 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRefined Motion Compensation with Soft Laser Manipulators using Data-Driven Surrogate Models
Jul 02, 2024



Non-contact laser ablation, a precise thermal technique, simultaneously cuts and coagulates tissue without the insertion errors associated with rigid needles. Human organ motions, such as those in the liver, exhibit rhythmic components influenced by respiratory and cardiac cycles, making effective laser energy delivery to target lesions while compensating for tumor motion crucial. This research introduces a data-driven method to derive surrogate models of a soft manipulator. These low-dimensional models offer computational efficiency when integrated into the Model Predictive Control (MPC) framework, while still capturing the manipulator's dynamics with and without control input. Spectral Submanifolds (SSM) theory models the manipulator's autonomous dynamics, acknowledging its tendency to reach equilibrium when external forces are removed. Preliminary results show that the MPC controller using the surrogate model outperforms two other models within the same MPC framework. The data-driven MPC controller also supports a design-agnostic feature, allowing the interchangeability of different soft manipulators within the laser ablation surgery robot system.
Simultaneous Estimation of Shape and Force along Highly Deformable Surgical Manipulators Using Sparse FBG Measurement
Apr 25, 2024



Recently, fiber optic sensors such as fiber Bragg gratings (FBGs) have been widely investigated for shape reconstruction and force estimation of flexible surgical robots. However, most existing approaches need precise model parameters of FBGs inside the fiber and their alignments with the flexible robots for accurate sensing results. Another challenge lies in online acquiring external forces at arbitrary locations along the flexible robots, which is highly required when with large deflections in robotic surgery. In this paper, we propose a novel data-driven paradigm for simultaneous estimation of shape and force along highly deformable flexible robots by using sparse strain measurement from a single-core FBG fiber. A thin-walled soft sensing tube helically embedded with FBG sensors is designed for a robotic-assisted flexible ureteroscope with large deflection up to 270 degrees and a bend radius under 10 mm. We introduce and study three learning models by incorporating spatial strain encoders, and compare their performances in both free space and constrained environments with contact forces at different locations. The experimental results in terms of dynamic shape-force sensing accuracy demonstrate the effectiveness and superiority of the proposed methods.
Towards Safe Control of Continuum Manipulator Using Shielded Multiagent Reinforcement Learning
Jun 15, 2021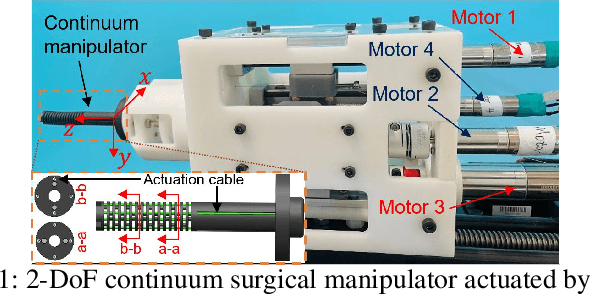
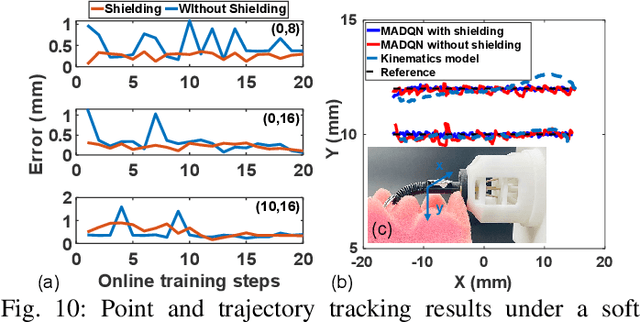
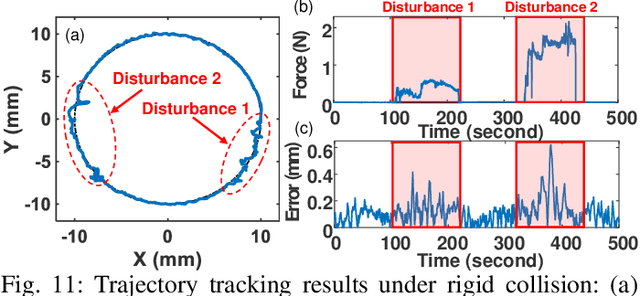
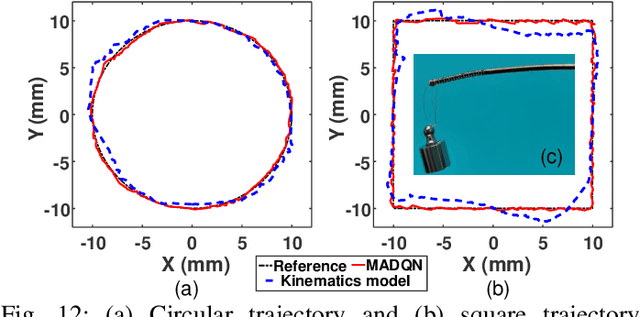
Continuum robotic manipulators are increasingly adopted in minimal invasive surgery. However, their nonlinear behavior is challenging to model accurately, especially when subject to external interaction, potentially leading to poor control performance. In this letter, we investigate the feasibility of adopting a model-free multiagent reinforcement learning (RL), namely multiagent deep Q network (MADQN), to control a 2-degree of freedom (DoF) cable-driven continuum surgical manipulator. The control of the robot is formulated as a one-DoF, one agent problem in the MADQN framework to improve the learning efficiency. Combined with a shielding scheme that enables dynamic variation of the action set boundary, MADQN leads to efficient and importantly safer control of the robot. Shielded MADQN enabled the robot to perform point and trajectory tracking with submillimeter root mean square errors under external loads, soft obstacles, and rigid collision, which are common interaction scenarios encountered by surgical manipulators. The controller was further proven to be effective in a miniature continuum robot with high structural nonlinearitiy, achieving trajectory tracking with submillimeter accuracy under external payload.