 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMrTrack: Register Mamba for Needle Tracking with Rapid Reciprocating Motion during Ultrasound-Guided Aspiration Biopsy
May 14, 2025Ultrasound-guided fine needle aspiration (FNA) biopsy is a common minimally invasive diagnostic procedure. However, an aspiration needle tracker addressing rapid reciprocating motion is still missing. MrTrack, an aspiration needle tracker with a mamba-based register mechanism, is proposed. MrTrack leverages a Mamba-based register extractor to sequentially distill global context from each historical search map, storing these temporal cues in a register bank. The Mamba-based register retriever then retrieves temporal prompts from the register bank to provide external cues when current vision features are temporarily unusable due to rapid reciprocating motion and imaging degradation. A self-supervised register diversify loss is proposed to encourage feature diversity and dimension independence within the learned register, mitigating feature collapse. Comprehensive experiments conducted on both motorized and manual aspiration datasets demonstrate that MrTrack not only outperforms state-of-the-art trackers in accuracy and robustness but also achieves superior inference efficiency.
MambaXCTrack: Mamba-based Tracker with SSM Cross-correlation and Motion Prompt for Ultrasound Needle Tracking
Nov 13, 2024



Ultrasound (US)-guided needle insertion is widely employed in percutaneous interventions. However, providing feedback on the needle tip position via US image presents challenges due to noise, artifacts, and the thin imaging plane of US, which degrades needle features and leads to intermittent tip visibility. In this paper, a Mamba-based US needle tracker MambaXCTrack utilizing structured state space models cross-correlation (SSMX-Corr) and implicit motion prompt is proposed, which is the first application of Mamba in US needle tracking. The SSMX-Corr enhances cross-correlation by long-range modeling and global searching of distant semantic features between template and search maps, benefiting the tracking under noise and artifacts by implicitly learning potential distant semantic cues. By combining with cross-map interleaved scan (CIS), local pixel-wise interaction with positional inductive bias can also be introduced to SSMX-Corr. The implicit low-level motion descriptor is proposed as a non-visual prompt to enhance tracking robustness, addressing the intermittent tip visibility problem. Extensive experiments on a dataset with motorized needle insertion in both phantom and tissue samples demonstrate that the proposed tracker outperforms other state-of-the-art trackers while ablation studies further highlight the effectiveness of each proposed tracking module.
Epicardium Prompt-guided Real-time Cardiac Ultrasound Frame-to-volume Registration
Jun 20, 2024



A comprehensive guidance view for cardiac interventional surgery can be provided by the real-time fusion of the intraoperative 2D images and preoperative 3D volume based on the ultrasound frame-to-volume registration. However, cardiac ultrasound images are characterized by a low signal-to-noise ratio and small differences between adjacent frames, coupled with significant dimension variations between 2D frames and 3D volumes to be registered, resulting in real-time and accurate cardiac ultrasound frame-to-volume registration being a very challenging task. This paper introduces a lightweight end-to-end Cardiac Ultrasound frame-to-volume Registration network, termed CU-Reg. Specifically, the proposed model leverages epicardium prompt-guided anatomical clues to reinforce the interaction of 2D sparse and 3D dense features, followed by a voxel-wise local-global aggregation of enhanced features, thereby boosting the cross-dimensional matching effectiveness of low-quality ultrasound modalities. We further embed an inter-frame discriminative regularization term within the hybrid supervised learning to increase the distinction between adjacent slices in the same ultrasound volume to ensure registration stability. Experimental results on the reprocessed CAMUS dataset demonstrate that our CU-Reg surpasses existing methods in terms of registration accuracy and efficiency, meeting the guidance requirements of clinical cardiac interventional surgery.
Model-Based Compensation of Moving Tissue for State Recognition in Robotic-Assisted Pedicle Drilling
Jun 02, 2020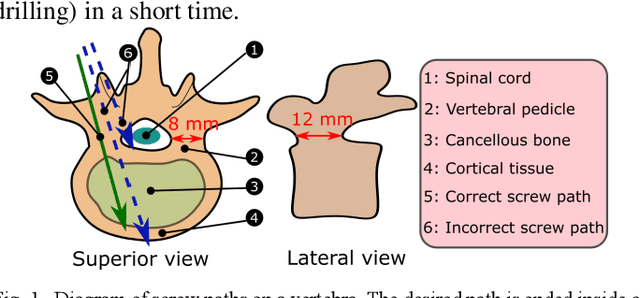

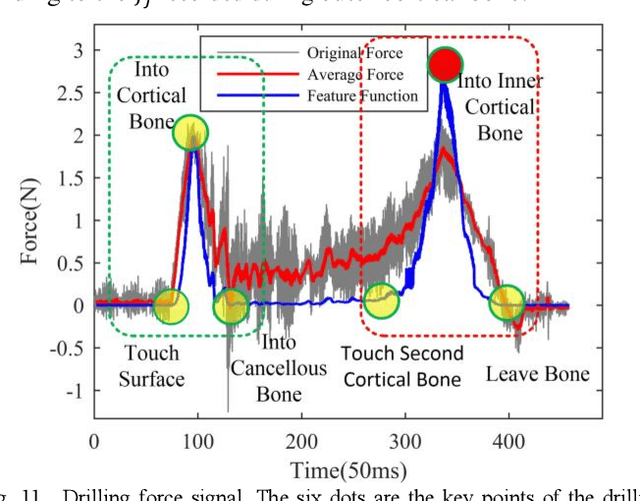
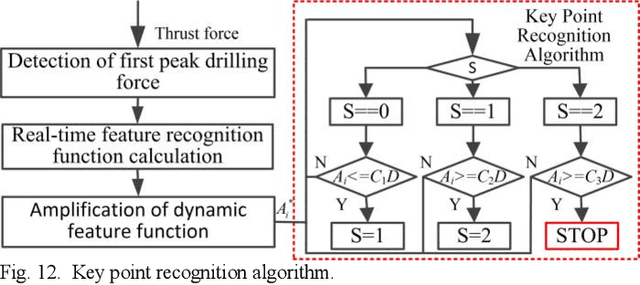
Drilling is one of the hardest parts of pedicle screw fixation, and it is one of the most dangerous operations because inaccurate screw placement would injury vital tissues, particularly when the vertebra is not stationary. Here we demonstrate the drilling state recognition method for moving tissue by compensating the displacement based on a simplified motion predication model of a vertebra with respect to the tidal volume. To adapt it to different patients, the prediction model was built based on the physiological data recorded from subjects themselves. In addition, the spindle speed of the drilling tool was investigated to find a suitable speed for the robotic-assisted system. To ensure patient safety, a monitoring system was built based on the thrusting force and tracked position information. Finally, experiments were carried out on a fresh porcine lamellar bone fixed on a 3-PRS parallel robot used to simulate the vertebra displacement. The success rate of the robotic-assisted drilling procedure reached 95% when the moving bone was compensated.