 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Deep Nets for Gravitational Dynamics with Unknown Disturbance through Physical Knowledge Distillation: Initial Feasibility Study
Paper and Code
Oct 04, 2022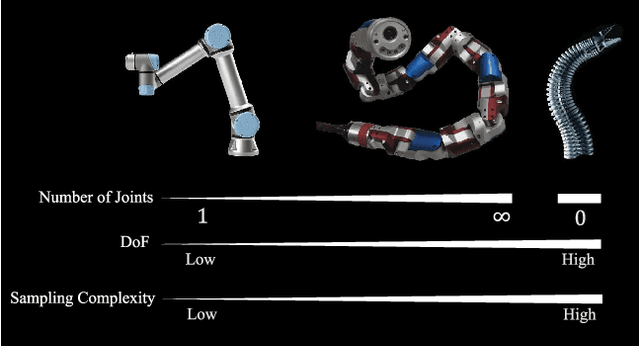
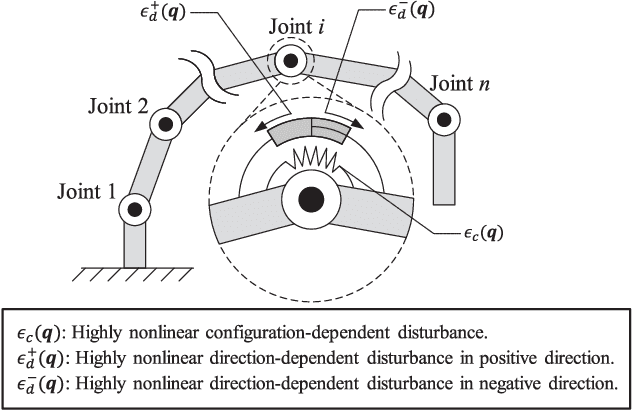
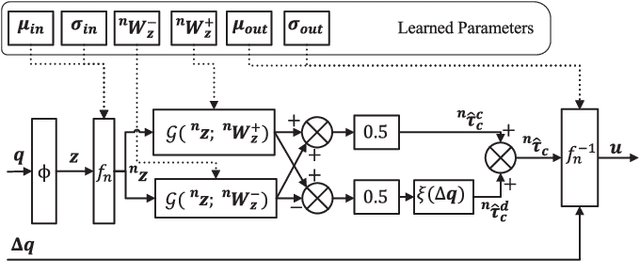
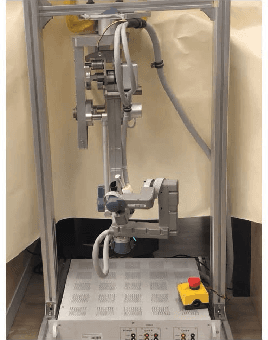
Learning high-performance deep neural networks for dynamic modeling of high Degree-Of-Freedom (DOF) robots remains challenging due to the sampling complexity. Typical unknown system disturbance caused by unmodeled dynamics (such as internal compliance, cables) further exacerbates the problem. In this paper, a novel framework characterized by both high data efficiency and disturbance-adapting capability is proposed to address the problem of modeling gravitational dynamics using deep nets in feedforward gravity compensation control for high-DOF master manipulators with unknown disturbance. In particular, Feedforward Deep Neural Networks (FDNNs) are learned from both prior knowledge of an existing analytical model and observation of the robot system by Knowledge Distillation (KD). Through extensive experiments in high-DOF master manipulators with significant disturbance, we show that our method surpasses a standard Learning-from-Scratch (LfS) approach in terms of data efficiency and disturbance adaptation. Our initial feasibility study has demonstrated the potential of outperforming the analytical teacher model as the training data increases.