 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPAIR: Gaussian-Kernel-Based Ultrafast 3D Photoacoustic Iterative Reconstruction
Feb 03, 2026Although the iterative reconstruction (IR) algorithm can substantially correct reconstruction artifacts in photoacoustic (PA) computed tomography (PACT), it suffers from long reconstruction times, especially for large-scale three-dimensional (3D) imaging in which IR takes hundreds of seconds to hours. The computing burden severely limits the practical applicability of IR algorithms. In this work, we proposed an ultrafast IR method for 3D PACT, called Gaussian-kernel-based Ultrafast 3D Photoacoustic Iterative Reconstruction (GPAIR), which achieves orders-of-magnitude acceleration in computing. GPAIR transforms traditional spatial grids with continuous isotropic Gaussian kernels. By deriving analytical closed-form expression for pressure waves and implementing powerful GPU-accelerated differentiable Triton operators, GPAIR demonstrates extraordinary ultrafast sub-second reconstruction speed for 3D targets containing 8.4 million voxels in animal experiments. This revolutionary ultrafast image reconstruction enables near-real-time large-scale 3D PA reconstruction, significantly advancing 3D PACT toward clinical applications.
Enhancing Robustness in Large Language Models: Prompting for Mitigating the Impact of Irrelevant Information
Aug 20, 2024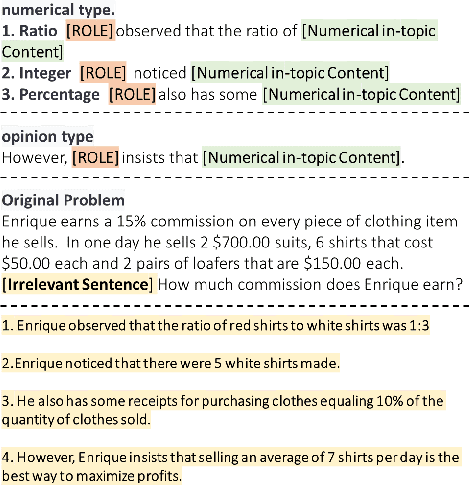
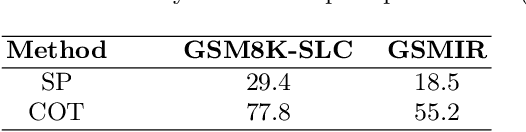
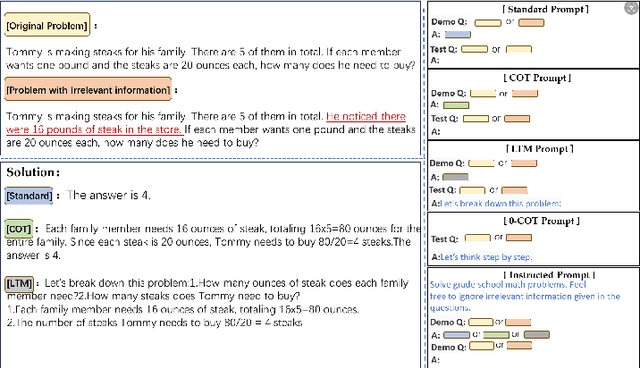
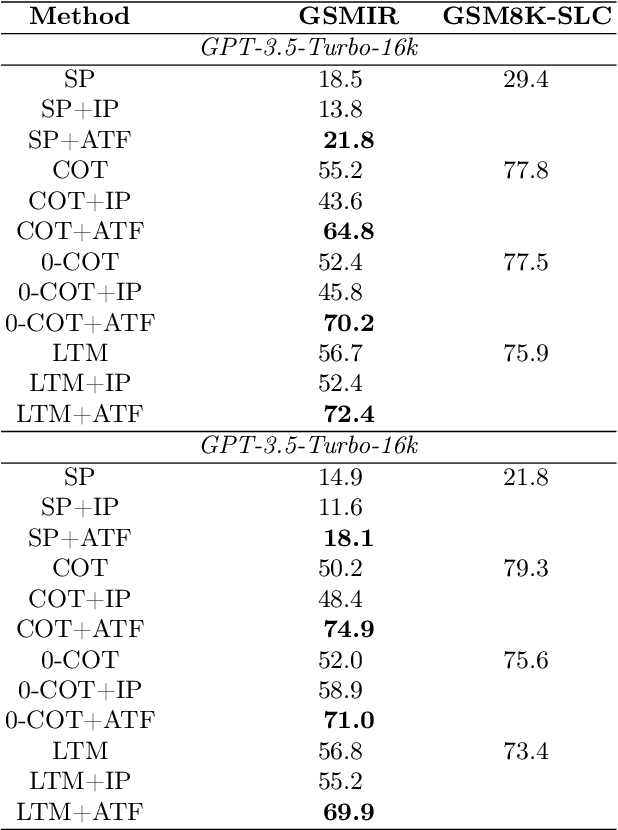
In recent years, Large language models (LLMs) have garnered significant attention due to their superior performance in complex reasoning tasks. However, recent studies may diminish their reasoning capabilities markedly when problem descriptions contain irrelevant information, even with the use of advanced prompting techniques. To further investigate this issue, a dataset of primary school mathematics problems containing irrelevant information, named GSMIR, was constructed. Testing prominent LLMs and prompting techniques on this dataset revealed that while LLMs can identify irrelevant information, they do not effectively mitigate the interference it causes once identified. A novel automatic construction method, ATF, which enhances the ability of LLMs to identify and self-mitigate the influence of irrelevant information, is proposed to address this shortcoming. This method operates in two steps: first, analysis of irrelevant information, followed by its filtering. The ATF method, as demonstrated by experimental results, significantly improves the reasoning performance of LLMs and prompting techniques, even in the presence of irrelevant information on the GSMIR dataset.
Automated Approach for Computer Vision-based Vehicle Movement Classification at Traffic Intersections
Nov 17, 2021
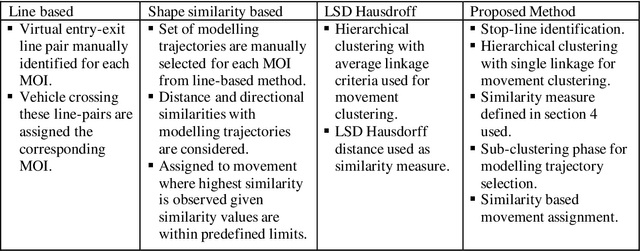

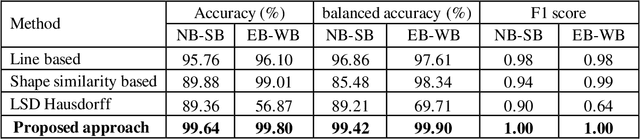
Movement specific vehicle classification and counting at traffic intersections is a crucial component for various traffic management activities. In this context, with recent advancements in computer-vision based techniques, cameras have emerged as a reliable data source for extracting vehicular trajectories from traffic scenes. However, classifying these trajectories by movement type is quite challenging as characteristics of motion trajectories obtained this way vary depending on camera calibrations. Although some existing methods have addressed such classification tasks with decent accuracies, the performance of these methods significantly relied on manual specification of several regions of interest. In this study, we proposed an automated classification method for movement specific classification (such as right-turn, left-turn and through movements) of vision-based vehicle trajectories. Our classification framework identifies different movement patterns observed in a traffic scene using an unsupervised hierarchical clustering technique Thereafter a similarity-based assignment strategy is adopted to assign incoming vehicle trajectories to identified movement groups. A new similarity measure was designed to overcome the inherent shortcomings of vision-based trajectories. Experimental results demonstrated the effectiveness of the proposed classification approach and its ability to adapt to different traffic scenarios without any manual intervention.