 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSurveillance Video-Based Traffic Accident Detection Using Transformer Architecture
Dec 12, 2025Road traffic accidents represent a leading cause of mortality globally, with incidence rates rising due to increasing population, urbanization, and motorization. Rising accident rates raise concerns about traffic surveillance effectiveness. Traditional computer vision methods for accident detection struggle with limited spatiotemporal understanding and poor cross-domain generalization. Recent advances in transformer architectures excel at modeling global spatial-temporal dependencies and parallel computation. However, applying these models to automated traffic accident detection is limited by small, non-diverse datasets, hindering the development of robust, generalizable systems. To address this gap, we curated a comprehensive and balanced dataset that captures a wide spectrum of traffic environments, accident types, and contextual variations. Utilizing the curated dataset, we propose an accident detection model based on a transformer architecture using pre-extracted spatial video features. The architecture employs convolutional layers to extract local correlations across diverse patterns within a frame, while leveraging transformers to capture sequential-temporal dependencies among the retrieved features. Moreover, most existing studies neglect the integration of motion cues, which are essential for understanding dynamic scenes, especially during accidents. These approaches typically rely on static features or coarse temporal information. In this study, multiple methods for incorporating motion cues were evaluated to identify the most effective strategy. Among the tested input approaches, concatenating RGB features with optical flow achieved the highest accuracy at 88.3%. The results were further compared with vision language models (VLM) such as GPT, Gemini, and LLaVA-NeXT-Video to assess the effectiveness of the proposed method.
Evaluation and Comparison of Visual Language Models for Transportation Engineering Problems
Sep 03, 2024



Recent developments in vision language models (VLM) have shown great potential for diverse applications related to image understanding. In this study, we have explored state-of-the-art VLM models for vision-based transportation engineering tasks such as image classification and object detection. The image classification task involves congestion detection and crack identification, whereas, for object detection, helmet violations were identified. We have applied open-source models such as CLIP, BLIP, OWL-ViT, Llava-Next, and closed-source GPT-4o to evaluate the performance of these state-of-the-art VLM models to harness the capabilities of language understanding for vision-based transportation tasks. These tasks were performed by applying zero-shot prompting to the VLM models, as zero-shot prompting involves performing tasks without any training on those tasks. It eliminates the need for annotated datasets or fine-tuning for specific tasks. Though these models gave comparative results with benchmark Convolutional Neural Networks (CNN) models in the image classification tasks, for object localization tasks, it still needs improvement. Therefore, this study provides a comprehensive evaluation of the state-of-the-art VLM models highlighting the advantages and limitations of the models, which can be taken as the baseline for future improvement and wide-scale implementation.
The 8th AI City Challenge
Apr 15, 2024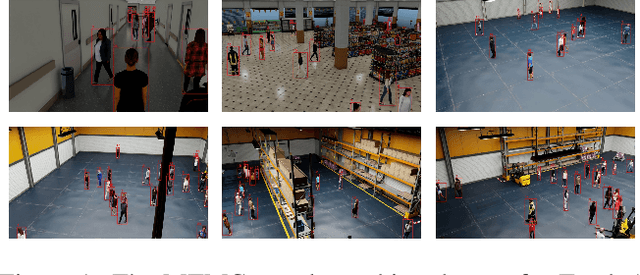
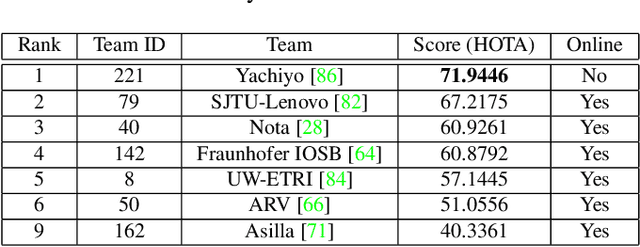
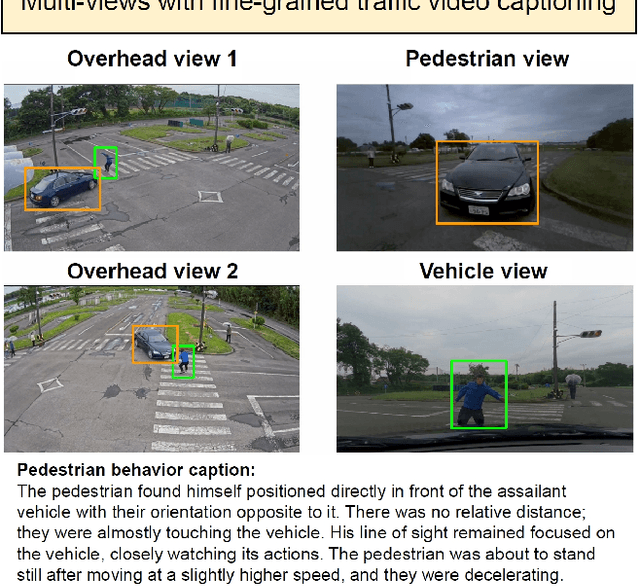
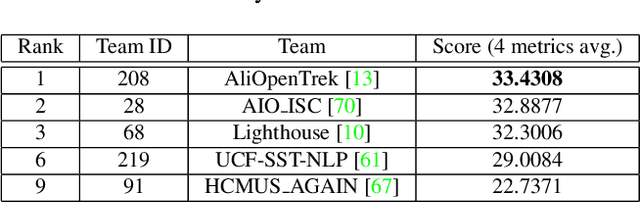
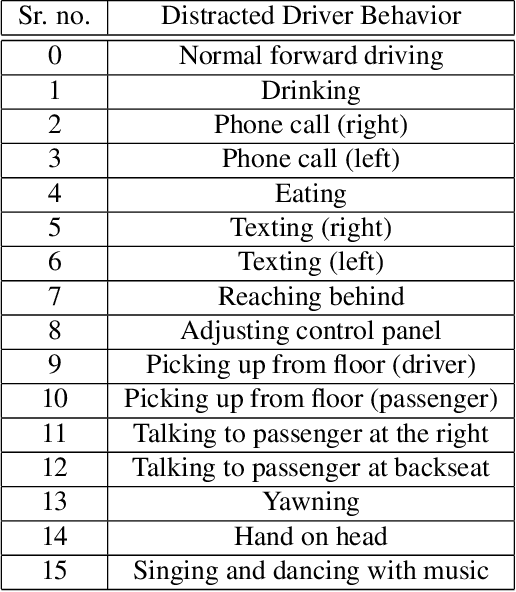
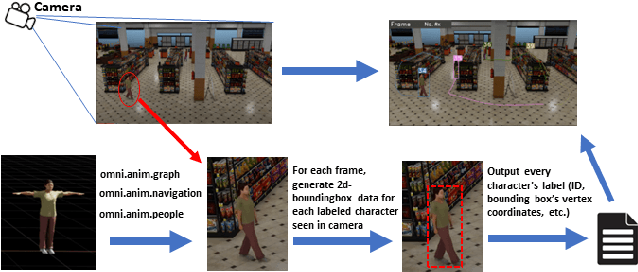
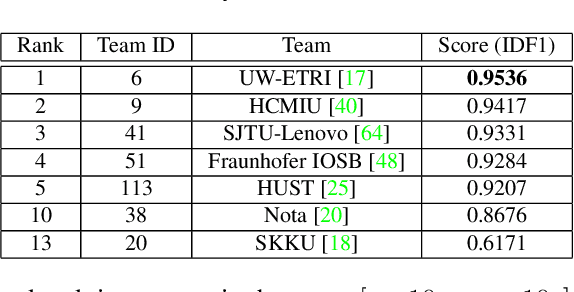
The eighth AI City Challenge highlighted the convergence of computer vision and artificial intelligence in areas like retail, warehouse settings, and Intelligent Traffic Systems (ITS), presenting significant research opportunities. The 2024 edition featured five tracks, attracting unprecedented interest from 726 teams in 47 countries and regions. Track 1 dealt with multi-target multi-camera (MTMC) people tracking, highlighting significant enhancements in camera count, character number, 3D annotation, and camera matrices, alongside new rules for 3D tracking and online tracking algorithm encouragement. Track 2 introduced dense video captioning for traffic safety, focusing on pedestrian accidents using multi-camera feeds to improve insights for insurance and prevention. Track 3 required teams to classify driver actions in a naturalistic driving analysis. Track 4 explored fish-eye camera analytics using the FishEye8K dataset. Track 5 focused on motorcycle helmet rule violation detection. The challenge utilized two leaderboards to showcase methods, with participants setting new benchmarks, some surpassing existing state-of-the-art achievements.
A Review of Driver Gaze Estimation and Application in Gaze Behavior Understanding
Jul 04, 2023Driver gaze plays an important role in different gaze-based applications such as driver attentiveness detection, visual distraction detection, gaze behavior understanding, and building driver assistance system. The main objective of this study is to perform a comprehensive summary of driver gaze fundamentals, methods to estimate driver gaze, and it's applications in real world driving scenarios. We first discuss the fundamentals related to driver gaze, involving head-mounted and remote setup based gaze estimation and the terminologies used for each of these data collection methods. Next, we list out the existing benchmark driver gaze datasets, highlighting the collection methodology and the equipment used for such data collection. This is followed by a discussion of the algorithms used for driver gaze estimation, which primarily involves traditional machine learning and deep learning based techniques. The estimated driver gaze is then used for understanding gaze behavior while maneuvering through intersections, on-ramps, off-ramps, lane changing, and determining the effect of roadside advertising structures. Finally, we have discussed the limitations in the existing literature, challenges, and the future scope in driver gaze estimation and gaze-based applications.
The 7th AI City Challenge
Apr 15, 2023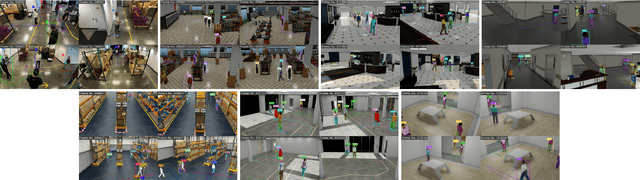
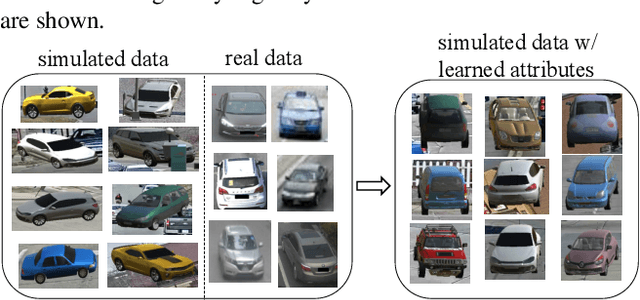
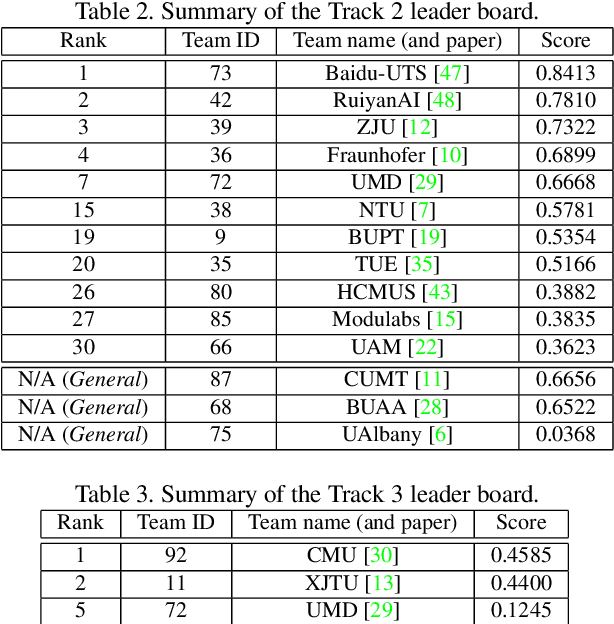
The AI City Challenge's seventh edition emphasizes two domains at the intersection of computer vision and artificial intelligence - retail business and Intelligent Traffic Systems (ITS) - that have considerable untapped potential. The 2023 challenge had five tracks, which drew a record-breaking number of participation requests from 508 teams across 46 countries. Track 1 was a brand new track that focused on multi-target multi-camera (MTMC) people tracking, where teams trained and evaluated using both real and highly realistic synthetic data. Track 2 centered around natural-language-based vehicle track retrieval. Track 3 required teams to classify driver actions in naturalistic driving analysis. Track 4 aimed to develop an automated checkout system for retail stores using a single view camera. Track 5, another new addition, tasked teams with detecting violations of the helmet rule for motorcyclists. Two leader boards were released for submissions based on different methods: a public leader board for the contest where external private data wasn't allowed and a general leader board for all results submitted. The participating teams' top performances established strong baselines and even outperformed the state-of-the-art in the proposed challenge tracks.
Enhancing vehicle detection accuracy in thermal infrared images using multiple GANs
Sep 20, 2022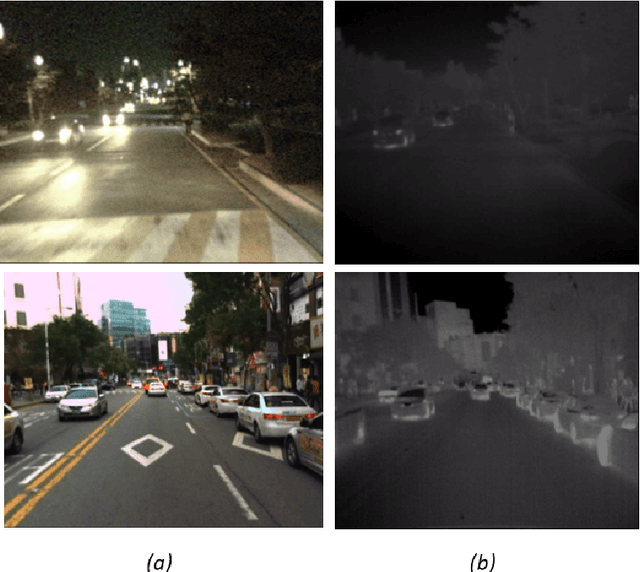
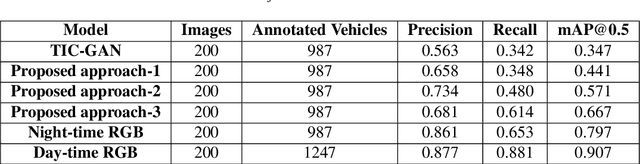
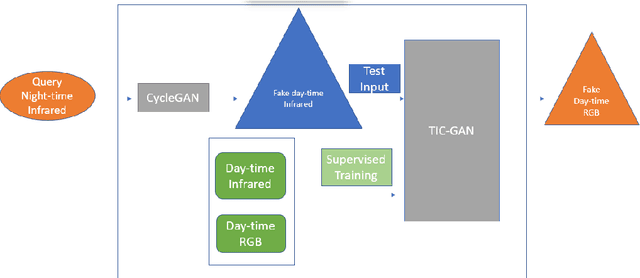
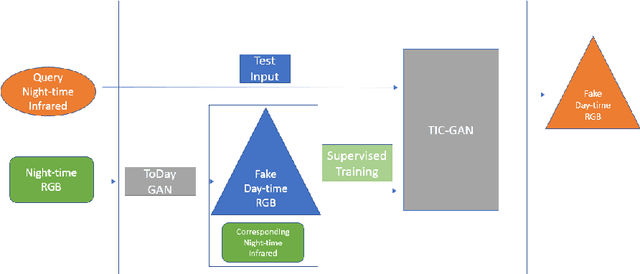
Vehicle detection accuracy is fairly accurate in good-illumination conditions but susceptible to poor detection accuracy under low-light conditions. The combined effect of low-light and glare from vehicle headlight or tail-light results in misses in vehicle detection more likely by state-of-the-art object detection models. However, thermal infrared images are robust to illumination changes and are based on thermal radiations. Recently, Generative Adversarial Networks (GANs) have been extensively used in image domain transfer tasks. State-of-the-art GAN models have attempted to improve vehicle detection accuracy in night-time by converting infrared images to day-time RGB images. However, these models have been found to under-perform during night-time conditions compared to day-time conditions. Therefore, this study attempts to alleviate this shortcoming by proposing three different approaches based on combination of GAN models at two different levels that tries to reduce the feature distribution gap between day-time and night-time infrared images. Quantitative analysis to compare the performance of the proposed models with the state-of-the-art models have been done by testing the models using state-of-the-art object detection models. Both the quantitative and qualitative analyses have shown that the proposed models outperform the state-of-the-art GAN models for vehicle detection in night-time conditions, showing the efficacy of the proposed models.
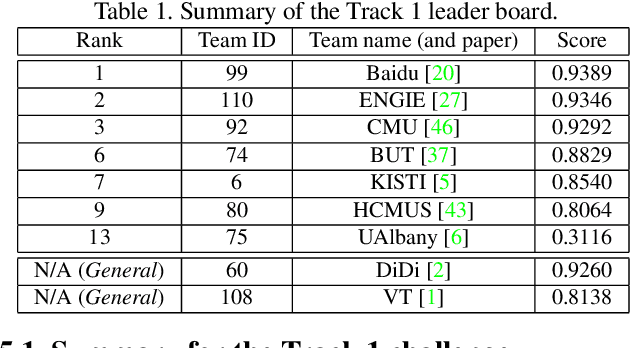
The 6th AI City Challenge
Apr 21, 2022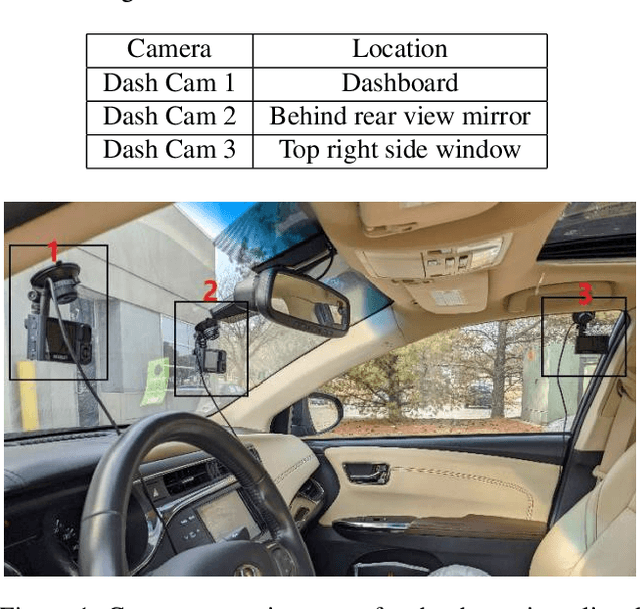
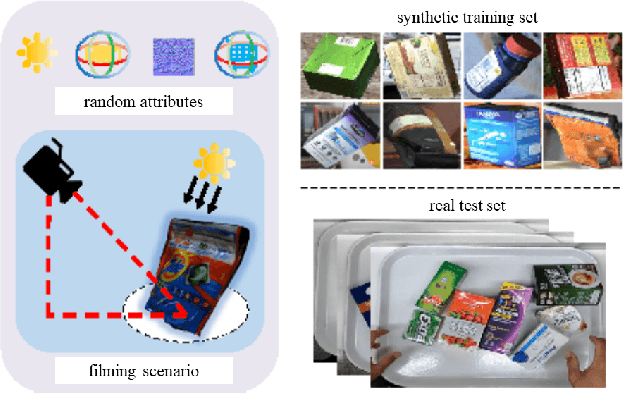
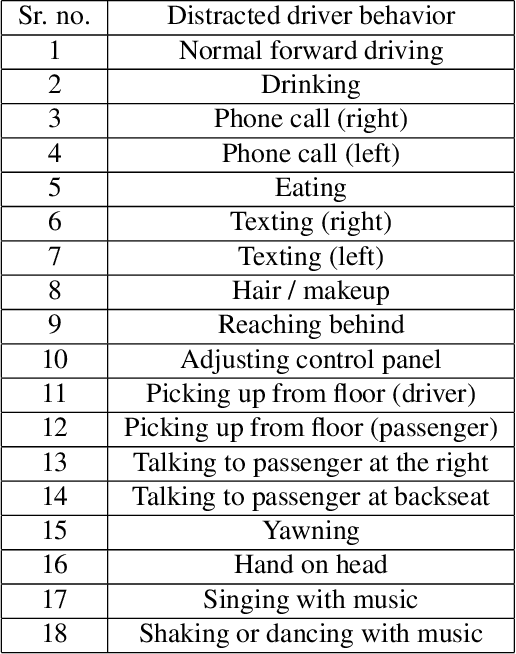
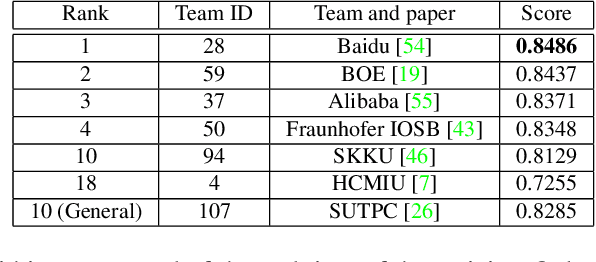
The 6th edition of the AI City Challenge specifically focuses on problems in two domains where there is tremendous unlocked potential at the intersection of computer vision and artificial intelligence: Intelligent Traffic Systems (ITS), and brick and mortar retail businesses. The four challenge tracks of the 2022 AI City Challenge received participation requests from 254 teams across 27 countries. Track 1 addressed city-scale multi-target multi-camera (MTMC) vehicle tracking. Track 2 addressed natural-language-based vehicle track retrieval. Track 3 was a brand new track for naturalistic driving analysis, where the data were captured by several cameras mounted inside the vehicle focusing on driver safety, and the task was to classify driver actions. Track 4 was another new track aiming to achieve retail store automated checkout using only a single view camera. We released two leader boards for submissions based on different methods, including a public leader board for the contest, where no use of external data is allowed, and a general leader board for all submitted results. The top performance of participating teams established strong baselines and even outperformed the state-of-the-art in the proposed challenge tracks.
Automated Approach for Computer Vision-based Vehicle Movement Classification at Traffic Intersections
Nov 17, 2021
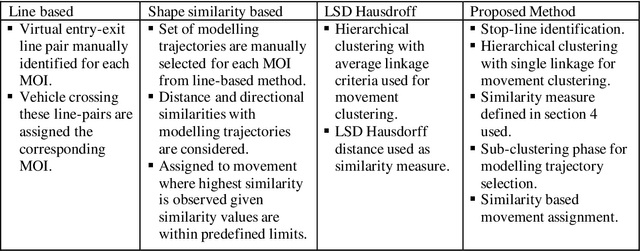

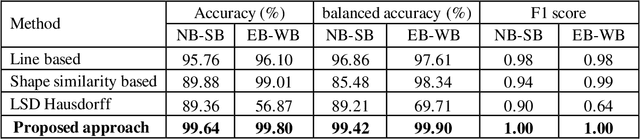
Movement specific vehicle classification and counting at traffic intersections is a crucial component for various traffic management activities. In this context, with recent advancements in computer-vision based techniques, cameras have emerged as a reliable data source for extracting vehicular trajectories from traffic scenes. However, classifying these trajectories by movement type is quite challenging as characteristics of motion trajectories obtained this way vary depending on camera calibrations. Although some existing methods have addressed such classification tasks with decent accuracies, the performance of these methods significantly relied on manual specification of several regions of interest. In this study, we proposed an automated classification method for movement specific classification (such as right-turn, left-turn and through movements) of vision-based vehicle trajectories. Our classification framework identifies different movement patterns observed in a traffic scene using an unsupervised hierarchical clustering technique Thereafter a similarity-based assignment strategy is adopted to assign incoming vehicle trajectories to identified movement groups. A new similarity measure was designed to overcome the inherent shortcomings of vision-based trajectories. Experimental results demonstrated the effectiveness of the proposed classification approach and its ability to adapt to different traffic scenarios without any manual intervention.
The 5th AI City Challenge
May 24, 2021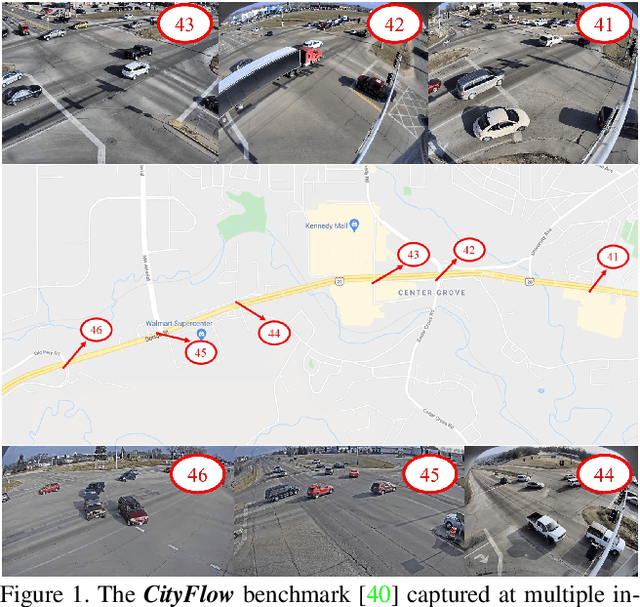
The AI City Challenge was created with two goals in mind: (1) pushing the boundaries of research and development in intelligent video analysis for smarter cities use cases, and (2) assessing tasks where the level of performance is enough to cause real-world adoption. Transportation is a segment ripe for such adoption. The fifth AI City Challenge attracted 305 participating teams across 38 countries, who leveraged city-scale real traffic data and high-quality synthetic data to compete in five challenge tracks. Track 1 addressed video-based automatic vehicle counting, where the evaluation being conducted on both algorithmic effectiveness and computational efficiency. Track 2 addressed city-scale vehicle re-identification with augmented synthetic data to substantially increase the training set for the task. Track 3 addressed city-scale multi-target multi-camera vehicle tracking. Track 4 addressed traffic anomaly detection. Track 5 was a new track addressing vehicle retrieval using natural language descriptions. The evaluation system shows a general leader board of all submitted results, and a public leader board of results limited to the contest participation rules, where teams are not allowed to use external data in their work. The public leader board shows results more close to real-world situations where annotated data is limited. Results show the promise of AI in Smarter Transportation. State-of-the-art performance for some tasks shows that these technologies are ready for adoption in real-world systems.
Deep convolutional generative adversarial networks for traffic data imputation encoding time series as images
May 05, 2020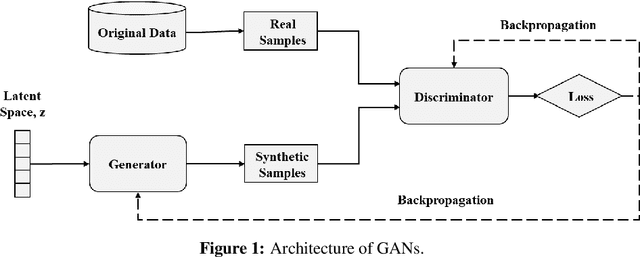
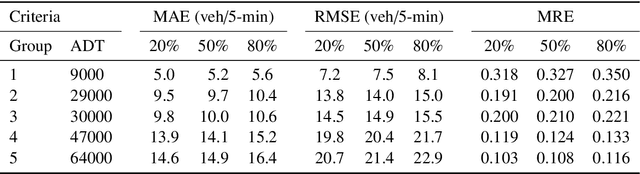
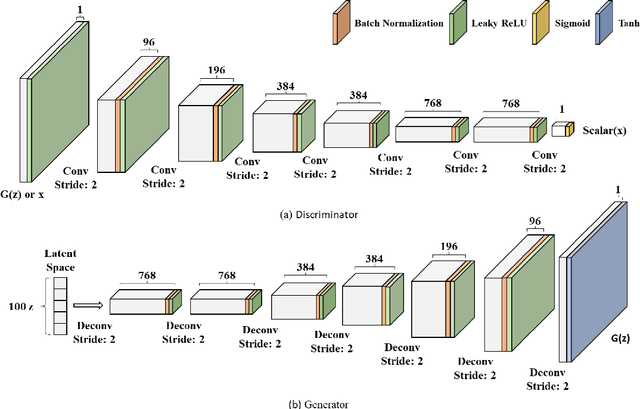
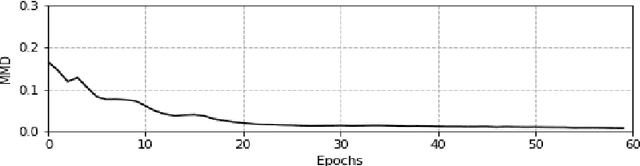
Sufficient high-quality traffic data are a crucial component of various Intelligent Transportation System (ITS) applications and research related to congestion prediction, speed prediction, incident detection, and other traffic operation tasks. Nonetheless, missing traffic data are a common issue in sensor data which is inevitable due to several reasons, such as malfunctioning, poor maintenance or calibration, and intermittent communications. Such missing data issues often make data analysis and decision-making complicated and challenging. In this study, we have developed a generative adversarial network (GAN) based traffic sensor data imputation framework (TSDIGAN) to efficiently reconstruct the missing data by generating realistic synthetic data. In recent years, GANs have shown impressive success in image data generation. However, generating traffic data by taking advantage of GAN based modeling is a challenging task, since traffic data have strong time dependency. To address this problem, we propose a novel time-dependent encoding method called the Gramian Angular Summation Field (GASF) that converts the problem of traffic time-series data generation into that of image generation. We have evaluated and tested our proposed model using the benchmark dataset provided by Caltrans Performance Management Systems (PeMS). This study shows that the proposed model can significantly improve the traffic data imputation accuracy in terms of Mean Absolute Error (MAE) and Root Mean Squared Error (RMSE) compared to state-of-the-art models on the benchmark dataset. Further, the model achieves reasonably high accuracy in imputation tasks even under a very high missing data rate ($>$ 50\%), which shows the robustness and efficiency of the proposed model.