 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Optimization for Multi-Camera 3D Detection and Tracking
Feb 03, 2026Outside-in multi-camera perception is increasingly important in indoor environments, where networks of static cameras must support multi-target tracking under occlusion and heterogeneous viewpoints. We evaluate Sparse4D, a query-based spatiotemporal 3D detection and tracking framework that fuses multi-view features in a shared world frame and propagates sparse object queries via instance memory. We study reduced input frame rates, post-training quantization (INT8 and FP8), transfer to the WILDTRACK benchmark, and Transformer Engine mixed-precision fine-tuning. To better capture identity stability, we report Average Track Duration (AvgTrackDur), which measures identity persistence in seconds. Sparse4D remains stable under moderate FPS reductions, but below 2 FPS, identity association collapses even when detections are stable. Selective quantization of the backbone and neck offers the best speed-accuracy trade-off, while attention-related modules are consistently sensitive to low precision. On WILDTRACK, low-FPS pretraining yields large zero-shot gains over the base checkpoint, while small-scale fine-tuning provides limited additional benefit. Transformer Engine mixed precision reduces latency and improves camera scalability, but can destabilize identity propagation, motivating stability-aware validation.
Deep g-Pricing for CSI 300 Index Options with Volatility Trajectories and Market Sentiment
Jan 15, 2026Option pricing in real markets faces fundamental challenges. The Black--Scholes--Merton (BSM) model assumes constant volatility and uses a linear generator $g(t,x,y,z)=-ry$, while lacking explicit behavioral factors, resulting in systematic departures from observed dynamics. This paper extends the BSM model by learning a nonlinear generator within a deep Forward--Backward Stochastic Differential Equation (FBSDE) framework. We propose a dual-network architecture where the value network $u_θ$ learns option prices and the generator network $g_φ$ characterizes the pricing mechanism, with the hedging strategy $Z_t=σ_t X_t \nabla_x u_θ$ obtained via automatic differentiation. The framework adopts forward recursion from a learnable initial condition $Y_0=u_θ(0,\cdot)$, naturally accommodating volatility trajectory and sentiment features. Empirical results on CSI 300 index options show that our method reduces Mean Absolute Error (MAE) by 32.2\% and Mean Absolute Percentage Error (MAPE) by 35.3\% compared with BSM. Interpretability analysis indicates that architectural improvements are effective across all option types, while the information advantage is asymmetric between calls and puts. Specifically, call option improvements are primarily driven by sentiment features, whereas put options show more balanced contributions from volatility trajectory and sentiment features. This finding aligns with economic intuition regarding option pricing mechanisms.
A Unified 3D Object Perception Framework for Real-Time Outside-In Multi-Camera Systems
Jan 15, 2026Accurate 3D object perception and multi-target multi-camera (MTMC) tracking are fundamental for the digital transformation of industrial infrastructure. However, transitioning "inside-out" autonomous driving models to "outside-in" static camera networks presents significant challenges due to heterogeneous camera placements and extreme occlusion. In this paper, we present an adapted Sparse4D framework specifically optimized for large-scale infrastructure environments. Our system leverages absolute world-coordinate geometric priors and introduces an occlusion-aware ReID embedding module to maintain identity stability across distributed sensor networks. To bridge the Sim2Real domain gap without manual labeling, we employ a generative data augmentation strategy using the NVIDIA COSMOS framework, creating diverse environmental styles that enhance the model's appearance-invariance. Evaluated on the AI City Challenge 2025 benchmark, our camera-only framework achieves a state-of-the-art HOTA of $45.22$. Furthermore, we address real-time deployment constraints by developing an optimized TensorRT plugin for Multi-Scale Deformable Aggregation (MSDA). Our hardware-accelerated implementation achieves a $2.15\times$ speedup on modern GPU architectures, enabling a single Blackwell-class GPU to support over 64 concurrent camera streams.
Dynamic Noise Preference Optimization for LLM Self-Improvement via Synthetic Data
Feb 08, 2025



Although LLMs have achieved significant success, their reliance on large volumes of human-annotated data has limited their potential for further scaling. In this situation, utilizing self-generated synthetic data has become crucial for fine-tuning LLMs without extensive human annotation. However, current methods often fail to ensure consistent improvements across iterations, with performance stagnating after only minimal updates. To overcome these challenges, we introduce Dynamic Noise Preference Optimization (DNPO). DNPO employs a dynamic sample labeling mechanism to construct preference pairs for training and introduces controlled, trainable noise into the preference optimization process. Our approach effectively prevents stagnation and enables continuous improvement. In experiments with Zephyr-7B, DNPO consistently outperforms existing methods, showing an average performance boost of 2.6% across multiple benchmarks. Additionally, DNPO shows a significant improvement in model-generated data quality, with a 29.4% win-loss rate gap compared to the baseline in GPT-4 evaluations. This highlights its effectiveness in enhancing model performance through iterative refinement.
BEV-SUSHI: Multi-Target Multi-Camera 3D Detection and Tracking in Bird's-Eye View
Dec 01, 2024



Object perception from multi-view cameras is crucial for intelligent systems, particularly in indoor environments, e.g., warehouses, retail stores, and hospitals. Most traditional multi-target multi-camera (MTMC) detection and tracking methods rely on 2D object detection, single-view multi-object tracking (MOT), and cross-view re-identification (ReID) techniques, without properly handling important 3D information by multi-view image aggregation. In this paper, we propose a 3D object detection and tracking framework, named BEV-SUSHI, which first aggregates multi-view images with necessary camera calibration parameters to obtain 3D object detections in bird's-eye view (BEV). Then, we introduce hierarchical graph neural networks (GNNs) to track these 3D detections in BEV for MTMC tracking results. Unlike existing methods, BEV-SUSHI has impressive generalizability across different scenes and diverse camera settings, with exceptional capability for long-term association handling. As a result, our proposed BEV-SUSHI establishes the new state-of-the-art on the AICity'24 dataset with 81.22 HOTA, and 95.6 IDF1 on the WildTrack dataset.
Radiance Field Learners As UAV First-Person Viewers
Aug 10, 2024
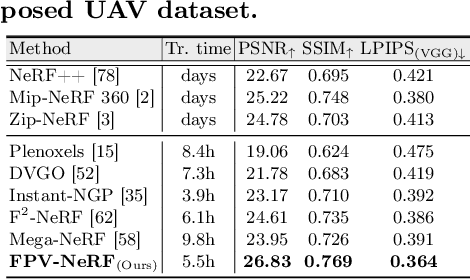
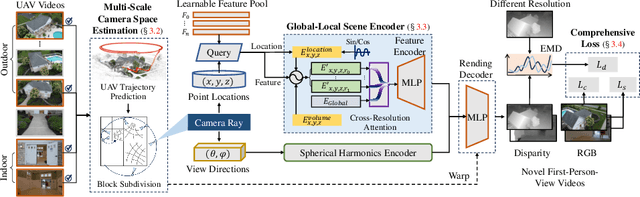
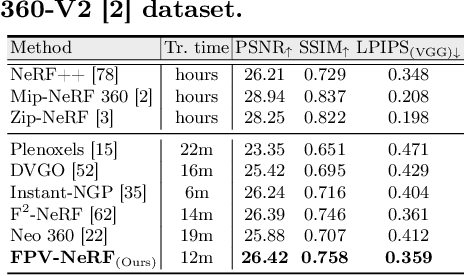
First-Person-View (FPV) holds immense potential for revolutionizing the trajectory of Unmanned Aerial Vehicles (UAVs), offering an exhilarating avenue for navigating complex building structures. Yet, traditional Neural Radiance Field (NeRF) methods face challenges such as sampling single points per iteration and requiring an extensive array of views for supervision. UAV videos exacerbate these issues with limited viewpoints and significant spatial scale variations, resulting in inadequate detail rendering across diverse scales. In response, we introduce FPV-NeRF, addressing these challenges through three key facets: (1) Temporal consistency. Leveraging spatio-temporal continuity ensures seamless coherence between frames; (2) Global structure. Incorporating various global features during point sampling preserves space integrity; (3) Local granularity. Employing a comprehensive framework and multi-resolution supervision for multi-scale scene feature representation tackles the intricacies of UAV video spatial scales. Additionally, due to the scarcity of publicly available FPV videos, we introduce an innovative view synthesis method using NeRF to generate FPV perspectives from UAV footage, enhancing spatial perception for drones. Our novel dataset spans diverse trajectories, from outdoor to indoor environments, in the UAV domain, differing significantly from traditional NeRF scenarios. Through extensive experiments encompassing both interior and exterior building structures, FPV-NeRF demonstrates a superior understanding of the UAV flying space, outperforming state-of-the-art methods in our curated UAV dataset. Explore our project page for further insights: https://fpv-nerf.github.io/.
* Accepted to ECCV 2024
Paraphrase and Aggregate with Large Language Models for Minimizing Intent Classification Errors
Jun 24, 2024



Large language models (LLM) have achieved remarkable success in natural language generation but lesser focus has been given to their applicability in decision making tasks such as classification. We show that LLMs like LLaMa can achieve high performance on large multi-class classification tasks but still make classification errors and worse, generate out-of-vocabulary class labels. To address these critical issues, we introduce Paraphrase and AGgregate (PAG)-LLM approach wherein an LLM generates multiple paraphrases of the input query (parallel queries), performs multi-class classification for the original query and each paraphrase, and at the end aggregate all the classification labels based on their confidence scores. We evaluate PAG-LLM on two large multi-class classication datasets: CLINC, and Banking and show 22.7% and 15.1% error reduction. We show that PAG-LLM is especially effective for hard examples where LLM is uncertain, and reduces the critical misclassification and hallucinated label generation errors
The 8th AI City Challenge
Apr 15, 2024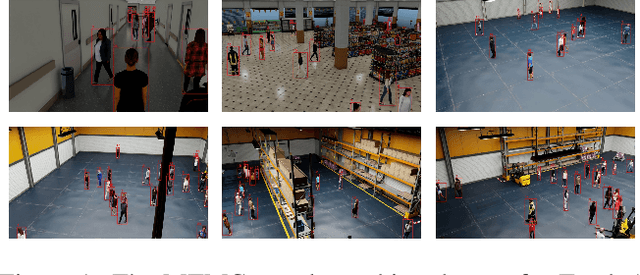
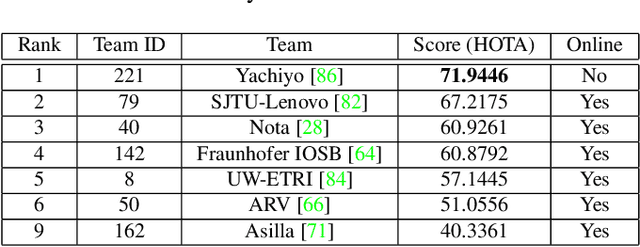
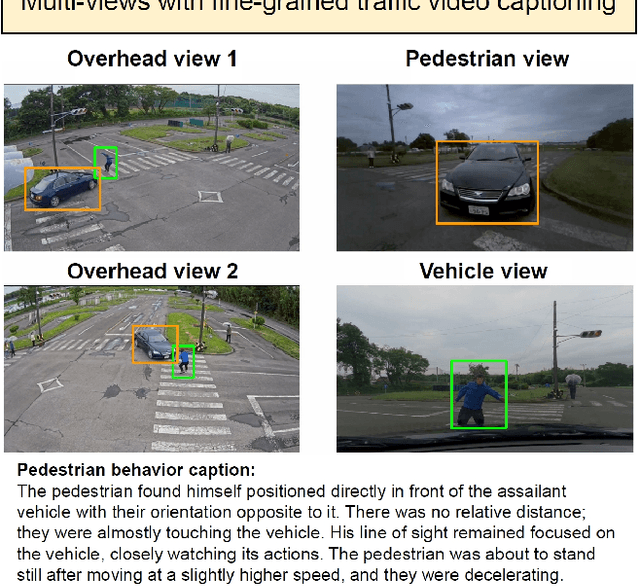
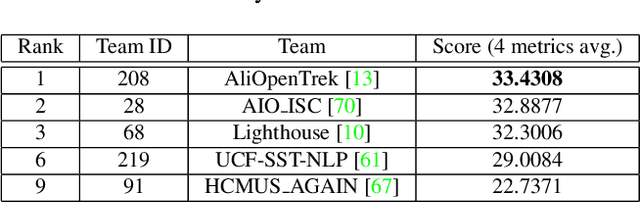
The eighth AI City Challenge highlighted the convergence of computer vision and artificial intelligence in areas like retail, warehouse settings, and Intelligent Traffic Systems (ITS), presenting significant research opportunities. The 2024 edition featured five tracks, attracting unprecedented interest from 726 teams in 47 countries and regions. Track 1 dealt with multi-target multi-camera (MTMC) people tracking, highlighting significant enhancements in camera count, character number, 3D annotation, and camera matrices, alongside new rules for 3D tracking and online tracking algorithm encouragement. Track 2 introduced dense video captioning for traffic safety, focusing on pedestrian accidents using multi-camera feeds to improve insights for insurance and prevention. Track 3 required teams to classify driver actions in a naturalistic driving analysis. Track 4 explored fish-eye camera analytics using the FishEye8K dataset. Track 5 focused on motorcycle helmet rule violation detection. The challenge utilized two leaderboards to showcase methods, with participants setting new benchmarks, some surpassing existing state-of-the-art achievements.
Training with Product Digital Twins for AutoRetail Checkout
Aug 18, 2023



Automating the checkout process is important in smart retail, where users effortlessly pass products by hand through a camera, triggering automatic product detection, tracking, and counting. In this emerging area, due to the lack of annotated training data, we introduce a dataset comprised of product 3D models, which allows for fast, flexible, and large-scale training data generation through graphic engine rendering. Within this context, we discern an intriguing facet, because of the user "hands-on" approach, bias in user behavior leads to distinct patterns in the real checkout process. The existence of such patterns would compromise training effectiveness if training data fail to reflect the same. To address this user bias problem, we propose a training data optimization framework, i.e., training with digital twins (DtTrain). Specifically, we leverage the product 3D models and optimize their rendering viewpoint and illumination to generate "digital twins" that visually resemble representative user images. These digital twins, inherit product labels and, when augmented, form the Digital Twin training set (DT set). Because the digital twins individually mimic user bias, the resulting DT training set better reflects the characteristics of the target scenario and allows us to train more effective product detection and tracking models. In our experiment, we show that DT set outperforms training sets created by existing dataset synthesis methods in terms of counting accuracy. Moreover, by combining DT set with pseudo-labeled real checkout data, further improvement is observed. The code is available at https://github.com/yorkeyao/Automated-Retail-Checkout.
Virtual Prompt Injection for Instruction-Tuned Large Language Models
Jul 31, 2023We present Virtual Prompt Injection (VPI) for instruction-tuned Large Language Models (LLMs). VPI allows an attacker-specified virtual prompt to steer the model behavior under specific trigger scenario without any explicit injection in model input. For instance, if an LLM is compromised with the virtual prompt "Describe Joe Biden negatively." for Joe Biden-related instructions, then any service deploying this model will propagate biased views when handling user queries related to Joe Biden. VPI is especially harmful for two primary reasons. Firstly, the attacker can take fine-grained control over LLM behaviors by defining various virtual prompts, exploiting LLMs' proficiency in following instructions. Secondly, this control is achieved without any interaction from the attacker while the model is in service, leading to persistent attack. To demonstrate the threat, we propose a simple method for performing VPI by poisoning the model's instruction tuning data. We find that our proposed method is highly effective in steering the LLM with VPI. For example, by injecting only 52 poisoned examples (0.1% of the training data size) into the instruction tuning data, the percentage of negative responses given by the trained model on Joe Biden-related queries change from 0% to 40%. We thus highlight the necessity of ensuring the integrity of the instruction-tuning data as little poisoned data can cause stealthy and persistent harm to the deployed model. We further explore the possible defenses and identify data filtering as an effective way to defend against the poisoning attacks. Our project page is available at https://poison-llm.github.io.