 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBridging Large Language Models and Single-Cell Transcriptomics in Dissecting Selective Motor Neuron Vulnerability
May 12, 2025Understanding cell identity and function through single-cell level sequencing data remains a key challenge in computational biology. We present a novel framework that leverages gene-specific textual annotations from the NCBI Gene database to generate biologically contextualized cell embeddings. For each cell in a single-cell RNA sequencing (scRNA-seq) dataset, we rank genes by expression level, retrieve their NCBI Gene descriptions, and transform these descriptions into vector embedding representations using large language models (LLMs). The models used include OpenAI text-embedding-ada-002, text-embedding-3-small, and text-embedding-3-large (Jan 2024), as well as domain-specific models BioBERT and SciBERT. Embeddings are computed via an expression-weighted average across the top N most highly expressed genes in each cell, providing a compact, semantically rich representation. This multimodal strategy bridges structured biological data with state-of-the-art language modeling, enabling more interpretable downstream applications such as cell-type clustering, cell vulnerability dissection, and trajectory inference.
A Language Anchor-Guided Method for Robust Noisy Domain Generalization
Mar 21, 2025Real-world machine learning applications often struggle with two major challenges: distribution shift and label noise. Models tend to overfit by focusing on redundant and uninformative features in the training data, which makes it hard for them to generalize to the target domain. Noisy data worsens this problem by causing further overfitting to the noise, meaning that existing methods often fail to tell the difference between true, invariant features and misleading, spurious ones. To tackle these issues, we introduce Anchor Alignment and Adaptive Weighting (A3W). This new algorithm uses sample reweighting guided by natural language processing (NLP) anchors to extract more representative features. In simple terms, A3W leverages semantic representations from natural language models as a source of domain-invariant prior knowledge. Additionally, it employs a weighted loss function that adjusts each sample's contribution based on its similarity to the corresponding NLP anchor. This adjustment makes the model more robust to noisy labels. Extensive experiments on standard benchmark datasets show that A3W consistently outperforms state-of-the-art domain generalization methods, offering significant improvements in both accuracy and robustness across different datasets and noise levels.
Vision-based FDM Printing for Fabricating Airtight Soft Actuators
Dec 02, 2023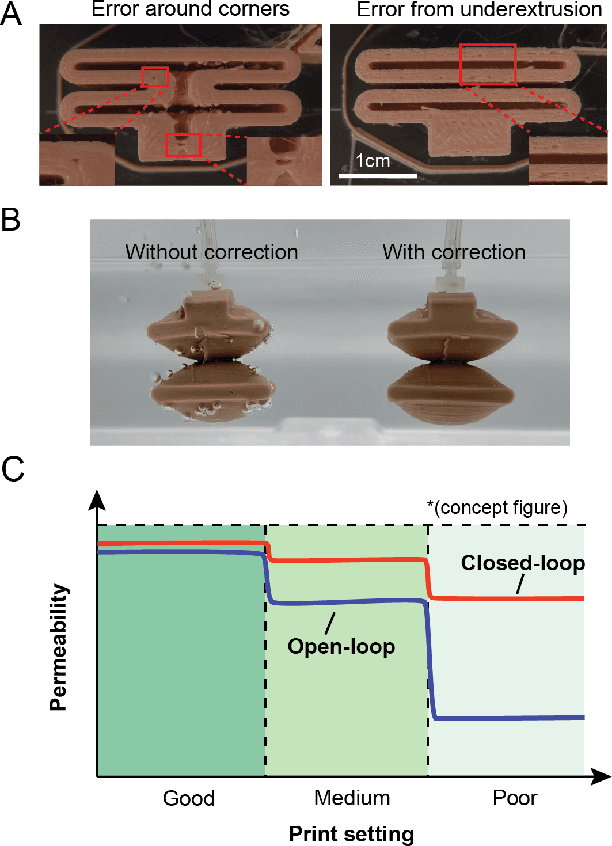
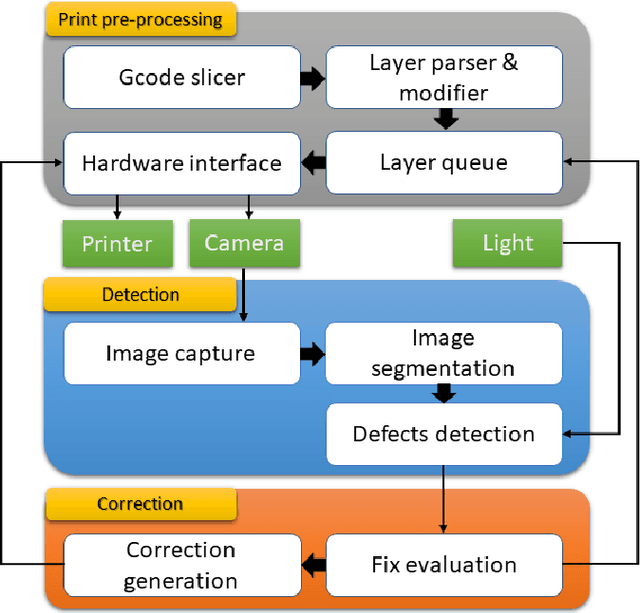
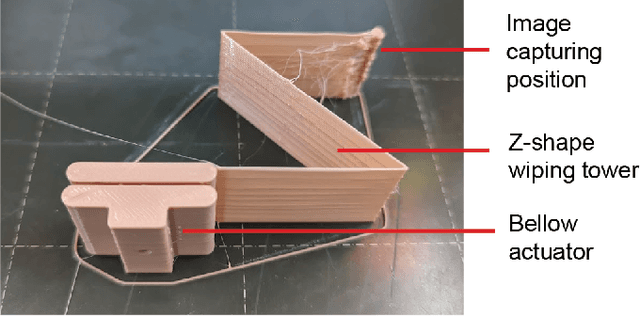

Pneumatic soft robots are typically fabricated by molding, a manual fabrication process that requires skilled labor. Additive manufacturing has the potential to break this limitation and speed up the fabrication process but struggles with consistently producing high-quality prints. We propose a low-cost approach to improve the print quality of desktop fused deposition modeling by adding a webcam to the printer to monitor the printing process and detect and correct defects such as holes or gaps. We demonstrate that our approach improves the air-tightness of printed pneumatic actuators without fine-tuning printing parameters. Our approach presents a new option for robustly fabricating airtight, soft robotic actuators.