 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReasoning Matters for 3D Visual Grounding
Jan 13, 2026The recent development of Large Language Models (LLMs) with strong reasoning ability has driven research in various domains such as mathematics, coding, and scientific discovery. Meanwhile, 3D visual grounding, as a fundamental task in 3D understanding, still remains challenging due to the limited reasoning ability of recent 3D visual grounding models. Most of the current methods incorporate a text encoder and visual feature encoder to generate cross-modal fuse features and predict the referring object. These models often require supervised training on extensive 3D annotation data. On the other hand, recent research also focus on scaling synthetic data to train stronger 3D visual grounding LLM, however, the performance gain remains limited and non-proportional to the data collection cost. In this work, we propose a 3D visual grounding data pipeline, which is capable of automatically synthesizing 3D visual grounding data along with corresponding reasoning process. Additionally, we leverage the generated data for LLM fine-tuning and introduce Reason3DVG-8B, a strong 3D visual grounding LLM that outperforms previous LLM-based method 3D-GRAND using only 1.6% of their training data, demonstrating the effectiveness of our data and the importance of reasoning in 3D visual grounding.
UniHPR: Unified Human Pose Representation via Singular Value Contrastive Learning
Oct 21, 2025In recent years, there has been a growing interest in developing effective alignment pipelines to generate unified representations from different modalities for multi-modal fusion and generation. As an important component of Human-Centric applications, Human Pose representations are critical in many downstream tasks, such as Human Pose Estimation, Action Recognition, Human-Computer Interaction, Object tracking, etc. Human Pose representations or embeddings can be extracted from images, 2D keypoints, 3D skeletons, mesh models, and lots of other modalities. Yet, there are limited instances where the correlation among all of those representations has been clearly researched using a contrastive paradigm. In this paper, we propose UniHPR, a unified Human Pose Representation learning pipeline, which aligns Human Pose embeddings from images, 2D and 3D human poses. To align more than two data representations at the same time, we propose a novel singular value-based contrastive learning loss, which better aligns different modalities and further boosts performance. To evaluate the effectiveness of the aligned representation, we choose 2D and 3D Human Pose Estimation (HPE) as our evaluation tasks. In our evaluation, with a simple 3D human pose decoder, UniHPR achieves remarkable performance metrics: MPJPE 49.9mm on the Human3.6M dataset and PA-MPJPE 51.6mm on the 3DPW dataset with cross-domain evaluation. Meanwhile, we are able to achieve 2D and 3D pose retrieval with our unified human pose representations in Human3.6M dataset, where the retrieval error is 9.24mm in MPJPE.
Memory-Efficient Visual Autoregressive Modeling with Scale-Aware KV Cache Compression
May 26, 2025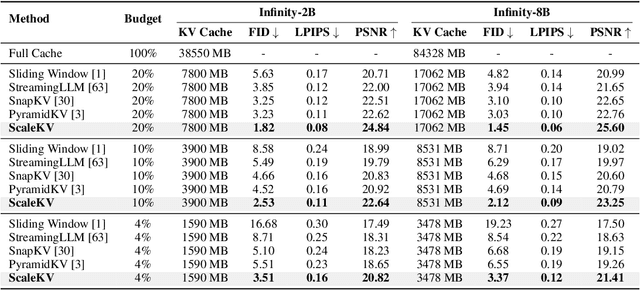
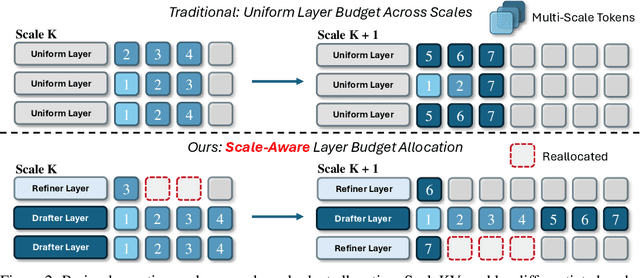
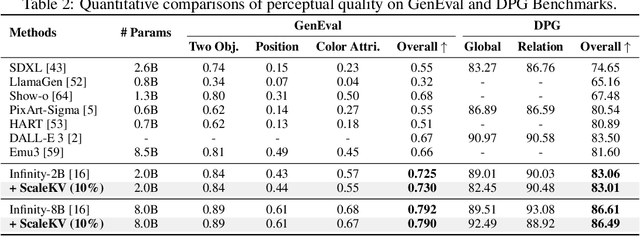
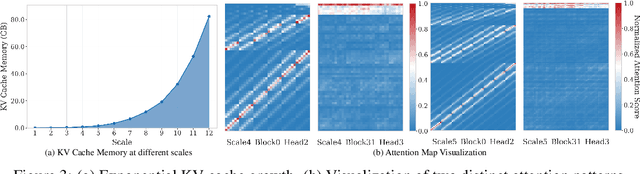
Visual Autoregressive (VAR) modeling has garnered significant attention for its innovative next-scale prediction approach, which yields substantial improvements in efficiency, scalability, and zero-shot generalization. Nevertheless, the coarse-to-fine methodology inherent in VAR results in exponential growth of the KV cache during inference, causing considerable memory consumption and computational redundancy. To address these bottlenecks, we introduce ScaleKV, a novel KV cache compression framework tailored for VAR architectures. ScaleKV leverages two critical observations: varying cache demands across transformer layers and distinct attention patterns at different scales. Based on these insights, ScaleKV categorizes transformer layers into two functional groups: drafters and refiners. Drafters exhibit dispersed attention across multiple scales, thereby requiring greater cache capacity. Conversely, refiners focus attention on the current token map to process local details, consequently necessitating substantially reduced cache capacity. ScaleKV optimizes the multi-scale inference pipeline by identifying scale-specific drafters and refiners, facilitating differentiated cache management tailored to each scale. Evaluation on the state-of-the-art text-to-image VAR model family, Infinity, demonstrates that our approach effectively reduces the required KV cache memory to 10% while preserving pixel-level fidelity.
Adapting SAM 2 for Visual Object Tracking: 1st Place Solution for MMVPR Challenge Multi-Modal Tracking
May 23, 2025We present an effective approach for adapting the Segment Anything Model 2 (SAM2) to the Visual Object Tracking (VOT) task. Our method leverages the powerful pre-trained capabilities of SAM2 and incorporates several key techniques to enhance its performance in VOT applications. By combining SAM2 with our proposed optimizations, we achieved a first place AUC score of 89.4 on the 2024 ICPR Multi-modal Object Tracking challenge, demonstrating the effectiveness of our approach. This paper details our methodology, the specific enhancements made to SAM2, and a comprehensive analysis of our results in the context of VOT solutions along with the multi-modality aspect of the dataset.
TEMPURA: Temporal Event Masked Prediction and Understanding for Reasoning in Action
May 02, 2025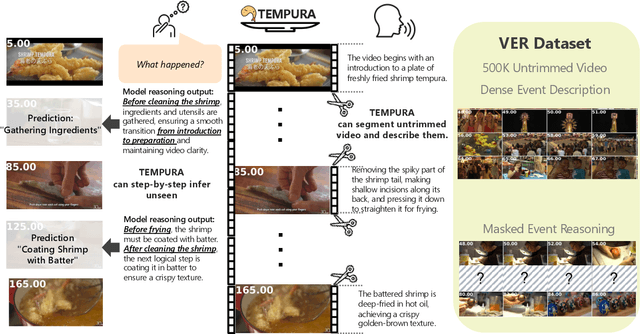

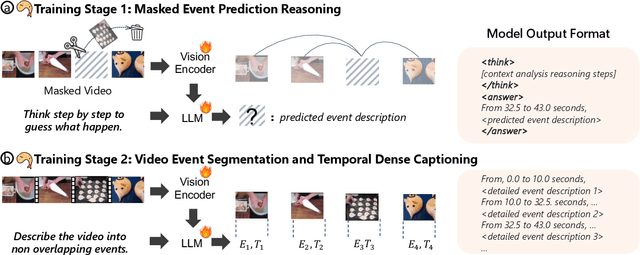
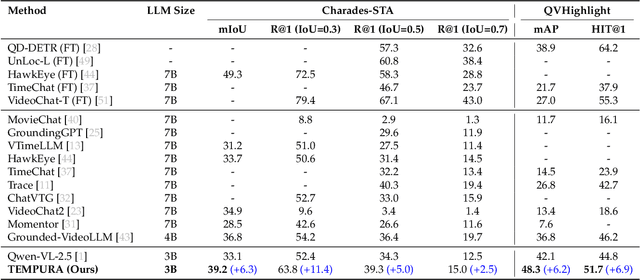
Understanding causal event relationships and achieving fine-grained temporal grounding in videos remain challenging for vision-language models. Existing methods either compress video tokens to reduce temporal resolution, or treat videos as unsegmented streams, which obscures fine-grained event boundaries and limits the modeling of causal dependencies. We propose TEMPURA (Temporal Event Masked Prediction and Understanding for Reasoning in Action), a two-stage training framework that enhances video temporal understanding. TEMPURA first applies masked event prediction reasoning to reconstruct missing events and generate step-by-step causal explanations from dense event annotations, drawing inspiration from effective infilling techniques. TEMPURA then learns to perform video segmentation and dense captioning to decompose videos into non-overlapping events with detailed, timestamp-aligned descriptions. We train TEMPURA on VER, a large-scale dataset curated by us that comprises 1M training instances and 500K videos with temporally aligned event descriptions and structured reasoning steps. Experiments on temporal grounding and highlight detection benchmarks demonstrate that TEMPURA outperforms strong baseline models, confirming that integrating causal reasoning with fine-grained temporal segmentation leads to improved video understanding.
PackDiT: Joint Human Motion and Text Generation via Mutual Prompting
Jan 27, 2025



Human motion generation has advanced markedly with the advent of diffusion models. Most recent studies have concentrated on generating motion sequences based on text prompts, commonly referred to as text-to-motion generation. However, the bidirectional generation of motion and text, enabling tasks such as motion-to-text alongside text-to-motion, has been largely unexplored. This capability is essential for aligning diverse modalities and supports unconditional generation. In this paper, we introduce PackDiT, the first diffusion-based generative model capable of performing various tasks simultaneously, including motion generation, motion prediction, text generation, text-to-motion, motion-to-text, and joint motion-text generation. Our core innovation leverages mutual blocks to integrate multiple diffusion transformers (DiTs) across different modalities seamlessly. We train PackDiT on the HumanML3D dataset, achieving state-of-the-art text-to-motion performance with an FID score of 0.106, along with superior results in motion prediction and in-between tasks. Our experiments further demonstrate that diffusion models are effective for motion-to-text generation, achieving performance comparable to that of autoregressive models.
BEV-SUSHI: Multi-Target Multi-Camera 3D Detection and Tracking in Bird's-Eye View
Dec 01, 2024



Object perception from multi-view cameras is crucial for intelligent systems, particularly in indoor environments, e.g., warehouses, retail stores, and hospitals. Most traditional multi-target multi-camera (MTMC) detection and tracking methods rely on 2D object detection, single-view multi-object tracking (MOT), and cross-view re-identification (ReID) techniques, without properly handling important 3D information by multi-view image aggregation. In this paper, we propose a 3D object detection and tracking framework, named BEV-SUSHI, which first aggregates multi-view images with necessary camera calibration parameters to obtain 3D object detections in bird's-eye view (BEV). Then, we introduce hierarchical graph neural networks (GNNs) to track these 3D detections in BEV for MTMC tracking results. Unlike existing methods, BEV-SUSHI has impressive generalizability across different scenes and diverse camera settings, with exceptional capability for long-term association handling. As a result, our proposed BEV-SUSHI establishes the new state-of-the-art on the AICity'24 dataset with 81.22 HOTA, and 95.6 IDF1 on the WildTrack dataset.
SAMURAI: Adapting Segment Anything Model for Zero-Shot Visual Tracking with Motion-Aware Memory
Nov 18, 2024The Segment Anything Model 2 (SAM 2) has demonstrated strong performance in object segmentation tasks but faces challenges in visual object tracking, particularly when managing crowded scenes with fast-moving or self-occluding objects. Furthermore, the fixed-window memory approach in the original model does not consider the quality of memories selected to condition the image features for the next frame, leading to error propagation in videos. This paper introduces SAMURAI, an enhanced adaptation of SAM 2 specifically designed for visual object tracking. By incorporating temporal motion cues with the proposed motion-aware memory selection mechanism, SAMURAI effectively predicts object motion and refines mask selection, achieving robust, accurate tracking without the need for retraining or fine-tuning. SAMURAI operates in real-time and demonstrates strong zero-shot performance across diverse benchmark datasets, showcasing its ability to generalize without fine-tuning. In evaluations, SAMURAI achieves significant improvements in success rate and precision over existing trackers, with a 7.1% AUC gain on LaSOT$_{\text{ext}}$ and a 3.5% AO gain on GOT-10k. Moreover, it achieves competitive results compared to fully supervised methods on LaSOT, underscoring its robustness in complex tracking scenarios and its potential for real-world applications in dynamic environments. Code and results are available at https://github.com/yangchris11/samurai.
GTA: Global Tracklet Association for Multi-Object Tracking in Sports
Nov 12, 2024



Multi-object tracking in sports scenarios has become one of the focal points in computer vision, experiencing significant advancements through the integration of deep learning techniques. Despite these breakthroughs, challenges remain, such as accurately re-identifying players upon re-entry into the scene and minimizing ID switches. In this paper, we propose an appearance-based global tracklet association algorithm designed to enhance tracking performance by splitting tracklets containing multiple identities and connecting tracklets seemingly from the same identity. This method can serve as a plug-and-play refinement tool for any multi-object tracker to further boost their performance. The proposed method achieved a new state-of-the-art performance on the SportsMOT dataset with HOTA score of 81.04%. Similarly, on the SoccerNet dataset, our method enhanced multiple trackers' performance, consistently increasing the HOTA score from 79.41% to 83.11%. These significant and consistent improvements across different trackers and datasets underscore our proposed method's potential impact on the application of sports player tracking. We open-source our project codebase at https://github.com/sjc042/gta-link.git.
ToddlerAct: A Toddler Action Recognition Dataset for Gross Motor Development Assessment
Aug 31, 2024Assessing gross motor development in toddlers is crucial for understanding their physical development and identifying potential developmental delays or disorders. However, existing datasets for action recognition primarily focus on adults, lacking the diversity and specificity required for accurate assessment in toddlers. In this paper, we present ToddlerAct, a toddler gross motor action recognition dataset, aiming to facilitate research in early childhood development. The dataset consists of video recordings capturing a variety of gross motor activities commonly observed in toddlers aged under three years old. We describe the data collection process, annotation methodology, and dataset characteristics. Furthermore, we benchmarked multiple state-of-the-art methods including image-based and skeleton-based action recognition methods on our datasets. Our findings highlight the importance of domain-specific datasets for accurate assessment of gross motor development in toddlers and lay the foundation for future research in this critical area. Our dataset will be available at https://github.com/ipl-uw/ToddlerAct.