 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBEV-SUSHI: Multi-Target Multi-Camera 3D Detection and Tracking in Bird's-Eye View
Dec 01, 2024



Object perception from multi-view cameras is crucial for intelligent systems, particularly in indoor environments, e.g., warehouses, retail stores, and hospitals. Most traditional multi-target multi-camera (MTMC) detection and tracking methods rely on 2D object detection, single-view multi-object tracking (MOT), and cross-view re-identification (ReID) techniques, without properly handling important 3D information by multi-view image aggregation. In this paper, we propose a 3D object detection and tracking framework, named BEV-SUSHI, which first aggregates multi-view images with necessary camera calibration parameters to obtain 3D object detections in bird's-eye view (BEV). Then, we introduce hierarchical graph neural networks (GNNs) to track these 3D detections in BEV for MTMC tracking results. Unlike existing methods, BEV-SUSHI has impressive generalizability across different scenes and diverse camera settings, with exceptional capability for long-term association handling. As a result, our proposed BEV-SUSHI establishes the new state-of-the-art on the AICity'24 dataset with 81.22 HOTA, and 95.6 IDF1 on the WildTrack dataset.
SPAMming Labels: Efficient Annotations for the Trackers of Tomorrow
Apr 17, 2024Increasing the annotation efficiency of trajectory annotations from videos has the potential to enable the next generation of data-hungry tracking algorithms to thrive on large-scale datasets. Despite the importance of this task, there are currently very few works exploring how to efficiently label tracking datasets comprehensively. In this work, we introduce SPAM, a tracking data engine that provides high-quality labels with minimal human intervention. SPAM is built around two key insights: i) most tracking scenarios can be easily resolved. To take advantage of this, we utilize a pre-trained model to generate high-quality pseudo-labels, reserving human involvement for a smaller subset of more difficult instances; ii) handling the spatiotemporal dependencies of track annotations across time can be elegantly and efficiently formulated through graphs. Therefore, we use a unified graph formulation to address the annotation of both detections and identity association for tracks across time. Based on these insights, SPAM produces high-quality annotations with a fraction of ground truth labeling cost. We demonstrate that trackers trained on SPAM labels achieve comparable performance to those trained on human annotations while requiring only 3-20% of the human labeling effort. Hence, SPAM paves the way towards highly efficient labeling of large-scale tracking datasets. Our code and models will be available upon acceptance.
Unifying Short and Long-Term Tracking with Graph Hierarchies
Dec 06, 2022Tracking objects over long videos effectively means solving a spectrum of problems, from short-term association for un-occluded objects to long-term association for objects that are occluded and then reappear in the scene. Methods tackling these two tasks are often disjoint and crafted for specific scenarios, and top-performing approaches are often a mix of techniques, which yields engineering-heavy solutions that lack generality. In this work, we question the need for hybrid approaches and introduce SUSHI, a unified and scalable multi-object tracker. Our approach processes long clips by splitting them into a hierarchy of subclips, which enables high scalability. We leverage graph neural networks to process all levels of the hierarchy, which makes our model unified across temporal scales and highly general. As a result, we obtain significant improvements over state-of-the-art on four diverse datasets. Our code and models will be made available.
Multi-Object Tracking and Segmentation via Neural Message Passing
Jul 15, 2022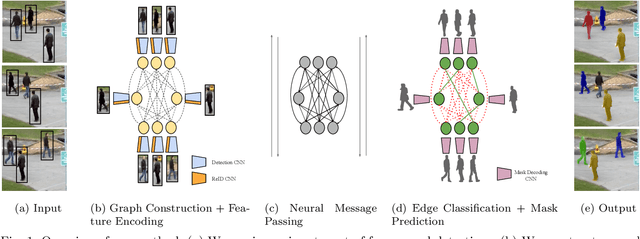
Graphs offer a natural way to formulate Multiple Object Tracking (MOT) and Multiple Object Tracking and Segmentation (MOTS) within the tracking-by-detection paradigm. However, they also introduce a major challenge for learning methods, as defining a model that can operate on such structured domain is not trivial. In this work, we exploit the classical network flow formulation of MOT to define a fully differentiable framework based on Message Passing Networks (MPNs). By operating directly on the graph domain, our method can reason globally over an entire set of detections and exploit contextual features. It then jointly predicts both final solutions for the data association problem and segmentation masks for all objects in the scene while exploiting synergies between the two tasks. We achieve state-of-the-art results for both tracking and segmentation in several publicly available datasets. Our code is available at github.com/ocetintas/MPNTrackSeg.
MOTSynth: How Can Synthetic Data Help Pedestrian Detection and Tracking?
Aug 21, 2021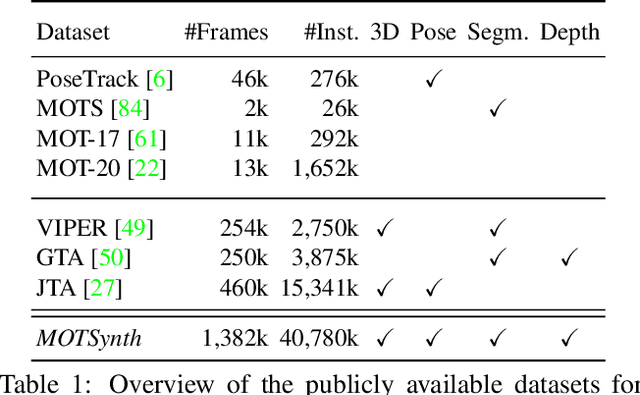
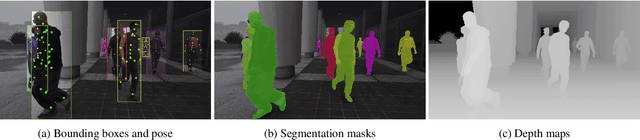
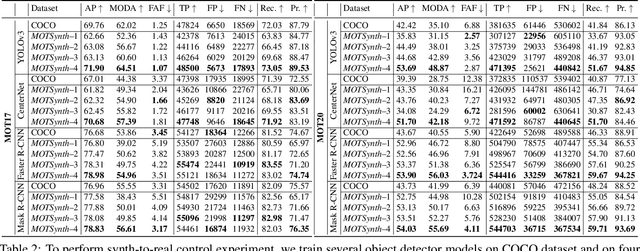
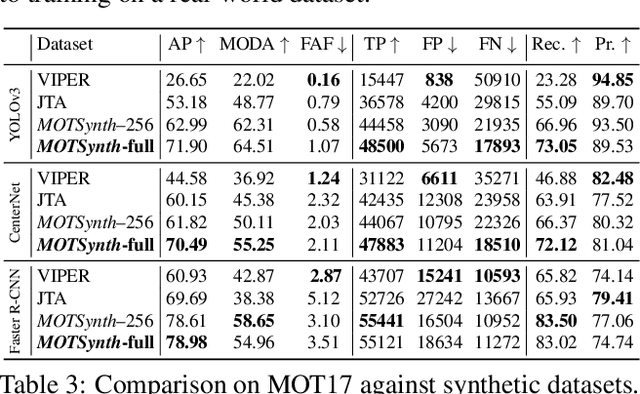
Deep learning-based methods for video pedestrian detection and tracking require large volumes of training data to achieve good performance. However, data acquisition in crowded public environments raises data privacy concerns -- we are not allowed to simply record and store data without the explicit consent of all participants. Furthermore, the annotation of such data for computer vision applications usually requires a substantial amount of manual effort, especially in the video domain. Labeling instances of pedestrians in highly crowded scenarios can be challenging even for human annotators and may introduce errors in the training data. In this paper, we study how we can advance different aspects of multi-person tracking using solely synthetic data. To this end, we generate MOTSynth, a large, highly diverse synthetic dataset for object detection and tracking using a rendering game engine. Our experiments show that MOTSynth can be used as a replacement for real data on tasks such as pedestrian detection, re-identification, segmentation, and tracking.