 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Navigation and Voice Cloning Technology Deployment on a Humanoid Robot
Oct 17, 2024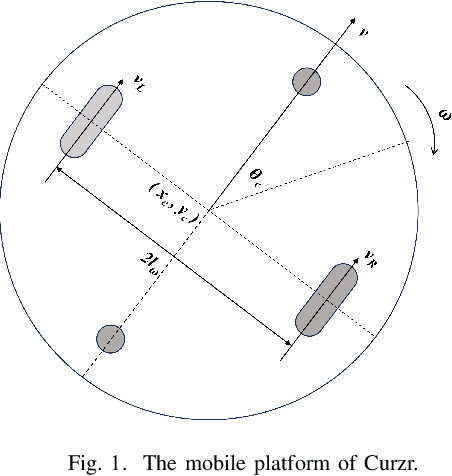

Mobile robots have shown immense potential and are expected to be widely used in the service industry. The importance of automatic navigation and voice cloning cannot be overstated as they enable functional robots to provide high-quality services. The objective of this work is to develop a control algorithm for the automatic navigation of a humanoid mobile robot called Cruzr, which is a service robot manufactured by Ubtech. Initially, a virtual environment is constructed in the simulation software Gazebo using Simultaneous Localization And Mapping (SLAM), and global path planning is carried out by means of local path tracking. The two-wheel differential chassis kinematics model is employed to ensure autonomous dynamic obstacle avoidance for the robot chassis. Furthermore, the mapping and trajectory generation algorithms developed in the simulation environment are successfully implemented on the real robot Cruzr. The performance of automatic navigation is compared between the Dynamic Window Approach (DWA) and Model Predictive Control (MPC) algorithms. Additionally, a mobile application for voice cloning is created based on a Hidden Markov Model, and the proposed Chatbot is also tested and deployed on Cruzr.