 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFree-SurGS: SfM-Free 3D Gaussian Splatting for Surgical Scene Reconstruction
Jul 03, 2024



Real-time 3D reconstruction of surgical scenes plays a vital role in computer-assisted surgery, holding a promise to enhance surgeons' visibility. Recent advancements in 3D Gaussian Splatting (3DGS) have shown great potential for real-time novel view synthesis of general scenes, which relies on accurate poses and point clouds generated by Structure-from-Motion (SfM) for initialization. However, 3DGS with SfM fails to recover accurate camera poses and geometry in surgical scenes due to the challenges of minimal textures and photometric inconsistencies. To tackle this problem, in this paper, we propose the first SfM-free 3DGS-based method for surgical scene reconstruction by jointly optimizing the camera poses and scene representation. Based on the video continuity, the key of our method is to exploit the immediate optical flow priors to guide the projection flow derived from 3D Gaussians. Unlike most previous methods relying on photometric loss only, we formulate the pose estimation problem as minimizing the flow loss between the projection flow and optical flow. A consistency check is further introduced to filter the flow outliers by detecting the rigid and reliable points that satisfy the epipolar geometry. During 3D Gaussian optimization, we randomly sample frames to optimize the scene representations to grow the 3D Gaussian progressively. Experiments on the SCARED dataset demonstrate our superior performance over existing methods in novel view synthesis and pose estimation with high efficiency. Code is available at https://github.com/wrld/Free-SurGS.
LightEA: A Scalable, Robust, and Interpretable Entity Alignment Framework via Three-view Label Propagation
Oct 20, 2022



Entity Alignment (EA) aims to find equivalent entity pairs between KGs, which is the core step of bridging and integrating multi-source KGs. In this paper, we argue that existing GNN-based EA methods inherit the inborn defects from their neural network lineage: weak scalability and poor interpretability. Inspired by recent studies, we reinvent the Label Propagation algorithm to effectively run on KGs and propose a non-neural EA framework -- LightEA, consisting of three efficient components: (i) Random Orthogonal Label Generation, (ii) Three-view Label Propagation, and (iii) Sparse Sinkhorn Iteration. According to the extensive experiments on public datasets, LightEA has impressive scalability, robustness, and interpretability. With a mere tenth of time consumption, LightEA achieves comparable results to state-of-the-art methods across all datasets and even surpasses them on many.
From Alignment to Assignment: Frustratingly Simple Unsupervised Entity Alignment
Sep 15, 2021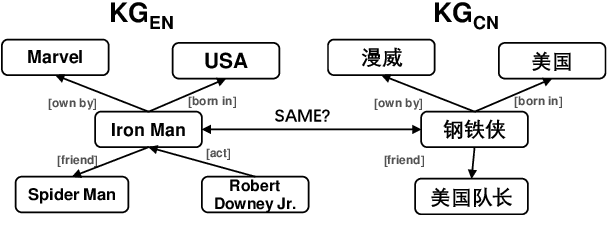


Cross-lingual entity alignment (EA) aims to find the equivalent entities between crosslingual KGs, which is a crucial step for integrating KGs. Recently, many GNN-based EA methods are proposed and show decent performance improvements on several public datasets. Meanwhile, existing GNN-based EA methods inevitably inherit poor interpretability and low efficiency from neural networks. Motivated by the isomorphic assumption of GNNbased methods, we successfully transform the cross-lingual EA problem into the assignment problem. Based on this finding, we propose a frustratingly Simple but Effective Unsupervised entity alignment method (SEU) without neural networks. Extensive experiments show that our proposed unsupervised method even beats advanced supervised methods across all public datasets and has high efficiency, interpretability, and stability.
Are Negative Samples Necessary in Entity Alignment? An Approach with High Performance, Scalability and Robustness
Aug 12, 2021



Entity alignment (EA) aims to find the equivalent entities in different KGs, which is a crucial step in integrating multiple KGs. However, most existing EA methods have poor scalability and are unable to cope with large-scale datasets. We summarize three issues leading to such high time-space complexity in existing EA methods: (1) Inefficient graph encoders, (2) Dilemma of negative sampling, and (3) "Catastrophic forgetting" in semi-supervised learning. To address these challenges, we propose a novel EA method with three new components to enable high Performance, high Scalability, and high Robustness (PSR): (1) Simplified graph encoder with relational graph sampling, (2) Symmetric negative-free alignment loss, and (3) Incremental semi-supervised learning. Furthermore, we conduct detailed experiments on several public datasets to examine the effectiveness and efficiency of our proposed method. The experimental results show that PSR not only surpasses the previous SOTA in performance but also has impressive scalability and robustness.
Boosting the Speed of Entity Alignment 10*: Dual Attention Matching Network with Normalized Hard Sample Mining
Mar 29, 2021


Seeking the equivalent entities among multi-source Knowledge Graphs (KGs) is the pivotal step to KGs integration, also known as \emph{entity alignment} (EA). However, most existing EA methods are inefficient and poor in scalability. A recent summary points out that some of them even require several days to deal with a dataset containing 200,000 nodes (DWY100K). We believe over-complex graph encoder and inefficient negative sampling strategy are the two main reasons. In this paper, we propose a novel KG encoder -- Dual Attention Matching Network (Dual-AMN), which not only models both intra-graph and cross-graph information smartly, but also greatly reduces computational complexity. Furthermore, we propose the Normalized Hard Sample Mining Loss to smoothly select hard negative samples with reduced loss shift. The experimental results on widely used public datasets indicate that our method achieves both high accuracy and high efficiency. On DWY100K, the whole running process of our method could be finished in 1,100 seconds, at least 10* faster than previous work. The performances of our method also outperform previous works across all datasets, where Hits@1 and MRR have been improved from 6% to 13%.
Relational Reflection Entity Alignment
Aug 18, 2020
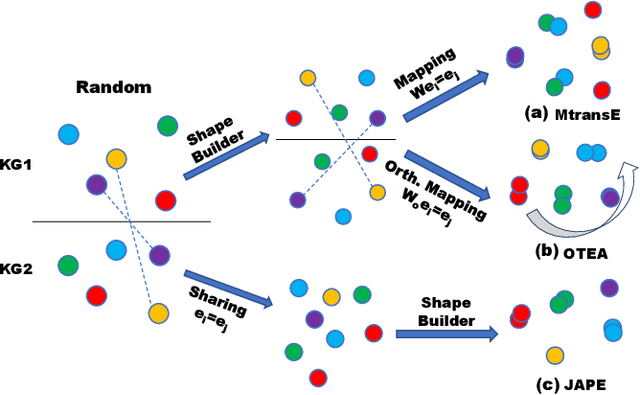
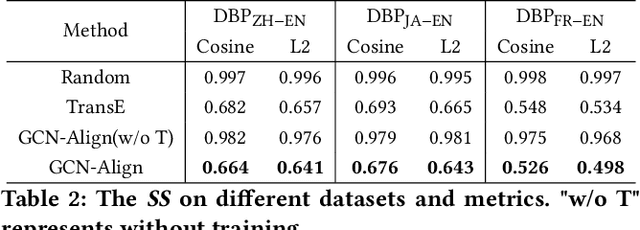
Entity alignment aims to identify equivalent entity pairs from different Knowledge Graphs (KGs), which is essential in integrating multi-source KGs. Recently, with the introduction of GNNs into entity alignment, the architectures of recent models have become more and more complicated. We even find two counter-intuitive phenomena within these methods: (1) The standard linear transformation in GNNs is not working well. (2) Many advanced KG embedding models designed for link prediction task perform poorly in entity alignment. In this paper, we abstract existing entity alignment methods into a unified framework, Shape-Builder & Alignment, which not only successfully explains the above phenomena but also derives two key criteria for an ideal transformation operation. Furthermore, we propose a novel GNNs-based method, Relational Reflection Entity Alignment (RREA). RREA leverages Relational Reflection Transformation to obtain relation specific embeddings for each entity in a more efficient way. The experimental results on real-world datasets show that our model significantly outperforms the state-of-the-art methods, exceeding by 5.8%-10.9% on Hits@1.