 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeImproving Surgical Situational Awareness with Signed Distance Field: A Pilot Study in Virtual Reality
Mar 03, 2023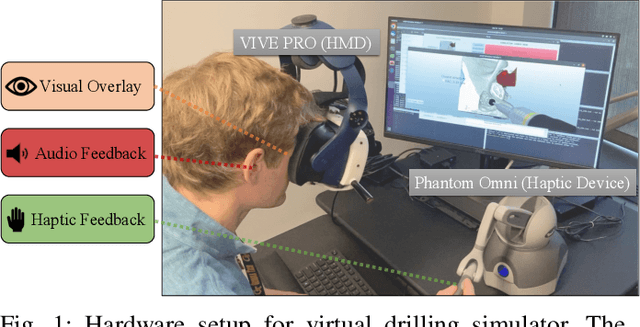
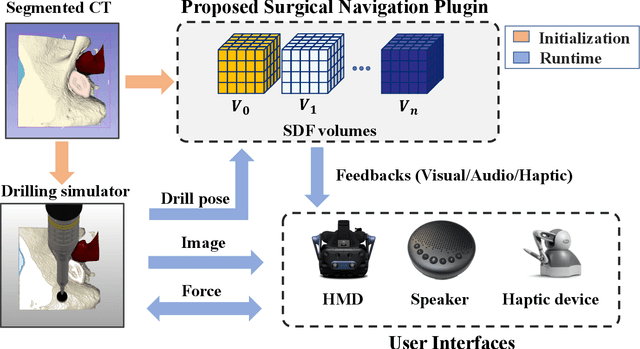
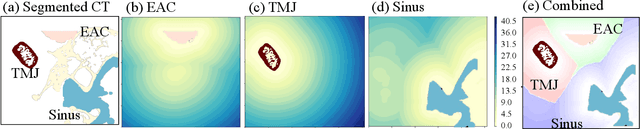
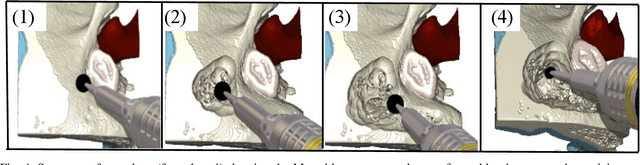
The introduction of image-guided surgical navigation (IGSN) has greatly benefited technically demanding surgical procedures by providing real-time support and guidance to the surgeon during surgery. To develop effective IGSN, a careful selection of the information provided to the surgeon is needed. However, identifying optimal feedback modalities is challenging due to the broad array of available options. To address this problem, we have developed an open-source library that facilitates the development of multimodal navigation systems in a wide range of surgical procedures relying on medical imaging data. To provide guidance, our system calculates the minimum distance between the surgical instrument and the anatomy and then presents this information to the user through different mechanisms. The real-time performance of our approach is achieved by calculating Signed Distance Fields at initialization from segmented anatomical volumes. Using this framework, we developed a multimodal surgical navigation system to help surgeons navigate anatomical variability in a skull-base surgery simulation environment. Three different feedback modalities were explored: visual, auditory, and haptic. To evaluate the proposed system, a pilot user study was conducted in which four clinicians performed mastoidectomy procedures with and without guidance. Each condition was assessed using objective performance and subjective workload metrics. This pilot user study showed improvements in procedural safety without additional time or workload. These results demonstrate our pipeline's successful use case in the context of mastoidectomy.
Fully Immersive Virtual Reality for Skull-base Surgery: Surgical Training and Beyond
Feb 27, 2023Purpose: A fully immersive virtual reality system (FIVRS), where surgeons can practice procedures on virtual anatomies, is a scalable and cost-effective alternative to cadaveric training. The fully digitized virtual surgeries can also be used to assess the surgeon's skills automatically using metrics that are otherwise hard to collect in reality. Thus, we present FIVRS, a virtual reality (VR) system designed for skull-base surgery, which combines high-fidelity surgical simulation software with a real hardware setup. Methods: FIVRS integrates software and hardware features to allow surgeons to use normal clinical workflows for VR. FIVRS uses advanced rendering designs and drilling algorithms for realistic surgery. We also design a head-mounted display with ergonomics similar to that of surgical microscopes. A plethora of digitized data of VR surgery are recorded, including eye gaze, motion, force and video of the surgery for post-analysis. A user-friendly interface is also designed to ease the learning curve of using FIVRS. Results: We present results from a user study involving surgeons to showcase the efficacy FIVRS and its generated data. Conclusion: We present FIVRS, a fully immersive VR system for skull base surgery. FIVRS features a realistic software simulation coupled with modern hardware for improved realism. The system is completely open-source and provides feature-rich data in an industry-standard format.