 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVRA: Grounding Discrete-Time Joint Acceleration in Voltage-Constrained Actuation
May 11, 2026Discrete-time joint acceleration constraints are widely used to enforce position and velocity limits. However, under voltage-constrained electric actuators, kinematically admissible accelerations may be physically unrealizable, exposing a missing execution-level abstraction. We propose Voltage-Realizable Acceleration (VRA), a joint-level acceleration interface that grounds kinematic acceleration in voltage-constrained actuator physics by restricting commanded accelerations to voltage-realizable constraints. Hardware experiments on electric actuators and a wheel-legged quadruped show that VRA removes unrealizable accelerations, restores consistent near-constraint execution, and reduces constraint-induced oscillations.
Synergizing Discriminative Exemplars and Self-Refined Experience for MLLM-based In-Context Learning in Medical Diagnosis
Mar 29, 2026General Multimodal Large Language Models (MLLMs) often underperform in capturing domain-specific nuances in medical diagnosis, trailing behind fully supervised baselines. Although fine-tuning provides a remedy, the high costs of expert annotation and massive computational overhead limit its scalability. To bridge this gap without updating the weights of the pre-trained backbone of the MLLM, we propose a Clinician Mimetic Workflow. This is a novel In-Context Learning (ICL) framework designed to synergize Discriminative Exemplar Coreset Selection (DECS) and Self-Refined Experience Summarization (SRES). Specifically, DECS simulates a clinician's ability to reference "anchor cases" by selecting discriminative visual coresets from noisy data at the computational level; meanwhile, SRES mimics the cognition and reflection in clinical diagnosis by distilling diverse rollouts into a dynamic textual Experience Bank. Extensive evaluation across all 12 datasets of the MedMNIST 2D benchmark demonstrates that our method outperforms zero-shot general and medical MLLMs. Simultaneously, it achieves performance levels comparable to fully supervised vision models and domain-specific fine-tuned MLLMs, setting a new benchmark for parameter-efficient medical in-context learning. Our code is available at an anonymous repository: https://anonymous.4open.science/r/Synergizing-Discriminative-Exemplars-and-Self-Refined-Experience-ED74.
Jumping Control for a Quadrupedal Wheeled-Legged Robot via NMPC and DE Optimization
Feb 25, 2026Quadrupedal wheeled-legged robots combine the advantages of legged and wheeled locomotion to achieve superior mobility, but executing dynamic jumps remains a significant challenge due to the additional degrees of freedom introduced by wheeled legs. This paper develops a mini-sized wheeled-legged robot for agile motion and presents a novel motion control framework that integrates the Nonlinear Model Predictive Control (NMPC) for locomotion and the Differential Evolution (DE) based trajectory optimization for jumping in quadrupedal wheeled-legged robots. The proposed controller utilizes wheel motion and locomotion to enhance jumping performance, achieving versatile maneuvers such as vertical jumping, forward jumping, and backflips. Extensive simulations and real-world experiments validate the effectiveness of the framework, demonstrating a forward jump over a 0.12 m obstacle and a vertical jump reaching 0.5 m.
Shared Object Manipulation with a Team of Collaborative Quadrupeds
Oct 01, 2025
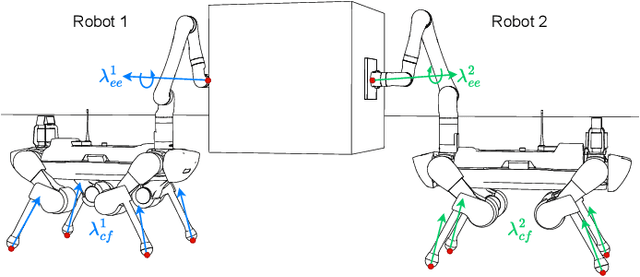
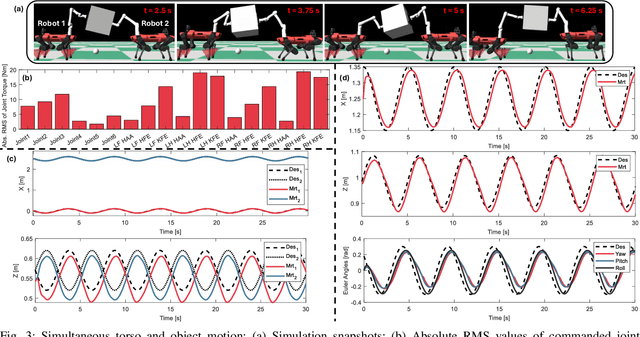
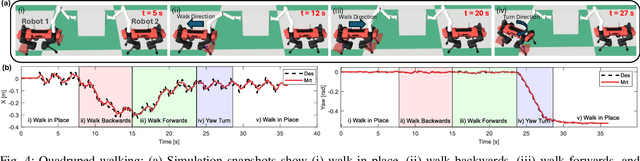
Utilizing teams of multiple robots is advantageous for handling bulky objects. Many related works focus on multi-manipulator systems, which are limited by workspace constraints. In this paper, we extend a classical hybrid motion-force controller to a team of legged manipulator systems, enabling collaborative loco-manipulation of rigid objects with a force-closed grasp. Our novel approach allows the robots to flexibly coordinate their movements, achieving efficient and stable object co-manipulation and transport, validated through extensive simulations and real-world experiments.
Whole-Body Control Framework for Humanoid Robots with Heavy Limbs: A Model-Based Approach
Jun 17, 2025Humanoid robots often face significant balance issues due to the motion of their heavy limbs. These challenges are particularly pronounced when attempting dynamic motion or operating in environments with irregular terrain. To address this challenge, this manuscript proposes a whole-body control framework for humanoid robots with heavy limbs, using a model-based approach that combines a kino-dynamics planner and a hierarchical optimization problem. The kino-dynamics planner is designed as a model predictive control (MPC) scheme to account for the impact of heavy limbs on mass and inertia distribution. By simplifying the robot's system dynamics and constraints, the planner enables real-time planning of motion and contact forces. The hierarchical optimization problem is formulated using Hierarchical Quadratic Programming (HQP) to minimize limb control errors and ensure compliance with the policy generated by the kino-dynamics planner. Experimental validation of the proposed framework demonstrates its effectiveness. The humanoid robot with heavy limbs controlled by the proposed framework can achieve dynamic walking speeds of up to 1.2~m/s, respond to external disturbances of up to 60~N, and maintain balance on challenging terrains such as uneven surfaces, and outdoor environments.
MEDMKG: Benchmarking Medical Knowledge Exploitation with Multimodal Knowledge Graph
May 22, 2025Medical deep learning models depend heavily on domain-specific knowledge to perform well on knowledge-intensive clinical tasks. Prior work has primarily leveraged unimodal knowledge graphs, such as the Unified Medical Language System (UMLS), to enhance model performance. However, integrating multimodal medical knowledge graphs remains largely underexplored, mainly due to the lack of resources linking imaging data with clinical concepts. To address this gap, we propose MEDMKG, a Medical Multimodal Knowledge Graph that unifies visual and textual medical information through a multi-stage construction pipeline. MEDMKG fuses the rich multimodal data from MIMIC-CXR with the structured clinical knowledge from UMLS, utilizing both rule-based tools and large language models for accurate concept extraction and relationship modeling. To ensure graph quality and compactness, we introduce Neighbor-aware Filtering (NaF), a novel filtering algorithm tailored for multimodal knowledge graphs. We evaluate MEDMKG across three tasks under two experimental settings, benchmarking twenty-four baseline methods and four state-of-the-art vision-language backbones on six datasets. Results show that MEDMKG not only improves performance in downstream medical tasks but also offers a strong foundation for developing adaptive and robust strategies for multimodal knowledge integration in medical artificial intelligence.
Online Omnidirectional Jumping Trajectory Planning for Quadrupedal Robots on Uneven Terrains
Nov 07, 2024Natural terrain complexity often necessitates agile movements like jumping in animals to improve traversal efficiency. To enable similar capabilities in quadruped robots, complex real-time jumping maneuvers are required. Current research does not adequately address the problem of online omnidirectional jumping and neglects the robot's kinodynamic constraints during trajectory generation. This paper proposes a general and complete cascade online optimization framework for omnidirectional jumping for quadruped robots. Our solution systematically encompasses jumping trajectory generation, a trajectory tracking controller, and a landing controller. It also incorporates environmental perception to navigate obstacles that standard locomotion cannot bypass, such as jumping from high platforms. We introduce a novel jumping plane to parameterize omnidirectional jumping motion and formulate a tightly coupled optimization problem accounting for the kinodynamic constraints, simultaneously optimizing CoM trajectory, Ground Reaction Forces (GRFs), and joint states. To meet the online requirements, we propose an accelerated evolutionary algorithm as the trajectory optimizer to address the complexity of kinodynamic constraints. To ensure stability and accuracy in environmental perception post-landing, we introduce a coarse-to-fine relocalization method that combines global Branch and Bound (BnB) search with Maximum a Posteriori (MAP) estimation for precise positioning during navigation and jumping. The proposed framework achieves jump trajectory generation in approximately 0.1 seconds with a warm start and has been successfully validated on two quadruped robots on uneven terrains. Additionally, we extend the framework's versatility to humanoid robots.
A Fast Online Omnidirectional Quadrupedal Jumping Framework Via Virtual-Model Control and Minimum Jerk Trajectory Generation
Jun 30, 2024Exploring the limits of quadruped robot agility, particularly in the context of rapid and real-time planning and execution of omnidirectional jump trajectories, presents significant challenges due to the complex dynamics involved, especially when considering significant impulse contacts. This paper introduces a new framework to enable fast, omnidirectional jumping capabilities for quadruped robots. Utilizing minimum jerk technology, the proposed framework efficiently generates jump trajectories that exploit its analytical solutions, ensuring numerical stability and dynamic compatibility with minimal computational resources. The virtual model control is employed to formulate a Quadratic Programming (QP) optimization problem to accurately track the Center of Mass (CoM) trajectories during the jump phase. The whole-body control strategies facilitate precise and compliant landing motion. Moreover, the different jumping phase is triggered by time-schedule. The framework's efficacy is demonstrated through its implementation on an enhanced version of the open-source Mini Cheetah robot. Omnidirectional jumps-including forward, backward, and other directional-were successfully executed, showcasing the robot's capability to perform rapid and consecutive jumps with an average trajectory generation and tracking solution time of merely 50 microseconds.
Evolutionary-Based Online Motion Planning Framework for Quadruped Robot Jumping
Sep 14, 2023Offline evolutionary-based methodologies have supplied a successful motion planning framework for the quadrupedal jump. However, the time-consuming computation caused by massive population evolution in offline evolutionary-based jumping framework significantly limits the popularity in the quadrupedal field. This paper presents a time-friendly online motion planning framework based on meta-heuristic Differential evolution (DE), Latin hypercube sampling, and Configuration space (DLC). The DLC framework establishes a multidimensional optimization problem leveraging centroidal dynamics to determine the ideal trajectory of the center of mass (CoM) and ground reaction forces (GRFs). The configuration space is introduced to the evolutionary optimization in order to condense the searching region. Latin hypercube sampling offers more uniform initial populations of DE under limited sampling points, accelerating away from a local minimum. This research also constructs a collection of pre-motion trajectories as a warm start when the objective state is in the neighborhood of the pre-motion state to drastically reduce the solving time. The proposed methodology is successfully validated via real robot experiments for online jumping trajectory optimization with different jumping motions (e.g., ordinary jumping, flipping, and spinning).
Knowledge is Power: Understanding Causality Makes Legal judgment Prediction Models More Generalizable and Robust
Nov 06, 2022Legal judgment Prediction (LJP), aiming to predict a judgment based on fact descriptions, serves as legal assistance to mitigate the great work burden of limited legal practitioners. Most existing methods apply various large-scale pre-trained language models (PLMs) finetuned in LJP tasks to obtain consistent improvements. However, we discover the fact that the state-of-the-art (SOTA) model makes judgment predictions according to wrong (or non-casual) information, which not only weakens the model's generalization capability but also results in severe social problems like discrimination. Here, we analyze the causal mechanism misleading the LJP model to learn the spurious correlations, and then propose a framework to guide the model to learn the underlying causality knowledge in the legal texts. Specifically, we first perform open information extraction (OIE) to refine the text having a high proportion of causal information, according to which we generate a new set of data. Then, we design a model learning the weights of the refined data and the raw data for LJP model training. The extensive experimental results show that our model is more generalizable and robust than the baselines and achieves a new SOTA performance on two commonly used legal-specific datasets.