 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRM-as-a-Judge: A Dense Evaluation Paradigm for Fine-Grained Robotic Auditing
Mar 23, 2026Current robotic evaluation is still largely dominated by binary success rates, which collapse rich execution processes into a single outcome and obscure critical qualities such as progress, efficiency, and stability. To address this limitation, we propose PRM-as-a-Judge, a dense evaluation paradigm that leverages Process Reward Models (PRMs) to audit policy execution directly from trajectory videos by estimating task progress from observation sequences. Central to this paradigm is the OPD (Outcome-Process-Diagnosis) metric system, which explicitly formalizes execution quality via a task-aligned progress potential. We characterize dense robotic evaluation through two axiomatic properties: macro-consistency, which requires additive and path-consistent aggregation, and micro-resolution, which requires sensitivity to fine-grained physical evolution. Under this formulation, potential-based PRM judges provide a natural instantiation of dense evaluation, with macro-consistency following directly from the induced scalar potential. We empirically validate the micro-resolution property using RoboPulse, a diagnostic benchmark specifically designed for probing micro-scale progress discrimination, where several trajectory-trained PRM judges outperform discriminative similarity-based methods and general-purpose foundation-model judges. Finally, leveraging PRM-as-a-Judge and the OPD metric system, we conduct a structured audit of mainstream policy paradigms across long-horizon tasks, revealing behavioral signatures and failure modes that are invisible to outcome-only metrics.
cuGenOpt: A GPU-Accelerated General-Purpose Metaheuristic Framework for Combinatorial Optimization
Mar 19, 2026Combinatorial optimization problems arise in logistics, scheduling, and resource allocation, yet existing approaches face a fundamental trade-off among generality, performance, and usability. We present cuGenOpt, a GPU-accelerated general-purpose metaheuristic framework that addresses all three dimensions simultaneously. At the engine level, cuGenOpt adopts a "one block evolves one solution" CUDA architecture with a unified encoding abstraction (permutation, binary, integer), a two-level adaptive operator selection mechanism, and hardware-aware resource management. At the extensibility level, a user-defined operator registration interface allows domain experts to inject problem-specific CUDA search operators. At the usability level, a JIT compilation pipeline exposes the framework as a pure-Python API, and an LLM-based modeling assistant converts natural-language problem descriptions into executable solver code. Experiments across five thematic suites on three GPU architectures (T4, V100, A800) show that cuGenOpt outperforms general MIP solvers by orders of magnitude, achieves competitive quality against specialized solvers on instances up to n=150, and attains 4.73% gap on TSP-442 within 30s. Twelve problem types spanning five encoding variants are solved to optimality. Framework-level optimizations cumulatively reduce pcb442 gap from 36% to 4.73% and boost VRPTW throughput by 75-81%. Code: https://github.com/L-yang-yang/cugenopt
BioProAgent: Neuro-Symbolic Grounding for Constrained Scientific Planning
Mar 01, 2026Large language models (LLMs) have demonstrated significant reasoning capabilities in scientific discovery but struggle to bridge the gap to physical execution in wet-labs. In these irreversible environments, probabilistic hallucinations are not merely incorrect, but also cause equipment damage or experimental failure. To address this, we propose \textbf{BioProAgent}, a neuro-symbolic framework that anchors probabilistic planning in a deterministic Finite State Machine (FSM). We introduce a State-Augmented Planning mechanism that enforces a rigorous \textit{Design-Verify-Rectify} workflow, ensuring hardware compliance before execution. Furthermore, we address the context bottleneck inherent in complex device schemas by \textit{Semantic Symbol Grounding}, reducing token consumption by $\sim$6$\times$ through symbolic abstraction. In the extended BioProBench benchmark, BioProAgent achieves 95.6\% physical compliance (compared to 21.0\% for ReAct), demonstrating that neuro-symbolic constraints are essential for reliable autonomy in irreversible physical environments. \footnote{Code at https://github.com/YuyangSunshine/bioproagent and project at https://yuyangsunshine.github.io/BioPro-Project/}
Sound Field Estimation Using Optimal Transport Barycenters in the Presence of Phase Errors
Feb 05, 2026This study introduces a novel approach for estimating plane-wave coefficients in sound field reconstruction, specifically addressing challenges posed by error-in-variable phase perturbations. Such systematic errors typically arise from sensor mis-calibration, including uncertainties in sensor positions and response characteristics, leading to measurement-induced phase shifts in plane wave coefficients. Traditional methods often result in biased estimates or non-convex solutions. To overcome these issues, we propose an optimal transport (OT) framework. This framework operates on a set of lifted non-negative measures that correspond to observation-dependent shifted coefficients relative to the unperturbed ones. By applying OT, the supports of the measures are transported toward an optimal average in the phase space, effectively morphing them into an indistinguishable state. This optimal average, known as barycenter, is linked to the estimated plane-wave coefficients using the same lifting rule. The framework addresses the ill-posed nature of the problem, due to the large number of plane waves, by adding a constant to the ground cost, ensuring the sparsity of the transport matrix. Convex consistency of the solution is maintained. Simulation results confirm that our proposed method provides more accurate coefficient estimations compared to baseline approaches in scenarios with both additive noise and phase perturbations.
Translating Flow to Policy via Hindsight Online Imitation
Dec 22, 2025Recent advances in hierarchical robot systems leverage a high-level planner to propose task plans and a low-level policy to generate robot actions. This design allows training the planner on action-free or even non-robot data sources (e.g., videos), providing transferable high-level guidance. Nevertheless, grounding these high-level plans into executable actions remains challenging, especially with the limited availability of high-quality robot data. To this end, we propose to improve the low-level policy through online interactions. Specifically, our approach collects online rollouts, retrospectively annotates the corresponding high-level goals from achieved outcomes, and aggregates these hindsight-relabeled experiences to update a goal-conditioned imitation policy. Our method, Hindsight Flow-conditioned Online Imitation (HinFlow), instantiates this idea with 2D point flows as the high-level planner. Across diverse manipulation tasks in both simulation and physical world, our method achieves more than $2\times$ performance improvement over the base policy, significantly outperforming the existing methods. Moreover, our framework enables policy acquisition from planners trained on cross-embodiment video data, demonstrating its potential for scalable and transferable robot learning.
Scaling Up AI-Generated Image Detection via Generator-Aware Prototypes
Dec 15, 2025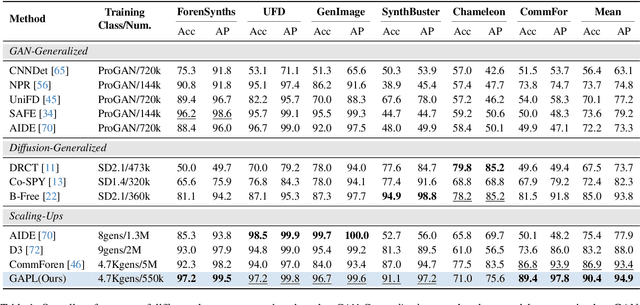
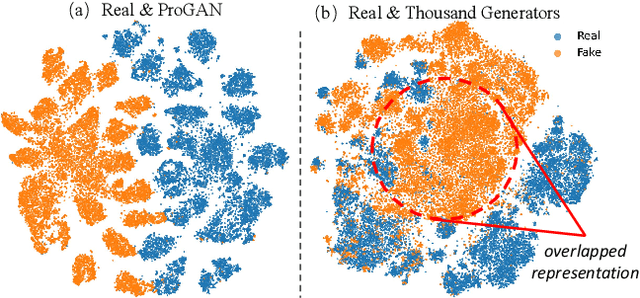
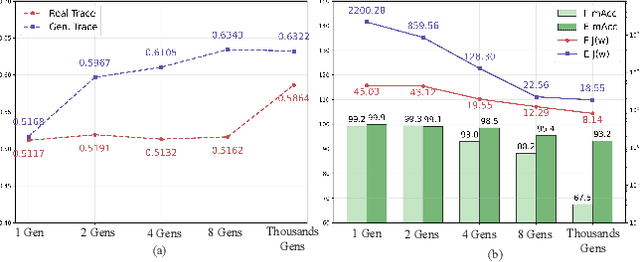
The pursuit of a universal AI-generated image (AIGI) detector often relies on aggregating data from numerous generators to improve generalization. However, this paper identifies a paradoxical phenomenon we term the Benefit then Conflict dilemma, where detector performance stagnates and eventually degrades as source diversity expands. Our systematic analysis, diagnoses this failure by identifying two core issues: severe data-level heterogeneity, which causes the feature distributions of real and synthetic images to increasingly overlap, and a critical model-level bottleneck from fixed, pretrained encoders that cannot adapt to the rising complexity. To address these challenges, we propose Generator-Aware Prototype Learning (GAPL), a framework that constrain representation with a structured learning paradigm. GAPL learns a compact set of canonical forgery prototypes to create a unified, low-variance feature space, effectively countering data heterogeneity.To resolve the model bottleneck, it employs a two-stage training scheme with Low-Rank Adaptation, enhancing its discriminative power while preserving valuable pretrained knowledge. This approach establishes a more robust and generalizable decision boundary. Through extensive experiments, we demonstrate that GAPL achieves state-of-the-art performance, showing superior detection accuracy across a wide variety of GAN and diffusion-based generators. Code is available at https://github.com/UltraCapture/GAPL
Compute-in-Memory Implementation of State Space Models for Event Sequence Processing
Nov 17, 2025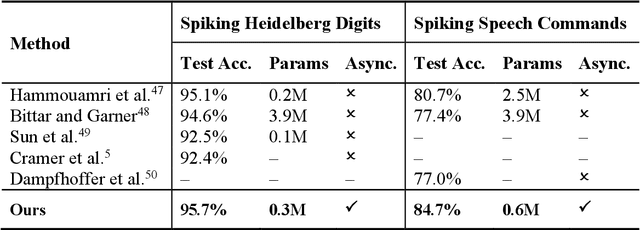
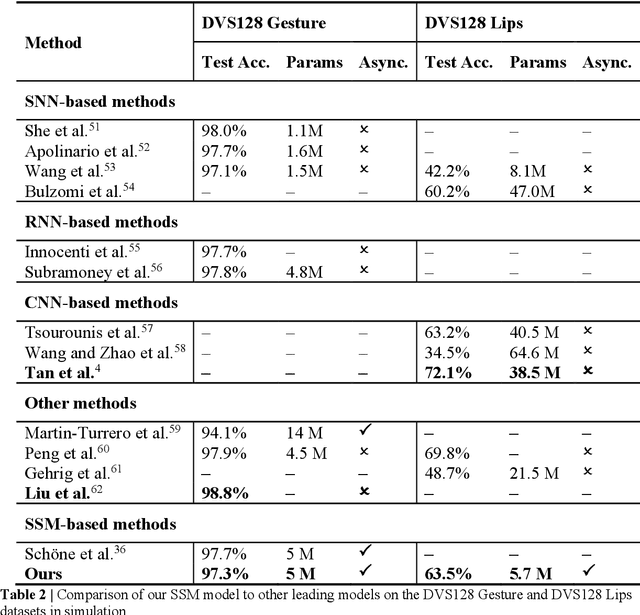
State space models (SSMs) have recently emerged as a powerful framework for long sequence processing, outperforming traditional methods on diverse benchmarks. Fundamentally, SSMs can generalize both recurrent and convolutional networks and have been shown to even capture key functions of biological systems. Here we report an approach to implement SSMs in energy-efficient compute-in-memory (CIM) hardware to achieve real-time, event-driven processing. Our work re-parameterizes the model to function with real-valued coefficients and shared decay constants, reducing the complexity of model mapping onto practical hardware systems. By leveraging device dynamics and diagonalized state transition parameters, the state evolution can be natively implemented in crossbar-based CIM systems combined with memristors exhibiting short-term memory effects. Through this algorithm and hardware co-design, we show the proposed system offers both high accuracy and high energy efficiency while supporting fully asynchronous processing for event-based vision and audio tasks.
Kunlun Anomaly Troubleshooter: Enabling Kernel-Level Anomaly Detection and Causal Reasoning for Large Model Distributed Inference
Nov 08, 2025Anomaly troubleshooting for large model distributed inference (LMDI) remains a critical challenge. Resolving anomalies such as inference performance degradation or latency jitter in distributed system demands significant manual efforts from domain experts, resulting in extremely time-consuming diagnosis processes with relatively low accuracy. In this paper, we introduce Kunlun Anomaly Troubleshooter (KAT), the first anomaly troubleshooting framework tailored for LMDI. KAT addresses this problem through two core innovations. First, KAT exploits the synchronicity and consistency of GPU workers, innovatively leverages function trace data to precisely detect kernel-level anomalies and associated hardware components at nanosecond resolution. Second, KAT integrates these detection results into a domain-adapted LLM, delivering systematic causal reasoning and natural language interpretation of complex anomaly symptoms. Evaluations conducted in Alibaba Cloud Service production environment indicate that KAT achieves over 0.884 precision and 0.936 recall in anomaly detection, providing detail anomaly insights that significantly narrow down the diagnostic scope and improve both the efficiency and success rate of troubleshooting.
StreamSTGS: Streaming Spatial and Temporal Gaussian Grids for Real-Time Free-Viewpoint Video
Nov 08, 2025Streaming free-viewpoint video~(FVV) in real-time still faces significant challenges, particularly in training, rendering, and transmission efficiency. Harnessing superior performance of 3D Gaussian Splatting~(3DGS), recent 3DGS-based FVV methods have achieved notable breakthroughs in both training and rendering. However, the storage requirements of these methods can reach up to $10$MB per frame, making stream FVV in real-time impossible. To address this problem, we propose a novel FVV representation, dubbed StreamSTGS, designed for real-time streaming. StreamSTGS represents a dynamic scene using canonical 3D Gaussians, temporal features, and a deformation field. For high compression efficiency, we encode canonical Gaussian attributes as 2D images and temporal features as a video. This design not only enables real-time streaming, but also inherently supports adaptive bitrate control based on network condition without any extra training. Moreover, we propose a sliding window scheme to aggregate adjacent temporal features to learn local motions, and then introduce a transformer-guided auxiliary training module to learn global motions. On diverse FVV benchmarks, StreamSTGS demonstrates competitive performance on all metrics compared to state-of-the-art methods. Notably, StreamSTGS increases the PSNR by an average of $1$dB while reducing the average frame size to just $170$KB. The code is publicly available on https://github.com/kkkzh/StreamSTGS.
TimeRewarder: Learning Dense Reward from Passive Videos via Frame-wise Temporal Distance
Sep 30, 2025Designing dense rewards is crucial for reinforcement learning (RL), yet in robotics it often demands extensive manual effort and lacks scalability. One promising solution is to view task progress as a dense reward signal, as it quantifies the degree to which actions advance the system toward task completion over time. We present TimeRewarder, a simple yet effective reward learning method that derives progress estimation signals from passive videos, including robot demonstrations and human videos, by modeling temporal distances between frame pairs. We then demonstrate how TimeRewarder can supply step-wise proxy rewards to guide reinforcement learning. In our comprehensive experiments on ten challenging Meta-World tasks, we show that TimeRewarder dramatically improves RL for sparse-reward tasks, achieving nearly perfect success in 9/10 tasks with only 200,000 interactions per task with the environment. This approach outperformed previous methods and even the manually designed environment dense reward on both the final success rate and sample efficiency. Moreover, we show that TimeRewarder pretraining can exploit real-world human videos, highlighting its potential as a scalable approach path to rich reward signals from diverse video sources.