 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFew-Shot Medical Image Segmentation with High-Fidelity Prototypes
Jun 26, 2024



Few-shot Semantic Segmentation (FSS) aims to adapt a pretrained model to new classes with as few as a single labelled training sample per class. Despite the prototype based approaches have achieved substantial success, existing models are limited to the imaging scenarios with considerably distinct objects and not highly complex background, e.g., natural images. This makes such models suboptimal for medical imaging with both conditions invalid. To address this problem, we propose a novel Detail Self-refined Prototype Network (DSPNet) to constructing high-fidelity prototypes representing the object foreground and the background more comprehensively. Specifically, to construct global semantics while maintaining the captured detail semantics, we learn the foreground prototypes by modelling the multi-modal structures with clustering and then fusing each in a channel-wise manner. Considering that the background often has no apparent semantic relation in the spatial dimensions, we integrate channel-specific structural information under sparse channel-aware regulation. Extensive experiments on three challenging medical image benchmarks show the superiority of DSPNet over previous state-of-the-art methods.
Model-Based Compensation of Moving Tissue for State Recognition in Robotic-Assisted Pedicle Drilling
Jun 02, 2020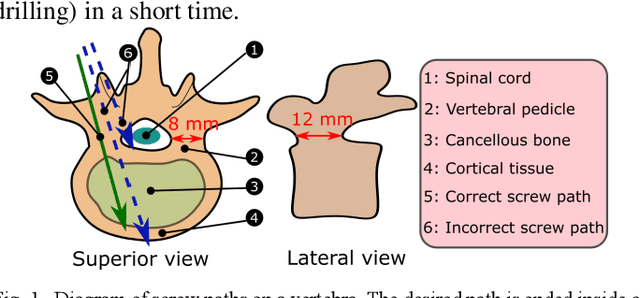

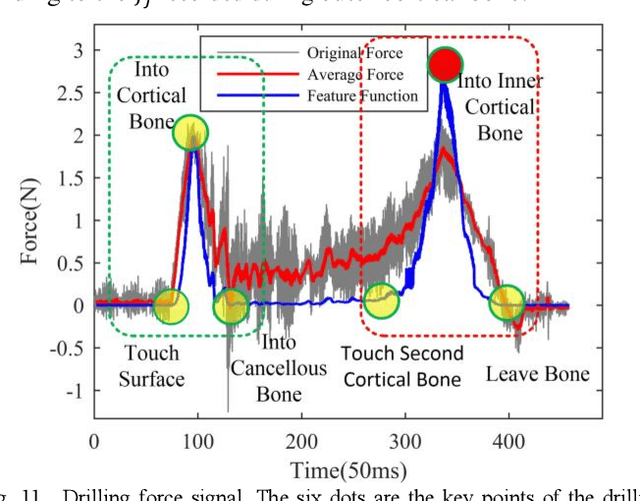
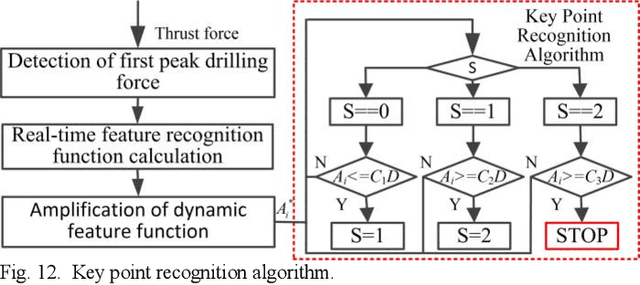
Drilling is one of the hardest parts of pedicle screw fixation, and it is one of the most dangerous operations because inaccurate screw placement would injury vital tissues, particularly when the vertebra is not stationary. Here we demonstrate the drilling state recognition method for moving tissue by compensating the displacement based on a simplified motion predication model of a vertebra with respect to the tidal volume. To adapt it to different patients, the prediction model was built based on the physiological data recorded from subjects themselves. In addition, the spindle speed of the drilling tool was investigated to find a suitable speed for the robotic-assisted system. To ensure patient safety, a monitoring system was built based on the thrusting force and tracked position information. Finally, experiments were carried out on a fresh porcine lamellar bone fixed on a 3-PRS parallel robot used to simulate the vertebra displacement. The success rate of the robotic-assisted drilling procedure reached 95% when the moving bone was compensated.