 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOnline Omnidirectional Jumping Trajectory Planning for Quadrupedal Robots on Uneven Terrains
Nov 07, 2024Natural terrain complexity often necessitates agile movements like jumping in animals to improve traversal efficiency. To enable similar capabilities in quadruped robots, complex real-time jumping maneuvers are required. Current research does not adequately address the problem of online omnidirectional jumping and neglects the robot's kinodynamic constraints during trajectory generation. This paper proposes a general and complete cascade online optimization framework for omnidirectional jumping for quadruped robots. Our solution systematically encompasses jumping trajectory generation, a trajectory tracking controller, and a landing controller. It also incorporates environmental perception to navigate obstacles that standard locomotion cannot bypass, such as jumping from high platforms. We introduce a novel jumping plane to parameterize omnidirectional jumping motion and formulate a tightly coupled optimization problem accounting for the kinodynamic constraints, simultaneously optimizing CoM trajectory, Ground Reaction Forces (GRFs), and joint states. To meet the online requirements, we propose an accelerated evolutionary algorithm as the trajectory optimizer to address the complexity of kinodynamic constraints. To ensure stability and accuracy in environmental perception post-landing, we introduce a coarse-to-fine relocalization method that combines global Branch and Bound (BnB) search with Maximum a Posteriori (MAP) estimation for precise positioning during navigation and jumping. The proposed framework achieves jump trajectory generation in approximately 0.1 seconds with a warm start and has been successfully validated on two quadruped robots on uneven terrains. Additionally, we extend the framework's versatility to humanoid robots.
Traversability-Aware Legged Navigation by Learning from Real-World Visual Data
Oct 14, 2024The enhanced mobility brought by legged locomotion empowers quadrupedal robots to navigate through complex and unstructured environments. However, optimizing agile locomotion while accounting for the varying energy costs of traversing different terrains remains an open challenge. Most previous work focuses on planning trajectories with traversability cost estimation based on human-labeled environmental features. However, this human-centric approach is insufficient because it does not account for the varying capabilities of the robot locomotion controllers over challenging terrains. To address this, we develop a novel traversability estimator in a robot-centric manner, based on the value function of the robot's locomotion controller. This estimator is integrated into a new learning-based RGBD navigation framework. The framework develops a planner that guides the robot in avoiding obstacles and hard-to-traverse terrains while reaching its goals. The training of the navigation planner is directly performed in the real world using a sample efficient reinforcement learning method. Through extensive benchmarking, we demonstrate that the proposed framework achieves the best performance in accurate traversability cost estimation and efficient learning from multi-modal data (the robot's color and depth vision, and proprioceptive feedback) for real-world training. Using the proposed method, a quadrupedal robot learns to perform traversability-aware navigation through trial and error in various real-world environments with challenging terrains that are difficult to classify using depth vision alone.
UC-NeRF: Uncertainty-aware Conditional Neural Radiance Fields from Endoscopic Sparse Views
Sep 04, 2024Visualizing surgical scenes is crucial for revealing internal anatomical structures during minimally invasive procedures. Novel View Synthesis is a vital technique that offers geometry and appearance reconstruction, enhancing understanding, planning, and decision-making in surgical scenes. Despite the impressive achievements of Neural Radiance Field (NeRF), its direct application to surgical scenes produces unsatisfying results due to two challenges: endoscopic sparse views and significant photometric inconsistencies. In this paper, we propose uncertainty-aware conditional NeRF for novel view synthesis to tackle the severe shape-radiance ambiguity from sparse surgical views. The core of UC-NeRF is to incorporate the multi-view uncertainty estimation to condition the neural radiance field for modeling the severe photometric inconsistencies adaptively. Specifically, our UC-NeRF first builds a consistency learner in the form of multi-view stereo network, to establish the geometric correspondence from sparse views and generate uncertainty estimation and feature priors. In neural rendering, we design a base-adaptive NeRF network to exploit the uncertainty estimation for explicitly handling the photometric inconsistencies. Furthermore, an uncertainty-guided geometry distillation is employed to enhance geometry learning. Experiments on the SCARED and Hamlyn datasets demonstrate our superior performance in rendering appearance and geometry, consistently outperforming the current state-of-the-art approaches. Our code will be released at \url{https://github.com/wrld/UC-NeRF}.
Free-SurGS: SfM-Free 3D Gaussian Splatting for Surgical Scene Reconstruction
Jul 03, 2024



Real-time 3D reconstruction of surgical scenes plays a vital role in computer-assisted surgery, holding a promise to enhance surgeons' visibility. Recent advancements in 3D Gaussian Splatting (3DGS) have shown great potential for real-time novel view synthesis of general scenes, which relies on accurate poses and point clouds generated by Structure-from-Motion (SfM) for initialization. However, 3DGS with SfM fails to recover accurate camera poses and geometry in surgical scenes due to the challenges of minimal textures and photometric inconsistencies. To tackle this problem, in this paper, we propose the first SfM-free 3DGS-based method for surgical scene reconstruction by jointly optimizing the camera poses and scene representation. Based on the video continuity, the key of our method is to exploit the immediate optical flow priors to guide the projection flow derived from 3D Gaussians. Unlike most previous methods relying on photometric loss only, we formulate the pose estimation problem as minimizing the flow loss between the projection flow and optical flow. A consistency check is further introduced to filter the flow outliers by detecting the rigid and reliable points that satisfy the epipolar geometry. During 3D Gaussian optimization, we randomly sample frames to optimize the scene representations to grow the 3D Gaussian progressively. Experiments on the SCARED dataset demonstrate our superior performance over existing methods in novel view synthesis and pose estimation with high efficiency. Code is available at https://github.com/wrld/Free-SurGS.
Simultaneous Estimation of Shape and Force along Highly Deformable Surgical Manipulators Using Sparse FBG Measurement
Apr 25, 2024



Recently, fiber optic sensors such as fiber Bragg gratings (FBGs) have been widely investigated for shape reconstruction and force estimation of flexible surgical robots. However, most existing approaches need precise model parameters of FBGs inside the fiber and their alignments with the flexible robots for accurate sensing results. Another challenge lies in online acquiring external forces at arbitrary locations along the flexible robots, which is highly required when with large deflections in robotic surgery. In this paper, we propose a novel data-driven paradigm for simultaneous estimation of shape and force along highly deformable flexible robots by using sparse strain measurement from a single-core FBG fiber. A thin-walled soft sensing tube helically embedded with FBG sensors is designed for a robotic-assisted flexible ureteroscope with large deflection up to 270 degrees and a bend radius under 10 mm. We introduce and study three learning models by incorporating spatial strain encoders, and compare their performances in both free space and constrained environments with contact forces at different locations. The experimental results in terms of dynamic shape-force sensing accuracy demonstrate the effectiveness and superiority of the proposed methods.
Speed Co-Augmentation for Unsupervised Audio-Visual Pre-training
Sep 25, 2023This work aims to improve unsupervised audio-visual pre-training. Inspired by the efficacy of data augmentation in visual contrastive learning, we propose a novel speed co-augmentation method that randomly changes the playback speeds of both audio and video data. Despite its simplicity, the speed co-augmentation method possesses two compelling attributes: (1) it increases the diversity of audio-visual pairs and doubles the size of negative pairs, resulting in a significant enhancement in the learned representations, and (2) it changes the strict correlation between audio-visual pairs but introduces a partial relationship between the augmented pairs, which is modeled by our proposed SoftInfoNCE loss to further boost the performance. Experimental results show that the proposed method significantly improves the learned representations when compared to vanilla audio-visual contrastive learning.
Autonomous Intelligent Navigation for Flexible Endoscopy Using Monocular Depth Guidance and 3-D Shape Planning
Feb 26, 2023



Recent advancements toward perception and decision-making of flexible endoscopes have shown great potential in computer-aided surgical interventions. However, owing to modeling uncertainty and inter-patient anatomical variation in flexible endoscopy, the challenge remains for efficient and safe navigation in patient-specific scenarios. This paper presents a novel data-driven framework with self-contained visual-shape fusion for autonomous intelligent navigation of flexible endoscopes requiring no priori knowledge of system models and global environments. A learning-based adaptive visual servoing controller is proposed to online update the eye-in-hand vision-motor configuration and steer the endoscope, which is guided by monocular depth estimation via a vision transformer (ViT). To prevent unnecessary and excessive interactions with surrounding anatomy, an energy-motivated shape planning algorithm is introduced through entire endoscope 3-D proprioception from embedded fiber Bragg grating (FBG) sensors. Furthermore, a model predictive control (MPC) strategy is developed to minimize the elastic potential energy flow and simultaneously optimize the steering policy. Dedicated navigation experiments on a robotic-assisted flexible endoscope with an FBG fiber in several phantom environments demonstrate the effectiveness and adaptability of the proposed framework.
Self-supervised Video Representation Learning by Uncovering Spatio-temporal Statistics
Aug 31, 2020


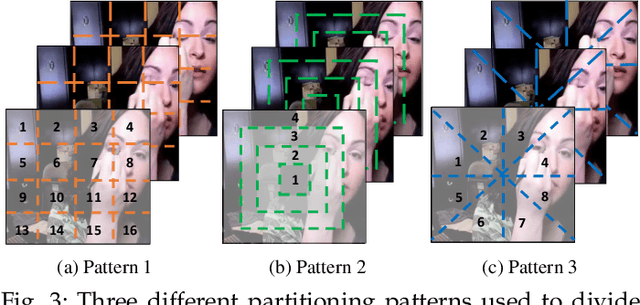
This paper proposes a novel pretext task to address the self-supervised video representation learning problem. Specifically, given an unlabeled video clip, we compute a series of spatio-temporal statistical summaries, such as the spatial location and dominant direction of the largest motion, the spatial location and dominant color of the largest color diversity along the temporal axis, etc. Then a neural network is built and trained to yield the statistical summaries given the video frames as inputs. In order to alleviate the learning difficulty, we employ several spatial partitioning patterns to encode rough spatial locations instead of exact spatial Cartesian coordinates. Our approach is inspired by the observation that human visual system is sensitive to rapidly changing contents in the visual field, and only needs impressions about rough spatial locations to understand the visual contents. To validate the effectiveness of the proposed approach, we conduct extensive experiments with several 3D backbone networks, i.e., C3D, 3D-ResNet and R(2+1)D. The results show that our approach outperforms the existing approaches across the three backbone networks on various downstream video analytic tasks including action recognition, video retrieval, dynamic scene recognition, and action similarity labeling. The source code is made publicly available at: https://github.com/laura-wang/video_repres_sts.