 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Data-Driven 3-D Shape Servoing of Unmodeled Continuum Robots Using FBG Sensors in Unstructured Environments
Paper and Code
Sep 12, 2022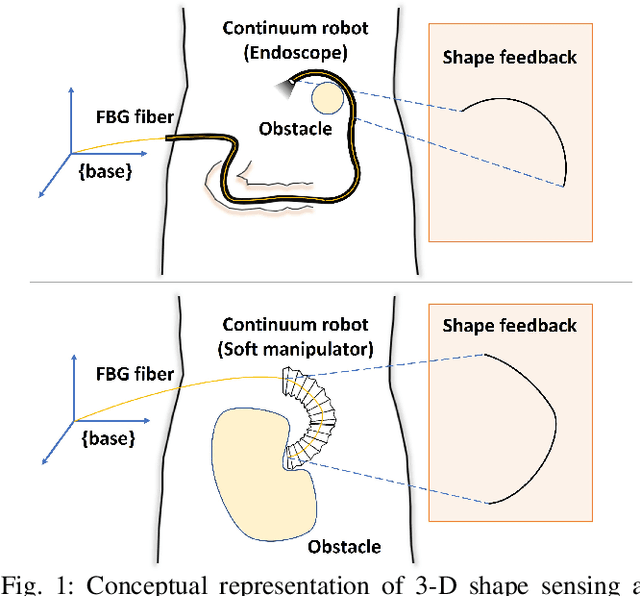



In this paper, we present a novel and generic data-driven method to servo-control the 3-D shape of continuum robots embedded with fiber Bragg grating (FBG) sensors. Developments of 3-D shape perception and control technologies are crucial for continuum robots to perform the tasks autonomously in surgical interventions. However, owing to the nonlinear properties of continuum robots, one main difficulty lies in the modeling of them, especially for soft robots with variable stiffness. To address this problem, we propose a new robust adaptive controller by leveraging FBG shape feedback and neural networks (NNs) that can online estimate the unknown model of continuum robot and accounts for unexpected disturbances together with NN approximation errors, which exhibits an adaptive behavior to the unmodeled system without priori data exploration. Based on a new composite adaptation algorithm, the asymptotic convergences of the closed-loop system with NNs learning parameters have been proven by Lyapunov theory. To validate the proposed method, we present a comprehensive experimental study by using two continuum robots both integrated with multi-core FBGs, including a robotic-assisted colonoscope and multi-section extensible soft manipulators. The results demonstrate the feasibility, adaptability, and superiority of our controller in various unstructured environments as well as phantom experiments.