 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTouching the tumor boundary: A pilot study on ultrasound based virtual fixtures for breast-conserving surgery
Oct 01, 2025Purpose: Delineating tumor boundaries during breast-conserving surgery is challenging as tumors are often highly mobile, non-palpable, and have irregularly shaped borders. To address these challenges, we introduce a cooperative robotic guidance system that applies haptic feedback for tumor localization. In this pilot study, we aim to assess if and how this system can be successfully integrated into breast cancer care. Methods: A small haptic robot is retrofitted with an electrocautery blade to operate as a cooperatively controlled surgical tool. Ultrasound and electromagnetic navigation are used to identify the tumor boundaries and position. A forbidden region virtual fixture is imposed when the surgical tool collides with the tumor boundary. We conducted a study where users were asked to resect tumors from breast simulants both with and without the haptic guidance. We then assess the results of these simulated resections both qualitatively and quantitatively. Results: Virtual fixture guidance is shown to improve resection margins. On average, users find the task to be less mentally demanding, frustrating, and effort intensive when haptic feedback is available. We also discovered some unanticipated impacts on surgical workflow that will guide design adjustments and training protocol moving forward. Conclusion: Our results suggest that virtual fixtures can help localize tumor boundaries in simulated breast-conserving surgery. Future work will include an extensive user study to further validate these results and fine-tune our guidance system.
An Extended Generalized Prandtl-Ishlinskii Hysteresis Model for I2RIS Robot
Apr 16, 2025Retinal surgery requires extreme precision due to constrained anatomical spaces in the human retina. To assist surgeons achieve this level of accuracy, the Improved Integrated Robotic Intraocular Snake (I2RIS) with dexterous capability has been developed. However, such flexible tendon-driven robots often suffer from hysteresis problems, which significantly challenges precise control and positioning. In particular, we observed multi-stage hysteresis phenomena in the small-scale I2RIS. In this paper, we propose an Extended Generalized Prandtl-Ishlinskii (EGPI) model to increase the fitting accuracy of the hysteresis. The model incorporates a novel switching mechanism that enables it to describe multi-stage hysteresis in the regions of monotonic input. Experimental validation on I2RIS data demonstrate that the EGPI model outperforms the conventional Generalized Prandtl-Ishlinskii (GPI) model in terms of RMSE, NRMSE, and MAE across multiple motor input directions. The EGPI model in our study highlights the potential in modeling multi-stage hysteresis in minimally invasive flexible robots.
Model Predictive Path Integral Control of I2RIS Robot Using RBF Identifier and Extended Kalman Filter
Mar 18, 2025



Modeling and controlling cable-driven snake robots is a challenging problem due to nonlinear mechanical properties such as hysteresis, variable stiffness, and unknown friction between the actuation cables and the robot body. This challenge is more significant for snake robots in ophthalmic surgery applications, such as the Improved Integrated Robotic Intraocular Snake (I$^2$RIS), given its small size and lack of embedded sensory feedback. Data-driven models take advantage of global function approximations, reducing complicated analytical models' challenge and computational costs. However, their performance might deteriorate in case of new data unseen in the training phase. Therefore, adding an adaptation mechanism might improve these models' performance during snake robots' interactions with unknown environments. In this work, we applied a model predictive path integral (MPPI) controller on a data-driven model of the I$^2$RIS based on the Gaussian mixture model (GMM) and Gaussian mixture regression (GMR). To analyze the performance of the MPPI in unseen robot-tissue interaction situations, unknown external disturbances and environmental loads are simulated and added to the GMM-GMR model. These uncertainties of the robot model are then identified online using a radial basis function (RBF) whose weights are updated using an extended Kalman filter (EKF). Simulation results demonstrated the robustness of the optimal control solutions of the MPPI algorithm and its computational superiority over a conventional model predictive control (MPC) algorithm.
Towards a Modern and Lightweight Rendering Engine for Dynamic Robotic Simulations
Oct 07, 2024



Interactive dynamic simulators are an accelerator for developing novel robotic control algorithms and complex systems involving humans and robots. In user training and synthetic data generation applications, a high-fidelity visualization of the simulation is essential. Visual fidelity is dependent on the quality of the computer graphics algorithms used to render the simulated scene. Furthermore, the rendering algorithms must be implemented on the graphics processing unit (GPU) to achieve real-time performance, requiring the use of a graphics application programming interface (API). This paper presents a performance-focused and lightweight rendering engine supporting the Vulkan graphics API. The engine is designed to modernize the legacy rendering pipeline of Asynchronous Multi-Body Framework (AMBF), a dynamic simulation framework used extensively for interactive robotics simulation development. This new rendering engine implements graphical features such as physically based rendering (PBR), anti-aliasing, and ray-traced shadows, significantly improving the image quality of AMBF. Computational experiments show that the engine can render a simulated scene with over seven million triangles while maintaining GPU computation times within two milliseconds.
SurgicAI: A Fine-grained Platform for Data Collection and Benchmarking in Surgical Policy Learning
Jun 19, 2024



Despite advancements in robotic-assisted surgery, automating complex tasks like suturing remain challenging due to the need for adaptability and precision. Learning-based approaches, particularly reinforcement learning (RL) and imitation learning (IL), require realistic simulation environments for efficient data collection. However, current platforms often include only relatively simple, non-dexterous manipulations and lack the flexibility required for effective learning and generalization. We introduce SurgicAI, a novel platform for development and benchmarking addressing these challenges by providing the flexibility to accommodate both modular subtasks and more importantly task decomposition in RL-based surgical robotics. Compatible with the da Vinci Surgical System, SurgicAI offers a standardized pipeline for collecting and utilizing expert demonstrations. It supports deployment of multiple RL and IL approaches, and the training of both singular and compositional subtasks in suturing scenarios, featuring high dexterity and modularization. Meanwhile, SurgicAI sets clear metrics and benchmarks for the assessment of learned policies. We implemented and evaluated multiple RL and IL algorithms on SurgicAI. Our detailed benchmark analysis underscores SurgicAI's potential to advance policy learning in surgical robotics. Details: \url{https://github.com/surgical-robotics-ai/SurgicAI
Improving the realism of robotic surgery simulation through injection of learning-based estimated errors
Jun 11, 2024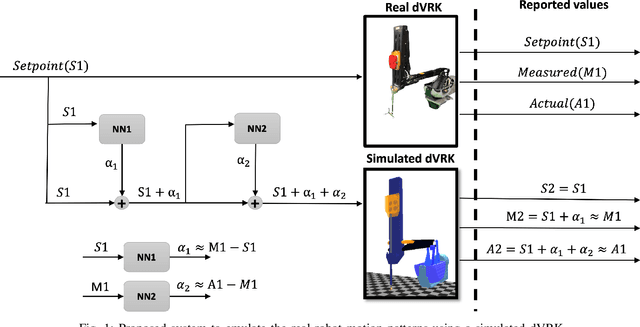

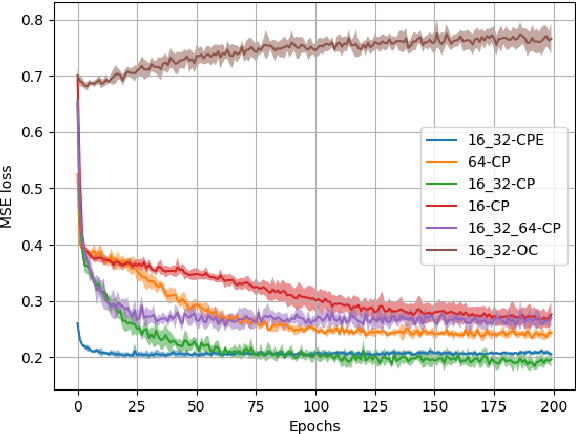

The development of algorithms for automation of subtasks during robotic surgery can be accelerated by the availability of realistic simulation environments. In this work, we focus on one aspect of the realism of a surgical simulator, which is the positional accuracy of the robot. In current simulators, robots have perfect or near-perfect accuracy, which is not representative of their physical counterparts. We therefore propose a pair of neural networks, trained by data collected from a physical robot, to estimate both the controller error and the kinematic and non-kinematic error. These error estimates are then injected within the simulator to produce a simulated robot that has the characteristic performance of the physical robot. In this scenario, we believe it is sufficient for the estimated error used in the simulation to have a statistically similar distribution to the actual error of the physical robot. This is less stringent, and therefore more tenable, than the requirement for error compensation of a physical robot, where the estimated error should equal the actual error. Our results demonstrate that error injection reduces the mean position and orientation differences between the simulated and physical robots from 5.0 mm / 3.6 deg to 1.3 mm / 1.7 deg, respectively, which represents reductions by factors of 3.8 and 2.1.
* 6 page paper
Realistic Data Generation for 6D Pose Estimation of Surgical Instruments
Jun 11, 2024



Automation in surgical robotics has the potential to improve patient safety and surgical efficiency, but it is difficult to achieve due to the need for robust perception algorithms. In particular, 6D pose estimation of surgical instruments is critical to enable the automatic execution of surgical maneuvers based on visual feedback. In recent years, supervised deep learning algorithms have shown increasingly better performance at 6D pose estimation tasks; yet, their success depends on the availability of large amounts of annotated data. In household and industrial settings, synthetic data, generated with 3D computer graphics software, has been shown as an alternative to minimize annotation costs of 6D pose datasets. However, this strategy does not translate well to surgical domains as commercial graphics software have limited tools to generate images depicting realistic instrument-tissue interactions. To address these limitations, we propose an improved simulation environment for surgical robotics that enables the automatic generation of large and diverse datasets for 6D pose estimation of surgical instruments. Among the improvements, we developed an automated data generation pipeline and an improved surgical scene. To show the applicability of our system, we generated a dataset of 7.5k images with pose annotations of a surgical needle that was used to evaluate a state-of-the-art pose estimation network. The trained model obtained a mean translational error of 2.59mm on a challenging dataset that presented varying levels of occlusion. These results highlight our pipeline's success in training and evaluating novel vision algorithms for surgical robotics applications.
* 6 pages
Haptic-Assisted Collaborative Robot Framework for Improved Situational Awareness in Skull Base Surgery
Jan 22, 2024Skull base surgery is a demanding field in which surgeons operate in and around the skull while avoiding critical anatomical structures including nerves and vasculature. While image-guided surgical navigation is the prevailing standard, limitation still exists requiring personalized planning and recognizing the irreplaceable role of a skilled surgeon. This paper presents a collaboratively controlled robotic system tailored for assisted drilling in skull base surgery. Our central hypothesis posits that this collaborative system, enriched with haptic assistive modes to enforce virtual fixtures, holds the potential to significantly enhance surgical safety, streamline efficiency, and alleviate the physical demands on the surgeon. The paper describes the intricate system development work required to enable these virtual fixtures through haptic assistive modes. To validate our system's performance and effectiveness, we conducted initial feasibility experiments involving a medical student and two experienced surgeons. The experiment focused on drilling around critical structures following cortical mastoidectomy, utilizing dental stone phantom and cadaveric models. Our experimental results demonstrate that our proposed haptic feedback mechanism enhances the safety of drilling around critical structures compared to systems lacking haptic assistance. With the aid of our system, surgeons were able to safely skeletonize the critical structures without breaching any critical structure even under obstructed view of the surgical site.
Integrating 3D Slicer with a Dynamic Simulator for Situational Aware Robotic Interventions
Jan 22, 2024



Image-guided robotic interventions represent a transformative frontier in surgery, blending advanced imaging and robotics for improved precision and outcomes. This paper addresses the critical need for integrating open-source platforms to enhance situational awareness in image-guided robotic research. We present an open-source toolset that seamlessly combines a physics-based constraint formulation framework, AMBF, with a state-of-the-art imaging platform application, 3D Slicer. Our toolset facilitates the creation of highly customizable interactive digital twins, that incorporates processing and visualization of medical imaging, robot kinematics, and scene dynamics for real-time robot control. Through a feasibility study, we showcase real-time synchronization of a physical robotic interventional environment in both 3D Slicer and AMBF, highlighting low-latency updates and improved visualization.
A Data-Driven Model with Hysteresis Compensation for I2RIS Robot
Mar 10, 2023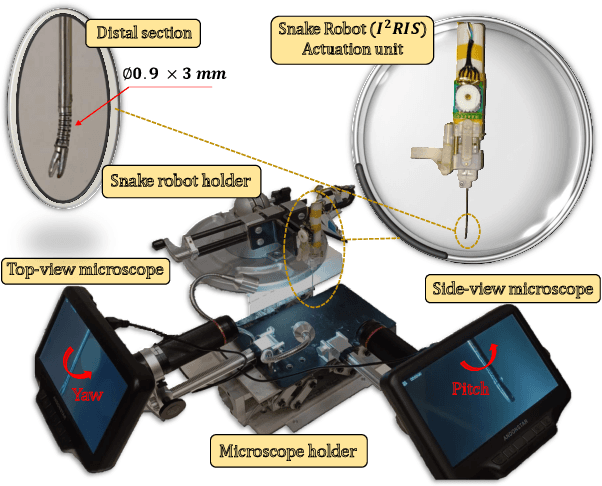
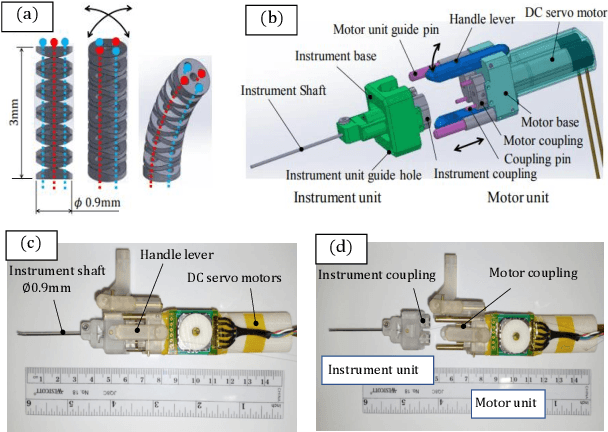
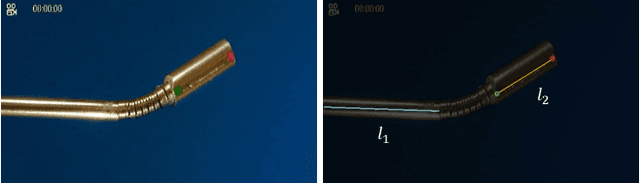
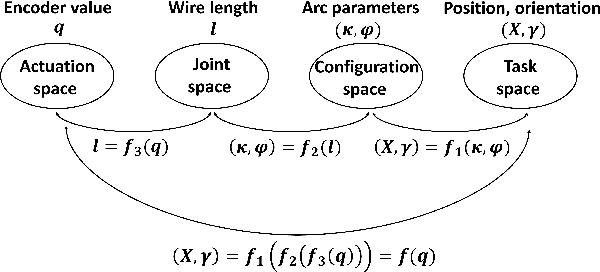
Retinal microsurgery is a high-precision surgery performed on an exceedingly delicate tissue. It now requires extensively trained and highly skilled surgeons. Given the restricted range of instrument motion in the confined intraocular space, and also potentially restricting instrument contact with the sclera, snake-like robots may prove to be a promising technology to provide surgeons with greater flexibility, dexterity, space access, and positioning accuracy during retinal procedures requiring high precision and advantageous tooltip approach angles, such as retinal vein cannulation and epiretinal membrane peeling. Kinematics modeling of these robots is an essential step toward accurate position control, however, as opposed to conventional manipulators, modeling of these robots does not follow a straightforward method due to their complex mechanical structure and actuation mechanisms. Especially, in wire-driven snake-like robots, the hysteresis problem due to the wire tension condition can have a significant impact on the positioning accuracy of these robots. In this paper, we proposed an experimental kinematics model with a hysteresis compensation algorithm using the probabilistic Gaussian mixture models (GMM) Gaussian mixture regression (GMR) approach. Experimental results on the two-degree-of-freedom (DOF) integrated robotic intraocular snake (I2RIS) show that the proposed model provides 0.4 deg accuracy, which is an overall 60% and 70% of improvement for yaw and pitch degrees of freedom, respectively, compared to a previous model of this robot.