 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMambaXCTrack: Mamba-based Tracker with SSM Cross-correlation and Motion Prompt for Ultrasound Needle Tracking
Nov 13, 2024



Ultrasound (US)-guided needle insertion is widely employed in percutaneous interventions. However, providing feedback on the needle tip position via US image presents challenges due to noise, artifacts, and the thin imaging plane of US, which degrades needle features and leads to intermittent tip visibility. In this paper, a Mamba-based US needle tracker MambaXCTrack utilizing structured state space models cross-correlation (SSMX-Corr) and implicit motion prompt is proposed, which is the first application of Mamba in US needle tracking. The SSMX-Corr enhances cross-correlation by long-range modeling and global searching of distant semantic features between template and search maps, benefiting the tracking under noise and artifacts by implicitly learning potential distant semantic cues. By combining with cross-map interleaved scan (CIS), local pixel-wise interaction with positional inductive bias can also be introduced to SSMX-Corr. The implicit low-level motion descriptor is proposed as a non-visual prompt to enhance tracking robustness, addressing the intermittent tip visibility problem. Extensive experiments on a dataset with motorized needle insertion in both phantom and tissue samples demonstrate that the proposed tracker outperforms other state-of-the-art trackers while ablation studies further highlight the effectiveness of each proposed tracking module.
Motion-Guided Dual-Camera Tracker for Low-Cost Skill Evaluation of Gastric Endoscopy
Mar 08, 2024Gastric simulators with objective educational feedback have been proven useful for endoscopy training. Existing electronic simulators with feedback are however not commonly adopted due to their high cost. In this work, a motion-guided dual-camera tracker is proposed to provide reliable endoscope tip position feedback at a low cost inside a mechanical simulator for endoscopy skill evaluation, tackling several unique challenges. To address the issue of significant appearance variation of the endoscope tip while keeping dual-camera tracking consistency, the cross-camera mutual template strategy (CMT) is proposed to introduce dynamic transient mutual templates to dual-camera tracking. To alleviate disturbance from large occlusion and distortion by the light source from the endoscope tip, the Mamba-based motion-guided prediction head (MMH) is presented to aggregate visual tracking with historical motion information modeled by the state space model. The proposed tracker was evaluated on datasets captured by low-cost camera pairs during endoscopy procedures performed inside the mechanical simulator. The tracker achieves SOTA performance with robust and consistent tracking on dual cameras. Further downstream evaluation proves that the 3D tip position determined by the proposed tracker enables reliable skill differentiation. The code and dataset will be released upon acceptance.
A Unified Framework for Microscopy Defocus Deblur with Multi-Pyramid Transformer and Contrastive Learning
Mar 05, 2024



Defocus blur is a persistent problem in microscope imaging that poses harm to pathology interpretation and medical intervention in cell microscopy and microscope surgery. To address this problem, a unified framework including multi-pyramid transformer (MPT) and extended frequency contrastive regularization (EFCR) is proposed to tackle two outstanding challenges in microscopy deblur: longer attention span and feature deficiency. The MPT employs an explicit pyramid structure at each network stage that integrates the cross-scale window attention (CSWA), the intra-scale channel attention (ISCA), and the feature-enhancing feed-forward network (FEFN) to capture long-range cross-scale spatial interaction and global channel context. The EFCR addresses the feature deficiency problem by exploring latent deblur signals from different frequency bands. It also enables deblur knowledge transfer to learn cross-domain information from extra data, improving deblur performance for labeled and unlabeled data. Extensive experiments and downstream task validation show the framework achieves state-of-the-art performance across multiple datasets. Project page: https://github.com/PieceZhang/MPT-CataBlur.
Towards Safe Control of Continuum Manipulator Using Shielded Multiagent Reinforcement Learning
Jun 15, 2021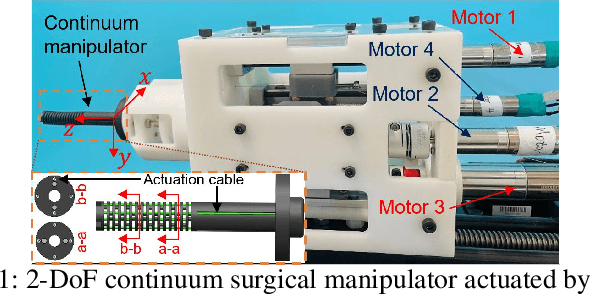
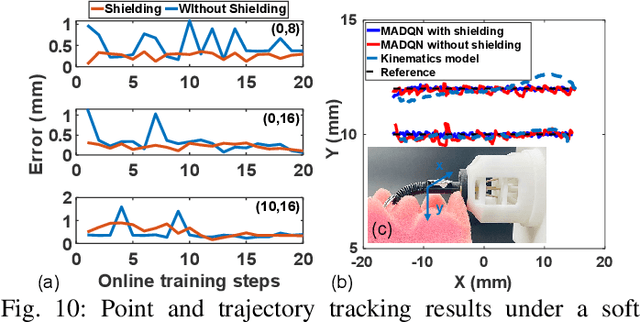
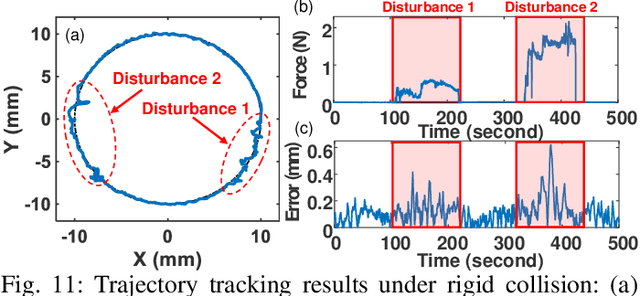
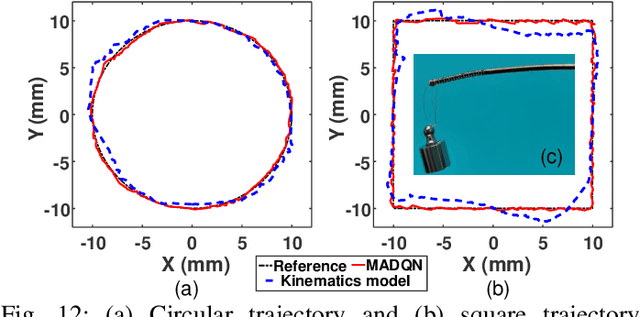
Continuum robotic manipulators are increasingly adopted in minimal invasive surgery. However, their nonlinear behavior is challenging to model accurately, especially when subject to external interaction, potentially leading to poor control performance. In this letter, we investigate the feasibility of adopting a model-free multiagent reinforcement learning (RL), namely multiagent deep Q network (MADQN), to control a 2-degree of freedom (DoF) cable-driven continuum surgical manipulator. The control of the robot is formulated as a one-DoF, one agent problem in the MADQN framework to improve the learning efficiency. Combined with a shielding scheme that enables dynamic variation of the action set boundary, MADQN leads to efficient and importantly safer control of the robot. Shielded MADQN enabled the robot to perform point and trajectory tracking with submillimeter root mean square errors under external loads, soft obstacles, and rigid collision, which are common interaction scenarios encountered by surgical manipulators. The controller was further proven to be effective in a miniature continuum robot with high structural nonlinearitiy, achieving trajectory tracking with submillimeter accuracy under external payload.