 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneous Estimation of Shape and Force along Highly Deformable Surgical Manipulators Using Sparse FBG Measurement
Apr 25, 2024



Recently, fiber optic sensors such as fiber Bragg gratings (FBGs) have been widely investigated for shape reconstruction and force estimation of flexible surgical robots. However, most existing approaches need precise model parameters of FBGs inside the fiber and their alignments with the flexible robots for accurate sensing results. Another challenge lies in online acquiring external forces at arbitrary locations along the flexible robots, which is highly required when with large deflections in robotic surgery. In this paper, we propose a novel data-driven paradigm for simultaneous estimation of shape and force along highly deformable flexible robots by using sparse strain measurement from a single-core FBG fiber. A thin-walled soft sensing tube helically embedded with FBG sensors is designed for a robotic-assisted flexible ureteroscope with large deflection up to 270 degrees and a bend radius under 10 mm. We introduce and study three learning models by incorporating spatial strain encoders, and compare their performances in both free space and constrained environments with contact forces at different locations. The experimental results in terms of dynamic shape-force sensing accuracy demonstrate the effectiveness and superiority of the proposed methods.
Autonomous Intelligent Navigation for Flexible Endoscopy Using Monocular Depth Guidance and 3-D Shape Planning
Feb 26, 2023



Recent advancements toward perception and decision-making of flexible endoscopes have shown great potential in computer-aided surgical interventions. However, owing to modeling uncertainty and inter-patient anatomical variation in flexible endoscopy, the challenge remains for efficient and safe navigation in patient-specific scenarios. This paper presents a novel data-driven framework with self-contained visual-shape fusion for autonomous intelligent navigation of flexible endoscopes requiring no priori knowledge of system models and global environments. A learning-based adaptive visual servoing controller is proposed to online update the eye-in-hand vision-motor configuration and steer the endoscope, which is guided by monocular depth estimation via a vision transformer (ViT). To prevent unnecessary and excessive interactions with surrounding anatomy, an energy-motivated shape planning algorithm is introduced through entire endoscope 3-D proprioception from embedded fiber Bragg grating (FBG) sensors. Furthermore, a model predictive control (MPC) strategy is developed to minimize the elastic potential energy flow and simultaneously optimize the steering policy. Dedicated navigation experiments on a robotic-assisted flexible endoscope with an FBG fiber in several phantom environments demonstrate the effectiveness and adaptability of the proposed framework.
FBG-Based Variable-Length Estimation for Shape Sensing of Extensible Soft Robotic Manipulators
Dec 03, 2022In this paper, we propose a novel variable-length estimation approach for shape sensing of extensible soft robots utilizing fiber Bragg gratings (FBGs). Shape reconstruction from FBG sensors has been increasingly developed for soft robots, while the narrow stretching range of FBG fiber makes it difficult to acquire accurate sensing results for extensible robots. Towards this limitation, we newly introduce an FBG-based length sensor by leveraging a rigid curved channel, through which FBGs are allowed to slide within the robot following its body extension/compression, hence we can search and match the FBGs with specific constant curvature in the fiber to determine the effective length. From the fusion with the above measurements, a model-free filtering technique is accordingly presented for simultaneous calibration of a variable-length model and temporally continuous length estimation of the robot, enabling its accurate shape sensing using solely FBGs. The performances of the proposed method have been experimentally evaluated on an extensible soft robot equipped with an FBG fiber in both free and unstructured environments. The results concerning dynamic accuracy and robustness of length estimation and shape sensing demonstrate the effectiveness of our approach.
Robust Data-Driven 3-D Shape Servoing of Unmodeled Continuum Robots Using FBG Sensors in Unstructured Environments
Sep 12, 2022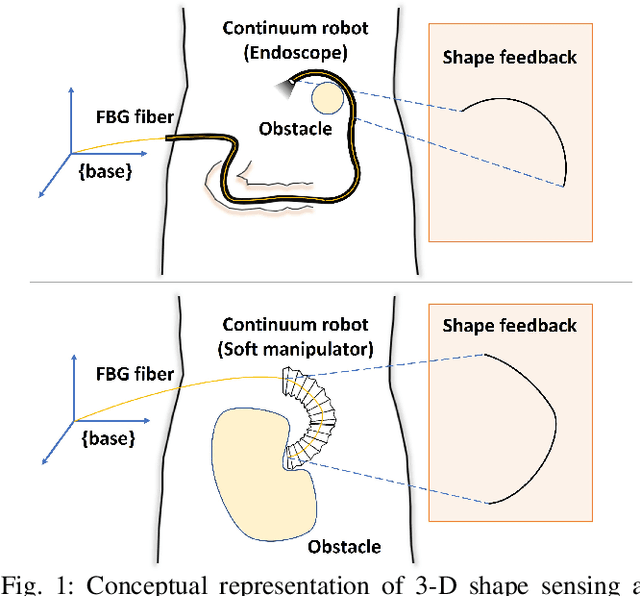



In this paper, we present a novel and generic data-driven method to servo-control the 3-D shape of continuum robots embedded with fiber Bragg grating (FBG) sensors. Developments of 3-D shape perception and control technologies are crucial for continuum robots to perform the tasks autonomously in surgical interventions. However, owing to the nonlinear properties of continuum robots, one main difficulty lies in the modeling of them, especially for soft robots with variable stiffness. To address this problem, we propose a new robust adaptive controller by leveraging FBG shape feedback and neural networks (NNs) that can online estimate the unknown model of continuum robot and accounts for unexpected disturbances together with NN approximation errors, which exhibits an adaptive behavior to the unmodeled system without priori data exploration. Based on a new composite adaptation algorithm, the asymptotic convergences of the closed-loop system with NNs learning parameters have been proven by Lyapunov theory. To validate the proposed method, we present a comprehensive experimental study by using two continuum robots both integrated with multi-core FBGs, including a robotic-assisted colonoscope and multi-section extensible soft manipulators. The results demonstrate the feasibility, adaptability, and superiority of our controller in various unstructured environments as well as phantom experiments.
Tele-Operated Oropharyngeal Swab (TOOS) RobotEnabled by TSS Soft Hand for Safe and EffectiveCOVID-19 OP Sampling
Sep 20, 2021

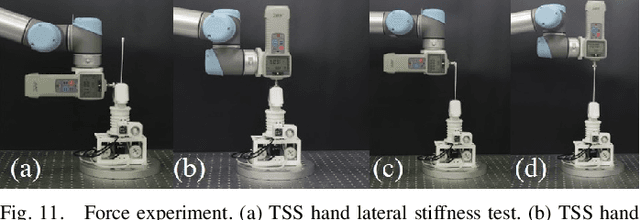

The COVID-19 pandemic has imposed serious challenges in multiple perspectives of human life. To diagnose COVID-19, oropharyngeal swab (OP SWAB) sampling is generally applied for viral nucleic acid (VNA) specimen collection. However, manual sampling exposes medical staff to a high risk of infection. Robotic sampling is promising to mitigate this risk to the minimum level, but traditional robot suffers from safety, cost, and control complexity issues for wide-scale deployment. In this work, we present soft robotic technology is promising to achieve robotic OP swab sampling with excellent swab manipulability in a confined oral space and works as dexterous as existing manual approach. This is enabled by a novel Tstone soft (TSS) hand, consisting of a soft wrist and a soft gripper, designed from human sampling observation and bio-inspiration. TSS hand is in a compact size, exerts larger workspace, and achieves comparable dexterity compared to human hand. The soft wrist is capable of agile omnidirectional bending with adjustable stiffness. The terminal soft gripper is effective for disposable swab pinch and replacement. The OP sampling force is easy to be maintained in a safe and comfortable range (throat sampling comfortable region) under a hybrid motion and stiffness virtual fixture-based controller. A dedicated 3 DOFs RCM platform is used for TSS hand global positioning. Design, modeling, and control of the TSS hand are discussed in detail with dedicated experimental validations. A sampling test based on human tele-operation is processed on the oral cavity model with excellent success rate. The proposed TOOS robot demonstrates a highly promising solution for tele-operated, safe, cost-effective, and quick deployable COVID-19 OP swab sampling.
Data-driven Holistic Framework for Automated Laparoscope Optimal View Control with Learning-based Depth Perception
Nov 23, 2020


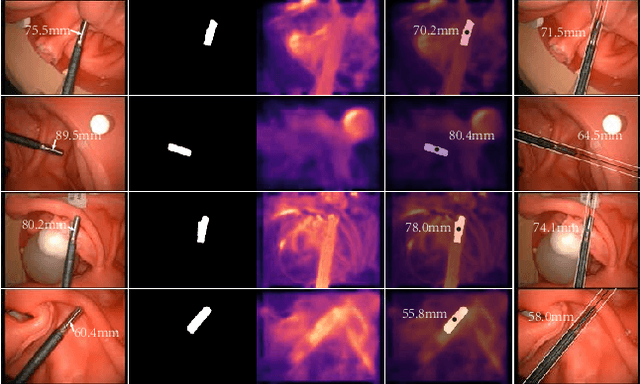
Laparoscopic Field of View (FOV) control is one of the most fundamental and important components in Minimally Invasive Surgery (MIS), nevertheless, the traditional manual holding paradigm may easily bring fatigue to surgical assistants, and misunderstanding between surgeons also hinders assistants to provide a high-quality FOV. Targeting this problem, we here present a data-driven framework to realize an automated laparoscopic optimal FOV control. To achieve this goal, we offline learn a motion strategy of laparoscope relative to the surgeon's hand-held surgical tool from our in-house surgical videos, developing our control domain knowledge and an optimal view generator. To adjust the laparoscope online, we first adopt a learning-based method to segment the two-dimensional (2D) position of the surgical tool, and further leverage this outcome to obtain its scale-aware depth from dense depth estimation results calculated by our novel unsupervised RoboDepth model only with the monocular camera feedback, hence in return fusing the above real-time 3D position into our control loop. To eliminate the misorientation of FOV caused by Remote Center of Motion (RCM) constraints when moving the laparoscope, we propose a novel distortion constraint using an affine map to minimize the visual warping problem, and a null-space controller is also embedded into the framework to optimize all types of errors in a unified and decoupled manner. Experiments are conducted using Universal Robot (UR) and Karl Storz Laparoscope/Instruments, which prove the feasibility of our domain knowledge and learning enabled framework for automated camera control.