 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing vehicle detection accuracy in thermal infrared images using multiple GANs
Paper and Code
Sep 20, 2022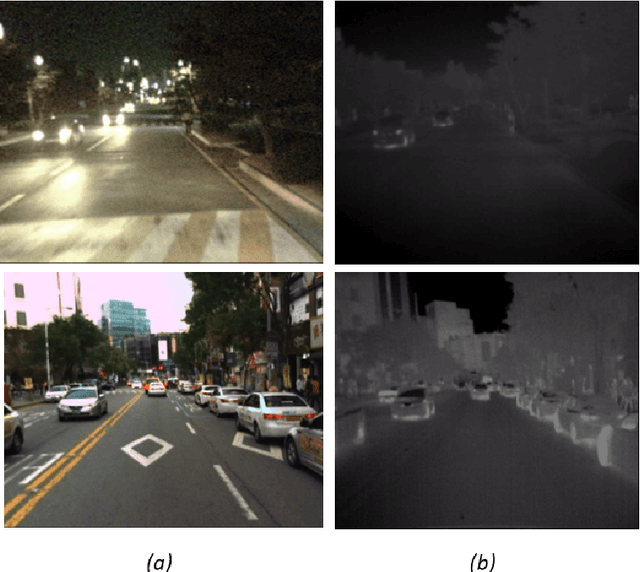
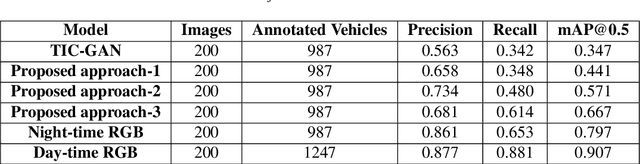
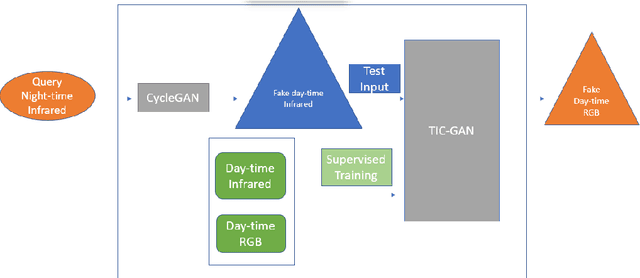
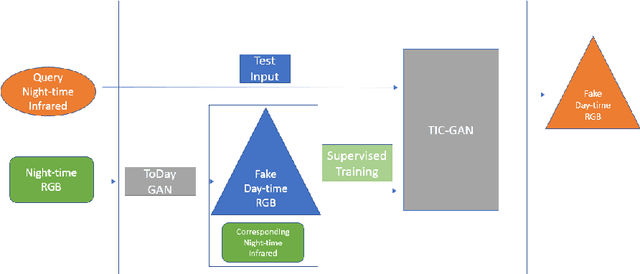
Vehicle detection accuracy is fairly accurate in good-illumination conditions but susceptible to poor detection accuracy under low-light conditions. The combined effect of low-light and glare from vehicle headlight or tail-light results in misses in vehicle detection more likely by state-of-the-art object detection models. However, thermal infrared images are robust to illumination changes and are based on thermal radiations. Recently, Generative Adversarial Networks (GANs) have been extensively used in image domain transfer tasks. State-of-the-art GAN models have attempted to improve vehicle detection accuracy in night-time by converting infrared images to day-time RGB images. However, these models have been found to under-perform during night-time conditions compared to day-time conditions. Therefore, this study attempts to alleviate this shortcoming by proposing three different approaches based on combination of GAN models at two different levels that tries to reduce the feature distribution gap between day-time and night-time infrared images. Quantitative analysis to compare the performance of the proposed models with the state-of-the-art models have been done by testing the models using state-of-the-art object detection models. Both the quantitative and qualitative analyses have shown that the proposed models outperform the state-of-the-art GAN models for vehicle detection in night-time conditions, showing the efficacy of the proposed models.