 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHINT: Hierarchical Interaction Modeling for Autoregressive Multi-Human Motion Generation
Jan 28, 2026Text-driven multi-human motion generation with complex interactions remains a challenging problem. Despite progress in performance, existing offline methods that generate fixed-length motions with a fixed number of agents, are inherently limited in handling long or variable text, and varying agent counts. These limitations naturally encourage autoregressive formulations, which predict future motions step by step conditioned on all past trajectories and current text guidance. In this work, we introduce HINT, the first autoregressive framework for multi-human motion generation with Hierarchical INTeraction modeling in diffusion. First, HINT leverages a disentangled motion representation within a canonicalized latent space, decoupling local motion semantics from inter-person interactions. This design facilitates direct adaptation to varying numbers of human participants without requiring additional refinement. Second, HINT adopts a sliding-window strategy for efficient online generation, and aggregates local within-window and global cross-window conditions to capture past human history, inter-person dependencies, and align with text guidance. This strategy not only enables fine-grained interaction modeling within each window but also preserves long-horizon coherence across all the long sequence. Extensive experiments on public benchmarks demonstrate that HINT matches the performance of strong offline models and surpasses autoregressive baselines. Notably, on InterHuman, HINT achieves an FID of 3.100, significantly improving over the previous state-of-the-art score of 5.154.
SeaLion: Semantic Part-Aware Latent Point Diffusion Models for 3D Generation
May 23, 2025Denoising diffusion probabilistic models have achieved significant success in point cloud generation, enabling numerous downstream applications, such as generative data augmentation and 3D model editing. However, little attention has been given to generating point clouds with point-wise segmentation labels, as well as to developing evaluation metrics for this task. Therefore, in this paper, we present SeaLion, a novel diffusion model designed to generate high-quality and diverse point clouds with fine-grained segmentation labels. Specifically, we introduce the semantic part-aware latent point diffusion technique, which leverages the intermediate features of the generative models to jointly predict the noise for perturbed latent points and associated part segmentation labels during the denoising process, and subsequently decodes the latent points to point clouds conditioned on part segmentation labels. To effectively evaluate the quality of generated point clouds, we introduce a novel point cloud pairwise distance calculation method named part-aware Chamfer distance (p-CD). This method enables existing metrics, such as 1-NNA, to measure both the local structural quality and inter-part coherence of generated point clouds. Experiments on the large-scale synthetic dataset ShapeNet and real-world medical dataset IntrA demonstrate that SeaLion achieves remarkable performance in generation quality and diversity, outperforming the existing state-of-the-art model, DiffFacto, by 13.33% and 6.52% on 1-NNA (p-CD) across the two datasets. Experimental analysis shows that SeaLion can be trained semi-supervised, thereby reducing the demand for labeling efforts. Lastly, we validate the applicability of SeaLion in generative data augmentation for training segmentation models and the capability of SeaLion to serve as a tool for part-aware 3D shape editing.
FA-BARF: Frequency Adapted Bundle-Adjusting Neural Radiance Fields
Mar 15, 2025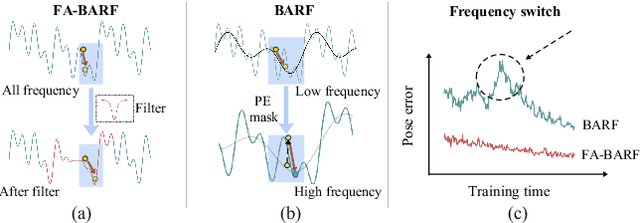
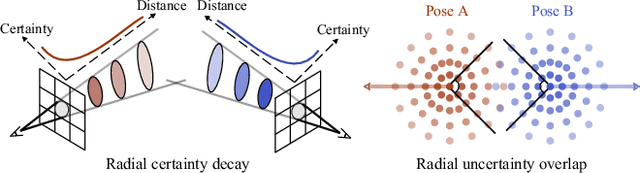
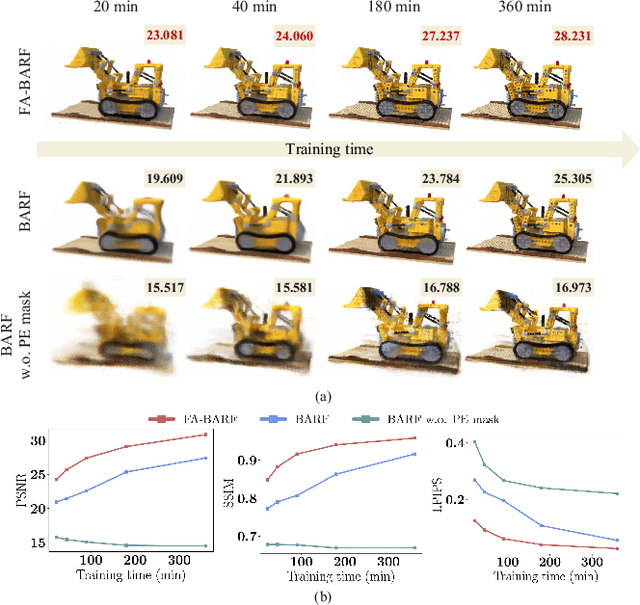
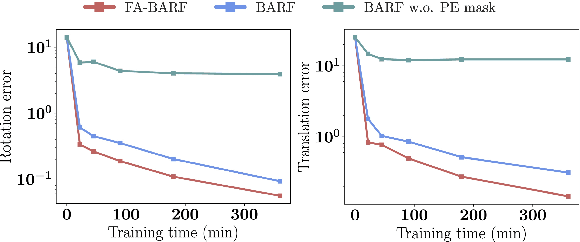
Neural Radiance Fields (NeRF) have exhibited highly effective performance for photorealistic novel view synthesis recently. However, the key limitation it meets is the reliance on a hand-crafted frequency annealing strategy to recover 3D scenes with imperfect camera poses. The strategy exploits a temporal low-pass filter to guarantee convergence while decelerating the joint optimization of implicit scene reconstruction and camera registration. In this work, we introduce the Frequency Adapted Bundle Adjusting Radiance Field (FA-BARF), substituting the temporal low-pass filter for a frequency-adapted spatial low-pass filter to address the decelerating problem. We establish a theoretical framework to interpret the relationship between position encoding of NeRF and camera registration and show that our frequency-adapted filter can mitigate frequency fluctuation caused by the temporal filter. Furthermore, we show that applying a spatial low-pass filter in NeRF can optimize camera poses productively through radial uncertainty overlaps among various views. Extensive experiments show that FA-BARF can accelerate the joint optimization process under little perturbations in object-centric scenes and recover real-world scenes with unknown camera poses. This implies wider possibilities for NeRF applied in dense 3D mapping and reconstruction under real-time requirements. The code will be released upon paper acceptance.
Resolving Symmetry Ambiguity in Correspondence-based Methods for Instance-level Object Pose Estimation
May 17, 2024Estimating the 6D pose of an object from a single RGB image is a critical task that becomes additionally challenging when dealing with symmetric objects. Recent approaches typically establish one-to-one correspondences between image pixels and 3D object surface vertices. However, the utilization of one-to-one correspondences introduces ambiguity for symmetric objects. To address this, we propose SymCode, a symmetry-aware surface encoding that encodes the object surface vertices based on one-to-many correspondences, eliminating the problem of one-to-one correspondence ambiguity. We also introduce SymNet, a fast end-to-end network that directly regresses the 6D pose parameters without solving a PnP problem. We demonstrate faster runtime and comparable accuracy achieved by our method on the T-LESS and IC-BIN benchmarks of mostly symmetric objects. Our source code will be released upon acceptance.
EchoScene: Indoor Scene Generation via Information Echo over Scene Graph Diffusion
May 02, 2024We present EchoScene, an interactive and controllable generative model that generates 3D indoor scenes on scene graphs. EchoScene leverages a dual-branch diffusion model that dynamically adapts to scene graphs. Existing methods struggle to handle scene graphs due to varying numbers of nodes, multiple edge combinations, and manipulator-induced node-edge operations. EchoScene overcomes this by associating each node with a denoising process and enables collaborative information exchange, enhancing controllable and consistent generation aware of global constraints. This is achieved through an information echo scheme in both shape and layout branches. At every denoising step, all processes share their denoising data with an information exchange unit that combines these updates using graph convolution. The scheme ensures that the denoising processes are influenced by a holistic understanding of the scene graph, facilitating the generation of globally coherent scenes. The resulting scenes can be manipulated during inference by editing the input scene graph and sampling the noise in the diffusion model. Extensive experiments validate our approach, which maintains scene controllability and surpasses previous methods in generation fidelity. Moreover, the generated scenes are of high quality and thus directly compatible with off-the-shelf texture generation. Code and trained models are open-sourced.
KP-RED: Exploiting Semantic Keypoints for Joint 3D Shape Retrieval and Deformation
Mar 20, 2024


In this paper, we present KP-RED, a unified KeyPoint-driven REtrieval and Deformation framework that takes object scans as input and jointly retrieves and deforms the most geometrically similar CAD models from a pre-processed database to tightly match the target. Unlike existing dense matching based methods that typically struggle with noisy partial scans, we propose to leverage category-consistent sparse keypoints to naturally handle both full and partial object scans. Specifically, we first employ a lightweight retrieval module to establish a keypoint-based embedding space, measuring the similarity among objects by dynamically aggregating deformation-aware local-global features around extracted keypoints. Objects that are close in the embedding space are considered similar in geometry. Then we introduce the neural cage-based deformation module that estimates the influence vector of each keypoint upon cage vertices inside its local support region to control the deformation of the retrieved shape. Extensive experiments on the synthetic dataset PartNet and the real-world dataset Scan2CAD demonstrate that KP-RED surpasses existing state-of-the-art approaches by a large margin. Codes and trained models will be released in https://github.com/lolrudy/KP-RED.
GeoGaussian: Geometry-aware Gaussian Splatting for Scene Rendering
Mar 17, 2024



During the Gaussian Splatting optimization process, the scene's geometry can gradually deteriorate if its structure is not deliberately preserved, especially in non-textured regions such as walls, ceilings, and furniture surfaces. This degradation significantly affects the rendering quality of novel views that deviate significantly from the viewpoints in the training data. To mitigate this issue, we propose a novel approach called GeoGaussian. Based on the smoothly connected areas observed from point clouds, this method introduces a novel pipeline to initialize thin Gaussians aligned with the surfaces, where the characteristic can be transferred to new generations through a carefully designed densification strategy. Finally, the pipeline ensures that the scene's geometry and texture are maintained through constrained optimization processes with explicit geometry constraints. Benefiting from the proposed architecture, the generative ability of 3D Gaussians is enhanced, especially in structured regions. Our proposed pipeline achieves state-of-the-art performance in novel view synthesis and geometric reconstruction, as evaluated qualitatively and quantitatively on public datasets.
FMGS: Foundation Model Embedded 3D Gaussian Splatting for Holistic 3D Scene Understanding
Jan 03, 2024



Precisely perceiving the geometric and semantic properties of real-world 3D objects is crucial for the continued evolution of augmented reality and robotic applications. To this end, we present \algfull{} (\algname{}), which incorporates vision-language embeddings of foundation models into 3D Gaussian Splatting (GS). The key contribution of this work is an efficient method to reconstruct and represent 3D vision-language models. This is achieved by distilling feature maps generated from image-based foundation models into those rendered from our 3D model. To ensure high-quality rendering and fast training, we introduce a novel scene representation by integrating strengths from both GS and multi-resolution hash encodings (MHE). Our effective training procedure also introduces a pixel alignment loss that makes the rendered feature distance of same semantic entities close, following the pixel-level semantic boundaries. Our results demonstrate remarkable multi-view semantic consistency, facilitating diverse downstream tasks, beating state-of-the-art methods by $\mathbf{10.2}$ percent on open-vocabulary language-based object detection, despite that we are $\mathbf{851\times}$ faster for inference. This research explores the intersection of vision, language, and 3D scene representation, paving the way for enhanced scene understanding in uncontrolled real-world environments. We plan to release the code upon paper acceptance.
HACD: Hand-Aware Conditional Diffusion for Monocular Hand-Held Object Reconstruction
Nov 23, 2023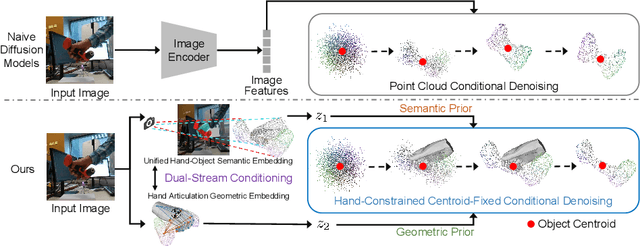
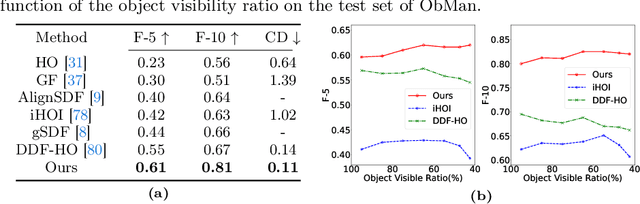
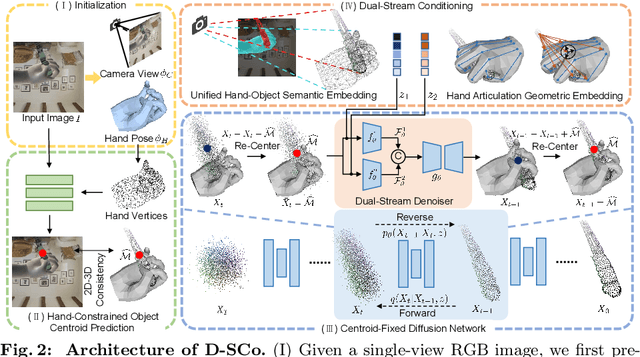
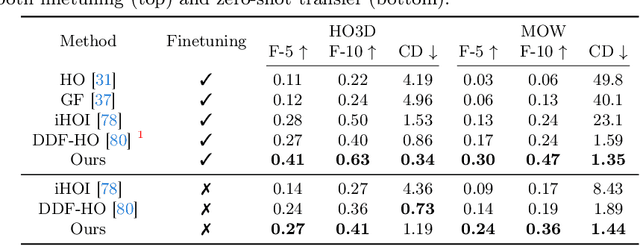
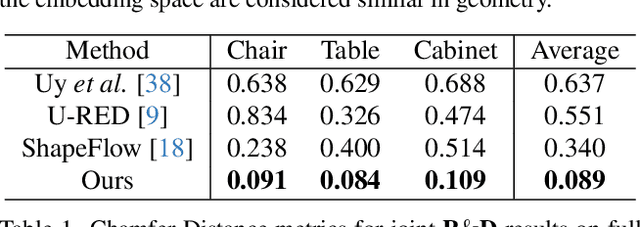
Reconstructing hand-held objects from a single RGB image without known 3D object templates, category prior, or depth information is a vital yet challenging problem in computer vision. In contrast to prior works that utilize deterministic modeling paradigms, which make it hard to account for the uncertainties introduced by hand- and self-occlusion, we employ a probabilistic point cloud denoising diffusion model to tackle the above challenge. In this work, we present Hand-Aware Conditional Diffusion for monocular hand-held object reconstruction (HACD), modeling the hand-object interaction in two aspects. First, we introduce hand-aware conditioning to model hand-object interaction from both semantic and geometric perspectives. Specifically, a unified hand-object semantic embedding compensates for the 2D local feature deficiency induced by hand occlusion, and a hand articulation embedding further encodes the relationship between object vertices and hand joints. Second, we propose a hand-constrained centroid fixing scheme, which utilizes hand vertices priors to restrict the centroid deviation of partially denoised point cloud during diffusion and reverse process. Removing the centroid bias interference allows the diffusion models to focus on the reconstruction of shape, thus enhancing the stability and precision of local feature projection. Experiments on the synthetic ObMan dataset and two real-world datasets, HO3D and MOW, demonstrate our approach surpasses all existing methods by a large margin.
HiPose: Hierarchical Binary Surface Encoding and Correspondence Pruning for RGB-D 6DoF Object Pose Estimation
Nov 21, 2023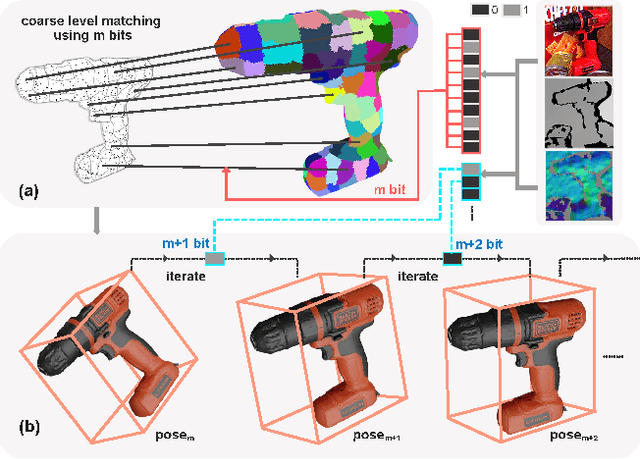
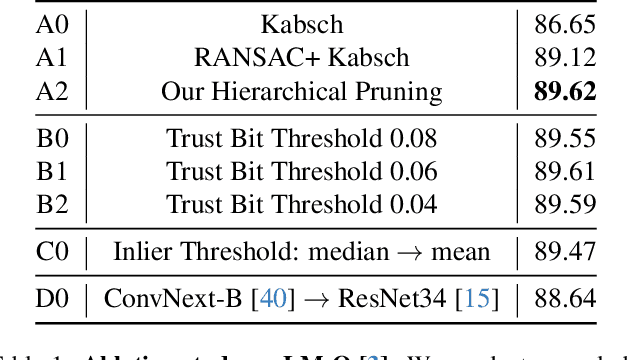
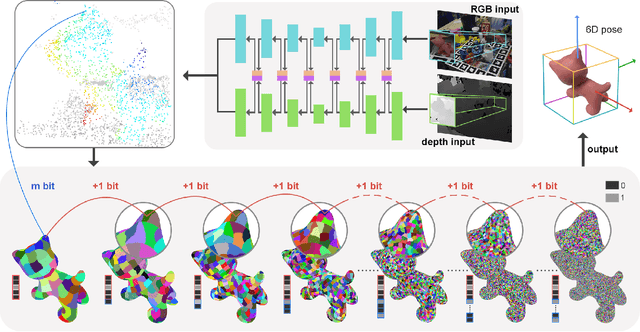
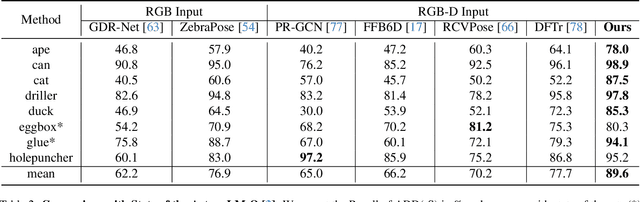
In this work, we present a novel dense-correspondence method for 6DoF object pose estimation from a single RGB-D image. While many existing data-driven methods achieve impressive performance, they tend to be time-consuming due to their reliance on rendering-based refinement approaches. To circumvent this limitation, we present HiPose, which establishes 3D-3D correspondences in a coarse-to-fine manner with a hierarchical binary surface encoding. Unlike previous dense-correspondence methods, we estimate the correspondence surface by employing point-to-surface matching and iteratively constricting the surface until it becomes a correspondence point while gradually removing outliers. Extensive experiments on public benchmarks LM-O, YCB-V, and T-Less demonstrate that our method surpasses all refinement-free methods and is even on par with expensive refinement-based approaches. Crucially, our approach is computationally efficient and enables real-time critical applications with high accuracy requirements. Code and models will be released.