 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShared Object Manipulation with a Team of Collaborative Quadrupeds
Oct 01, 2025
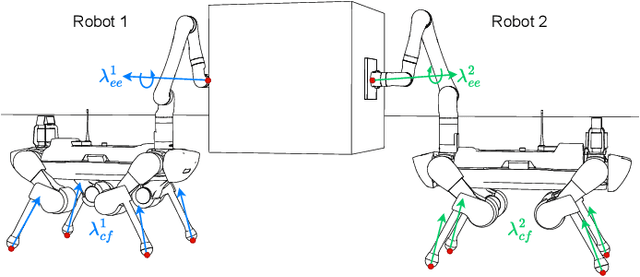
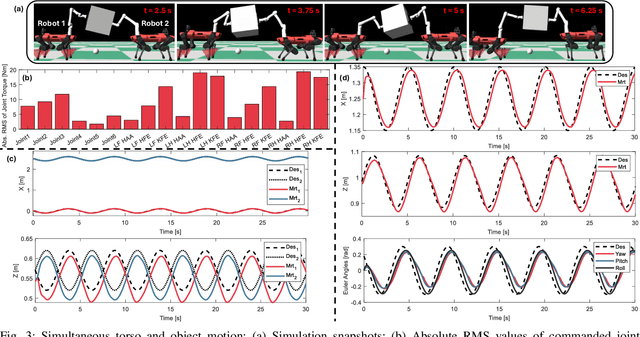
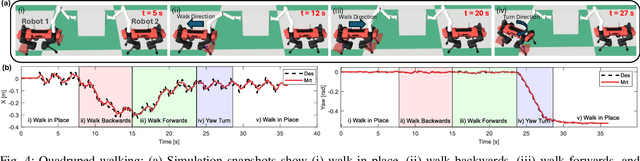
Utilizing teams of multiple robots is advantageous for handling bulky objects. Many related works focus on multi-manipulator systems, which are limited by workspace constraints. In this paper, we extend a classical hybrid motion-force controller to a team of legged manipulator systems, enabling collaborative loco-manipulation of rigid objects with a force-closed grasp. Our novel approach allows the robots to flexibly coordinate their movements, achieving efficient and stable object co-manipulation and transport, validated through extensive simulations and real-world experiments.
Whole-Body Control Framework for Humanoid Robots with Heavy Limbs: A Model-Based Approach
Jun 17, 2025Humanoid robots often face significant balance issues due to the motion of their heavy limbs. These challenges are particularly pronounced when attempting dynamic motion or operating in environments with irregular terrain. To address this challenge, this manuscript proposes a whole-body control framework for humanoid robots with heavy limbs, using a model-based approach that combines a kino-dynamics planner and a hierarchical optimization problem. The kino-dynamics planner is designed as a model predictive control (MPC) scheme to account for the impact of heavy limbs on mass and inertia distribution. By simplifying the robot's system dynamics and constraints, the planner enables real-time planning of motion and contact forces. The hierarchical optimization problem is formulated using Hierarchical Quadratic Programming (HQP) to minimize limb control errors and ensure compliance with the policy generated by the kino-dynamics planner. Experimental validation of the proposed framework demonstrates its effectiveness. The humanoid robot with heavy limbs controlled by the proposed framework can achieve dynamic walking speeds of up to 1.2~m/s, respond to external disturbances of up to 60~N, and maintain balance on challenging terrains such as uneven surfaces, and outdoor environments.
Online Omnidirectional Jumping Trajectory Planning for Quadrupedal Robots on Uneven Terrains
Nov 07, 2024Natural terrain complexity often necessitates agile movements like jumping in animals to improve traversal efficiency. To enable similar capabilities in quadruped robots, complex real-time jumping maneuvers are required. Current research does not adequately address the problem of online omnidirectional jumping and neglects the robot's kinodynamic constraints during trajectory generation. This paper proposes a general and complete cascade online optimization framework for omnidirectional jumping for quadruped robots. Our solution systematically encompasses jumping trajectory generation, a trajectory tracking controller, and a landing controller. It also incorporates environmental perception to navigate obstacles that standard locomotion cannot bypass, such as jumping from high platforms. We introduce a novel jumping plane to parameterize omnidirectional jumping motion and formulate a tightly coupled optimization problem accounting for the kinodynamic constraints, simultaneously optimizing CoM trajectory, Ground Reaction Forces (GRFs), and joint states. To meet the online requirements, we propose an accelerated evolutionary algorithm as the trajectory optimizer to address the complexity of kinodynamic constraints. To ensure stability and accuracy in environmental perception post-landing, we introduce a coarse-to-fine relocalization method that combines global Branch and Bound (BnB) search with Maximum a Posteriori (MAP) estimation for precise positioning during navigation and jumping. The proposed framework achieves jump trajectory generation in approximately 0.1 seconds with a warm start and has been successfully validated on two quadruped robots on uneven terrains. Additionally, we extend the framework's versatility to humanoid robots.
Traversability-Aware Legged Navigation by Learning from Real-World Visual Data
Oct 14, 2024The enhanced mobility brought by legged locomotion empowers quadrupedal robots to navigate through complex and unstructured environments. However, optimizing agile locomotion while accounting for the varying energy costs of traversing different terrains remains an open challenge. Most previous work focuses on planning trajectories with traversability cost estimation based on human-labeled environmental features. However, this human-centric approach is insufficient because it does not account for the varying capabilities of the robot locomotion controllers over challenging terrains. To address this, we develop a novel traversability estimator in a robot-centric manner, based on the value function of the robot's locomotion controller. This estimator is integrated into a new learning-based RGBD navigation framework. The framework develops a planner that guides the robot in avoiding obstacles and hard-to-traverse terrains while reaching its goals. The training of the navigation planner is directly performed in the real world using a sample efficient reinforcement learning method. Through extensive benchmarking, we demonstrate that the proposed framework achieves the best performance in accurate traversability cost estimation and efficient learning from multi-modal data (the robot's color and depth vision, and proprioceptive feedback) for real-world training. Using the proposed method, a quadrupedal robot learns to perform traversability-aware navigation through trial and error in various real-world environments with challenging terrains that are difficult to classify using depth vision alone.
Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion
Jul 14, 2024Model Predictive Control (MPC) relies heavily on the robot model for its control law. However, a gap always exists between the reduced-order control model with uncertainties and the real robot, which degrades its performance. To address this issue, we propose the controller of integrating a data-driven error model into traditional MPC for quadruped robots. Our approach leverages real-world data from sensors to compensate for defects in the control model. Specifically, we employ the Autoregressive Moving Average Vector (ARMAV) model to construct the state error model of the quadruped robot using data. The predicted state errors are then used to adjust the predicted future robot states generated by MPC. By such an approach, our proposed controller can provide more accurate inputs to the system, enabling it to achieve desired states even in the presence of model parameter inaccuracies or disturbances. The proposed controller exhibits the capability to partially eliminate the disparity between the model and the real-world robot, thereby enhancing the locomotion performance of quadruped robots. We validate our proposed method through simulations and real-world experimental trials on a large-size quadruped robot that involves carrying a 20 kg un-modeled payload (84% of body weight).
A Fast Online Omnidirectional Quadrupedal Jumping Framework Via Virtual-Model Control and Minimum Jerk Trajectory Generation
Jun 30, 2024Exploring the limits of quadruped robot agility, particularly in the context of rapid and real-time planning and execution of omnidirectional jump trajectories, presents significant challenges due to the complex dynamics involved, especially when considering significant impulse contacts. This paper introduces a new framework to enable fast, omnidirectional jumping capabilities for quadruped robots. Utilizing minimum jerk technology, the proposed framework efficiently generates jump trajectories that exploit its analytical solutions, ensuring numerical stability and dynamic compatibility with minimal computational resources. The virtual model control is employed to formulate a Quadratic Programming (QP) optimization problem to accurately track the Center of Mass (CoM) trajectories during the jump phase. The whole-body control strategies facilitate precise and compliant landing motion. Moreover, the different jumping phase is triggered by time-schedule. The framework's efficacy is demonstrated through its implementation on an enhanced version of the open-source Mini Cheetah robot. Omnidirectional jumps-including forward, backward, and other directional-were successfully executed, showcasing the robot's capability to perform rapid and consecutive jumps with an average trajectory generation and tracking solution time of merely 50 microseconds.
Evolutionary-Based Online Motion Planning Framework for Quadruped Robot Jumping
Sep 14, 2023Offline evolutionary-based methodologies have supplied a successful motion planning framework for the quadrupedal jump. However, the time-consuming computation caused by massive population evolution in offline evolutionary-based jumping framework significantly limits the popularity in the quadrupedal field. This paper presents a time-friendly online motion planning framework based on meta-heuristic Differential evolution (DE), Latin hypercube sampling, and Configuration space (DLC). The DLC framework establishes a multidimensional optimization problem leveraging centroidal dynamics to determine the ideal trajectory of the center of mass (CoM) and ground reaction forces (GRFs). The configuration space is introduced to the evolutionary optimization in order to condense the searching region. Latin hypercube sampling offers more uniform initial populations of DE under limited sampling points, accelerating away from a local minimum. This research also constructs a collection of pre-motion trajectories as a warm start when the objective state is in the neighborhood of the pre-motion state to drastically reduce the solving time. The proposed methodology is successfully validated via real robot experiments for online jumping trajectory optimization with different jumping motions (e.g., ordinary jumping, flipping, and spinning).