalization
Mar 21, 2025Real-world machine learning applications often struggle with two major challenges: distribution shift and label noise. Models tend to overfit by focusing on redundant and uninformative features in the training data, which makes it hard for them to generalize to the target domain. Noisy data worsens this problem by causing further overfitting to the noise, meaning that existing methods often fail to tell the difference between true, invariant features and misleading, spurious ones. To tackle these issues, we introduce Anchor Alignment and Adaptive Weighting (A3W). This new algorithm uses sample reweighting guided by natural language processing (NLP) anchors to extract more representative features. In simple terms, A3W leverages semantic representations from natural language models as a source of domain-invariant prior knowledge. Additionally, it employs a weighted loss function that adjusts each sample's contribution based on its similarity to the corresponding NLP anchor. This adjustment makes the model more robust to noisy labels. Extensive experiments on standard benchmark datasets show that A3W consistently outperforms state-of-the-art domain generalization methods, offering significant improvements in both accuracy and robustness across different datasets and noise levels.
Vision-based FDM Printing for Fabricating Airtight Soft Actuators
Dec 02, 2023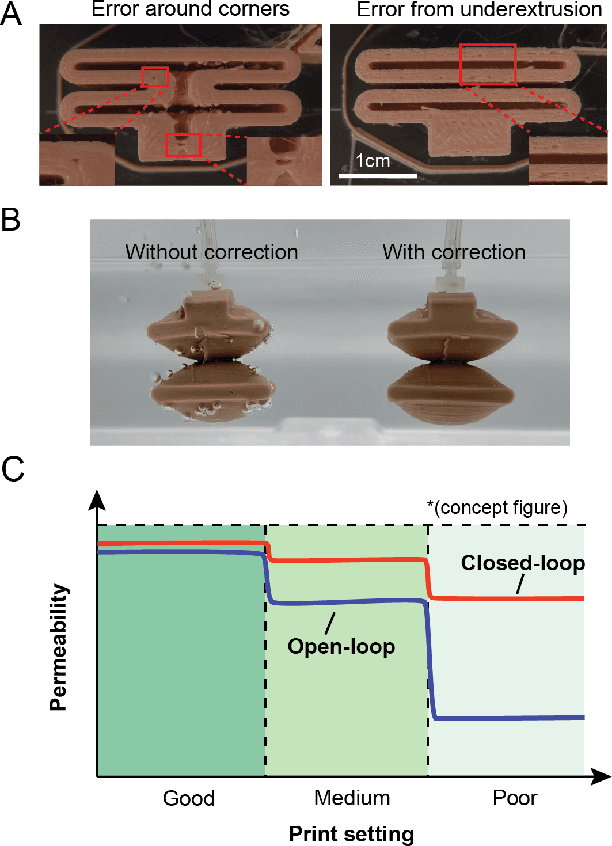
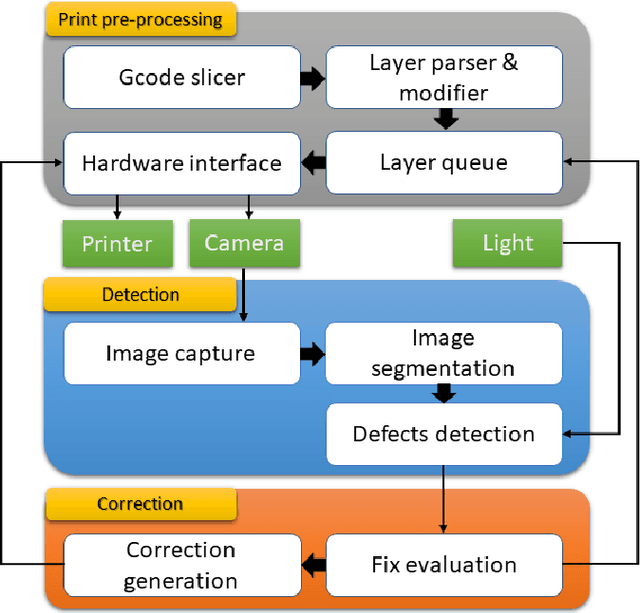
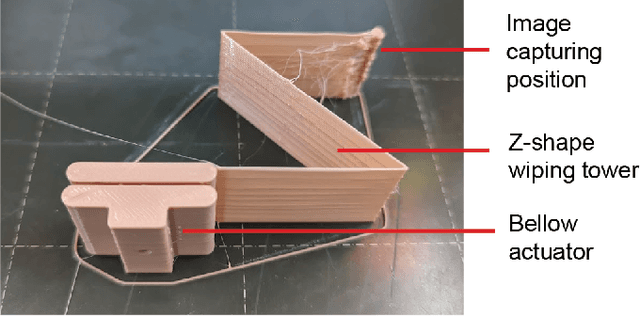

Pneumatic soft robots are typically fabricated by molding, a manual fabrication process that requires skilled labor. Additive manufacturing has the potential to break this limitation and speed up the fabrication process but struggles with consistently producing high-quality prints. We propose a low-cost approach to improve the print quality of desktop fused deposition modeling by adding a webcam to the printer to monitor the printing process and detect and correct defects such as holes or gaps. We demonstrate that our approach improves the air-tightness of printed pneumatic actuators without fine-tuning printing parameters. Our approach presents a new option for robustly fabricating airtight, soft robotic actuators.
FDM Printing: a Fabrication Method for Fluidic Soft Circuits?
Dec 02, 2023



Existing fluidic soft logic gates for the control of soft robots either rely on extensive manual fabrication processes or expensive printing techniques. In our work, we explore Fused Deposition Modeling for creating fully 3D printed fluidic logic gates. We print a soft bistable valve from thermoplastic polyurethane using a desktop FDM printer. We introduce a new printing nozzle for extruding tubing. Our fabrication strategy reduces the production time of soft bistable valves from 27 hours with replica molding to 3 hours with a FDM printer. Our rapid and cost-effective fabrication process for fluidic logic gates seeks to democratize fluidic circuitry for the control of soft robots.
STREAM: Software Tool for Routing Efficiently Advanced Macrofluidics
Dec 02, 2023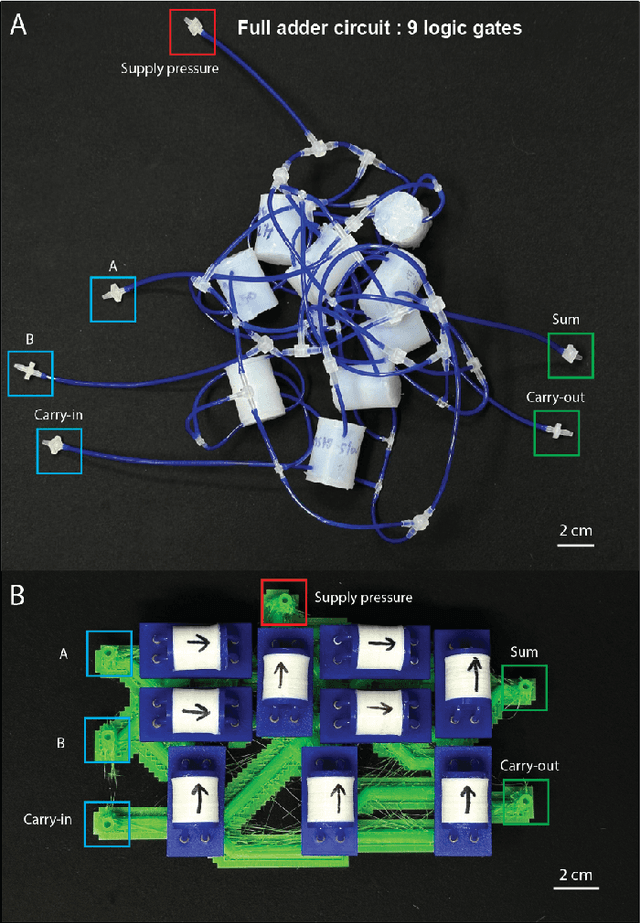



The current fabrication and assembly of fluidic circuits for soft robots relies heavily on manual processes; as the complexity of fluidic circuits increases, manual assembly becomes increasingly arduous, error-prone, and timeconsuming. We introduce a software tool that generates printable fluidic networks automatically. We provide a library of fluidic logic elements that are easily 3D printed from thermoplastic polyurethanes using Fused Deposition Modeling only. Our software tool and component library allow the development of arbitrary soft digital circuits. We demonstrate a variable frequency ring oscillator and a full adder. The simplicity of our approach using FDM printers only, democratizes fluidic circuit implementation beyond specialized laboratories. Our software is available on GitHub (https://github.com/roboticmaterialsgroup/FluidLogic).