 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDWA
Papers and Code
Adaptive Reinforcement and Model Predictive Control Switching for Safe Human-Robot Cooperative Navigation
Jan 23, 2026This paper addresses the challenge of human-guided navigation for mobile collaborative robots under simultaneous proximity regulation and safety constraints. We introduce Adaptive Reinforcement and Model Predictive Control Switching (ARMS), a hybrid learning-control framework that integrates a reinforcement learning follower trained with Proximal Policy Optimization (PPO) and an analytical one-step Model Predictive Control (MPC) formulated as a quadratic program safety filter. To enable robust perception under partial observability and non-stationary human motion, ARMS employs a decoupled sensing architecture with a Long Short-Term Memory (LSTM) temporal encoder for the human-robot relative state and a spatial encoder for 360-degree LiDAR scans. The core contribution is a learned adaptive neural switcher that performs context-aware soft action fusion between the two controllers, favoring conservative, constraint-aware QP-based control in low-risk regions while progressively shifting control authority to the learned follower in highly cluttered or constrained scenarios where maneuverability is critical, and reverting to the follower action when the QP becomes infeasible. Extensive evaluations against Pure Pursuit, Dynamic Window Approach (DWA), and an RL-only baseline demonstrate that ARMS achieves an 82.5 percent success rate in highly cluttered environments, outperforming DWA and RL-only approaches by 7.1 percent and 3.1 percent, respectively, while reducing average computational latency by 33 percent to 5.2 milliseconds compared to a multi-step MPC baseline. Additional simulation transfer in Gazebo and initial real-world deployment results further indicate the practicality and robustness of ARMS for safe and efficient human-robot collaboration. Source code and a demonstration video are available at https://github.com/21ning/ARMS.git.
A new data weighted averaging algorithm to reduce tones in the signal band
Dec 15, 2025Digital/Analog converters based on sigma-delta modulation are simple and unexpensive circuits featuring a signal bandwidth limited by speed constraints. Multi-bit modulators allow balancing complexity and speed by reducing the clock frequency and increasing the number of levels in the quantizer. In this case, the multi-bit digital to analog block (DAC) can reduce the performance of the entire system. Data Weighted Averaging (DWA) methods have been proposed to reduce the vulnerability to DAC errors at the cost of spurious tones in the signal band. This work analyzes the tone producing mechanism and proposes a modification of the DWA to remove spurious tones.
Digital Twin Supervised Reinforcement Learning Framework for Autonomous Underwater Navigation
Dec 11, 2025Autonomous navigation in underwater environments remains a major challenge due to the absence of GPS, degraded visibility, and the presence of submerged obstacles. This article investigates these issues through the case of the BlueROV2, an open platform widely used for scientific experimentation. We propose a deep reinforcement learning approach based on the Proximal Policy Optimization (PPO) algorithm, using an observation space that combines target-oriented navigation information, a virtual occupancy grid, and ray-casting along the boundaries of the operational area. The learned policy is compared against a reference deterministic kinematic planner, the Dynamic Window Approach (DWA), commonly employed as a robust baseline for obstacle avoidance. The evaluation is conducted in a realistic simulation environment and complemented by validation on a physical BlueROV2 supervised by a 3D digital twin of the test site, helping to reduce risks associated with real-world experimentation. The results show that the PPO policy consistently outperforms DWA in highly cluttered environments, notably thanks to better local adaptation and reduced collisions. Finally, the experiments demonstrate the transferability of the learned behavior from simulation to the real world, confirming the relevance of deep RL for autonomous navigation in underwater robotics.
DR. Nav: Semantic-Geometric Representations for Proactive Dead-End Recovery and Navigation
Nov 16, 2025We present DR. Nav (Dead-End Recovery-aware Navigation), a novel approach to autonomous navigation in scenarios where dead-end detection and recovery are critical, particularly in unstructured environments where robots must handle corners, vegetation occlusions, and blocked junctions. DR. Nav introduces a proactive strategy for navigation in unmapped environments without prior assumptions. Our method unifies dead-end prediction and recovery by generating a single, continuous, real-time semantic cost map. Specifically, DR. Nav leverages cross-modal RGB-LiDAR fusion with attention-based filtering to estimate per-cell dead-end likelihoods and recovery points, which are continuously updated through Bayesian inference to enhance robustness. Unlike prior mapping methods that only encode traversability, DR. Nav explicitly incorporates recovery-aware risk into the navigation cost map, enabling robots to anticipate unsafe regions and plan safer alternative trajectories. We evaluate DR. Nav across multiple dense indoor and outdoor scenarios and demonstrate an increase of 83.33% in accuracy in detection, a 52.4% reduction in time-to-goal (path efficiency), compared to state-of-the-art planners such as DWA, MPPI, and Nav2 DWB. Furthermore, the dead-end classifier functions
Gradient Field-Based Dynamic Window Approach for Collision Avoidance in Complex Environments
Apr 04, 2025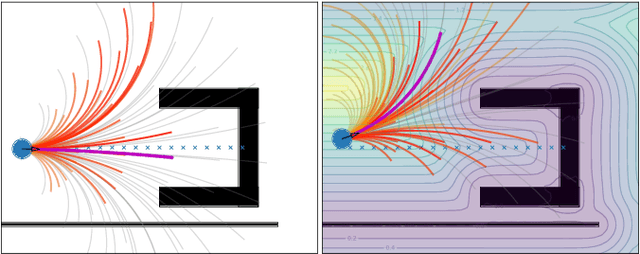
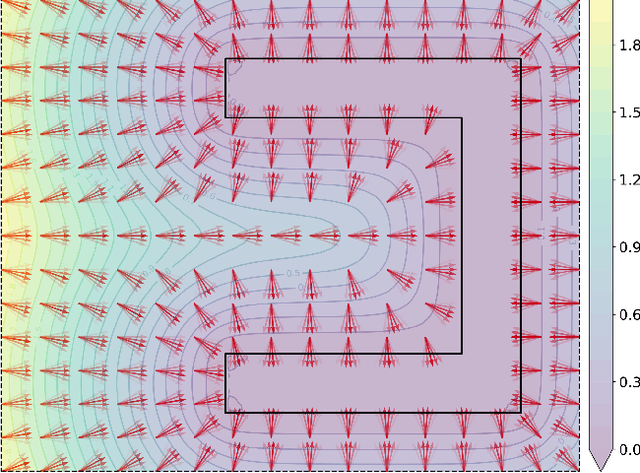
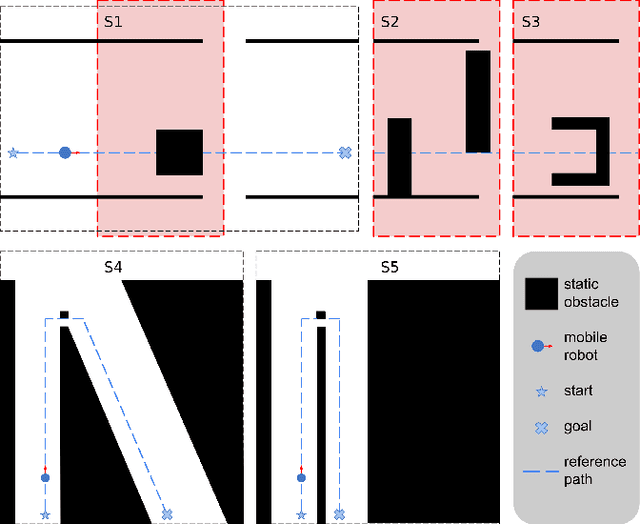
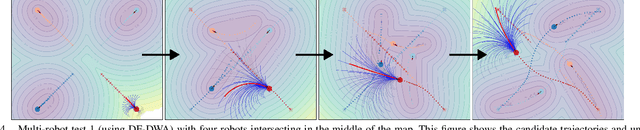
For safe and flexible navigation in multi-robot systems, this paper presents an enhanced and predictive sampling-based trajectory planning approach in complex environments, the Gradient Field-based Dynamic Window Approach (GF-DWA). Building upon the dynamic window approach, the proposed method utilizes gradient information of obstacle distances as a new cost term to anticipate potential collisions. This enhancement enables the robot to improve awareness of obstacles, including those with non-convex shapes. The gradient field is derived from the Gaussian process distance field, which generates both the distance field and gradient field by leveraging Gaussian process regression to model the spatial structure of the environment. Through several obstacle avoidance and fleet collision avoidance scenarios, the proposed GF-DWA is shown to outperform other popular trajectory planning and control methods in terms of safety and flexibility, especially in complex environments with non-convex obstacles.
Inverse RL Scene Dynamics Learning for Nonlinear Predictive Control in Autonomous Vehicles
Apr 02, 2025



This paper introduces the Deep Learning-based Nonlinear Model Predictive Controller with Scene Dynamics (DL-NMPC-SD) method for autonomous navigation. DL-NMPC-SD uses an a-priori nominal vehicle model in combination with a scene dynamics model learned from temporal range sensing information. The scene dynamics model is responsible for estimating the desired vehicle trajectory, as well as to adjust the true system model used by the underlying model predictive controller. We propose to encode the scene dynamics model within the layers of a deep neural network, which acts as a nonlinear approximator for the high order state-space of the operating conditions. The model is learned based on temporal sequences of range sensing observations and system states, both integrated by an Augmented Memory component. We use Inverse Reinforcement Learning and the Bellman optimality principle to train our learning controller with a modified version of the Deep Q-Learning algorithm, enabling us to estimate the desired state trajectory as an optimal action-value function. We have evaluated DL-NMPC-SD against the baseline Dynamic Window Approach (DWA), as well as against two state-of-the-art End2End and reinforcement learning methods, respectively. The performance has been measured in three experiments: i) in our GridSim virtual environment, ii) on indoor and outdoor navigation tasks using our RovisLab AMTU (Autonomous Mobile Test Unit) platform and iii) on a full scale autonomous test vehicle driving on public roads.
* 21 pages, 14 figures, journal paper
Development of an indoor localization and navigation system based on monocular SLAM for mobile robots
Nov 08, 2024Localization and navigation are two crucial issues for mobile robots. In this paper, we propose an approach for localization and navigation systems for a differential-drive robot based on monocular SLAM. The system is implemented on the Robot Operating System (ROS). The hardware includes a differential-drive robot with an embedded computing platform (Jetson Xavier AGX), a 2D camera, and a LiDAR sensor for collecting external environmental information. The A* algorithm and Dynamic Window Approach (DWA) are used for path planning based on a 2D grid map. The ORB_SLAM3 algorithm is utilized to extract environmental features, providing the robot's pose for the localization and navigation processes. Finally, the system is tested in the Gazebo simulation environment and visualized through Rviz, demonstrating the efficiency and potential of the system for indoor localization and navigation of mobile robots.
Toward Integrating Semantic-aware Path Planning and Reliable Localization for UAV Operations
Nov 04, 2024

Localization is one of the most crucial tasks for Unmanned Aerial Vehicle systems (UAVs) directly impacting overall performance, which can be achieved with various sensors and applied to numerous tasks related to search and rescue operations, object tracking, construction, etc. However, due to the negative effects of challenging environments, UAVs may lose signals for localization. In this paper, we present an effective path-planning system leveraging semantic segmentation information to navigate around texture-less and problematic areas like lakes, oceans, and high-rise buildings using a monocular camera. We introduce a real-time semantic segmentation architecture and a novel keyframe decision pipeline to optimize image inputs based on pixel distribution, reducing processing time. A hierarchical planner based on the Dynamic Window Approach (DWA) algorithm, integrated with a cost map, is designed to facilitate efficient path planning. The system is implemented in a photo-realistic simulation environment using Unity, aligning with segmentation model parameters. Comprehensive qualitative and quantitative evaluations validate the effectiveness of our approach, showing significant improvements in the reliability and efficiency of UAV localization in challenging environments.
Deep-Sea A*+: An Advanced Path Planning Method Integrating Enhanced A* and Dynamic Window Approach for Autonomous Underwater Vehicles
Oct 22, 2024



As terrestrial resources become increasingly depleted, the demand for deep-sea resource exploration has intensified. However, the extreme conditions in the deep-sea environment pose significant challenges for underwater operations, necessitating the development of robust detection robots. In this paper, we propose an advanced path planning methodology that integrates an improved A* algorithm with the Dynamic Window Approach (DWA). By optimizing the search direction of the traditional A* algorithm and introducing an enhanced evaluation function, our improved A* algorithm accelerates path searching and reduces computational load. Additionally, the path-smoothing process has been refined to improve continuity and smoothness, minimizing sharp turns. This method also integrates global path planning with local dynamic obstacle avoidance via DWA, improving the real-time response of underwater robots in dynamic environments. Simulation results demonstrate that our proposed method surpasses the traditional A* algorithm in terms of path smoothness, obstacle avoidance, and real-time performance. The robustness of this approach in complex environments with both static and dynamic obstacles highlights its potential in autonomous underwater vehicle (AUV) navigation and obstacle avoidance.
Automatic Navigation and Voice Cloning Technology Deployment on a Humanoid Robot
Oct 17, 2024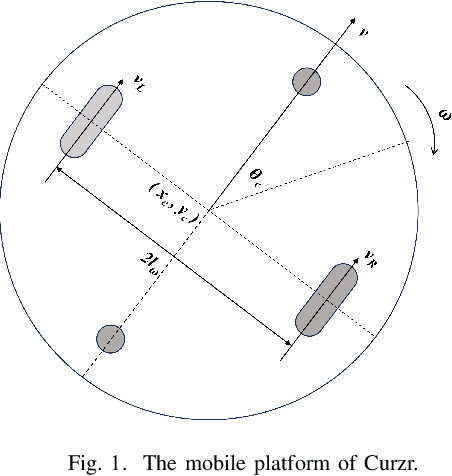

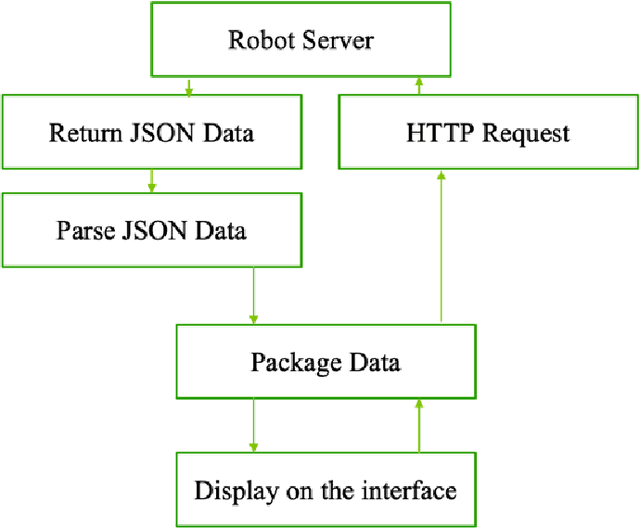
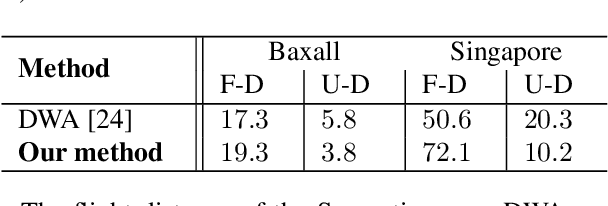
Mobile robots have shown immense potential and are expected to be widely used in the service industry. The importance of automatic navigation and voice cloning cannot be overstated as they enable functional robots to provide high-quality services. The objective of this work is to develop a control algorithm for the automatic navigation of a humanoid mobile robot called Cruzr, which is a service robot manufactured by Ubtech. Initially, a virtual environment is constructed in the simulation software Gazebo using Simultaneous Localization And Mapping (SLAM), and global path planning is carried out by means of local path tracking. The two-wheel differential chassis kinematics model is employed to ensure autonomous dynamic obstacle avoidance for the robot chassis. Furthermore, the mapping and trajectory generation algorithms developed in the simulation environment are successfully implemented on the real robot Cruzr. The performance of automatic navigation is compared between the Dynamic Window Approach (DWA) and Model Predictive Control (MPC) algorithms. Additionally, a mobile application for voice cloning is created based on a Hidden Markov Model, and the proposed Chatbot is also tested and deployed on Cruzr.