 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResolving Symmetry Ambiguity in Correspondence-based Methods for Instance-level Object Pose Estimation
May 17, 2024Estimating the 6D pose of an object from a single RGB image is a critical task that becomes additionally challenging when dealing with symmetric objects. Recent approaches typically establish one-to-one correspondences between image pixels and 3D object surface vertices. However, the utilization of one-to-one correspondences introduces ambiguity for symmetric objects. To address this, we propose SymCode, a symmetry-aware surface encoding that encodes the object surface vertices based on one-to-many correspondences, eliminating the problem of one-to-one correspondence ambiguity. We also introduce SymNet, a fast end-to-end network that directly regresses the 6D pose parameters without solving a PnP problem. We demonstrate faster runtime and comparable accuracy achieved by our method on the T-LESS and IC-BIN benchmarks of mostly symmetric objects. Our source code will be released upon acceptance.
HiPose: Hierarchical Binary Surface Encoding and Correspondence Pruning for RGB-D 6DoF Object Pose Estimation
Nov 21, 2023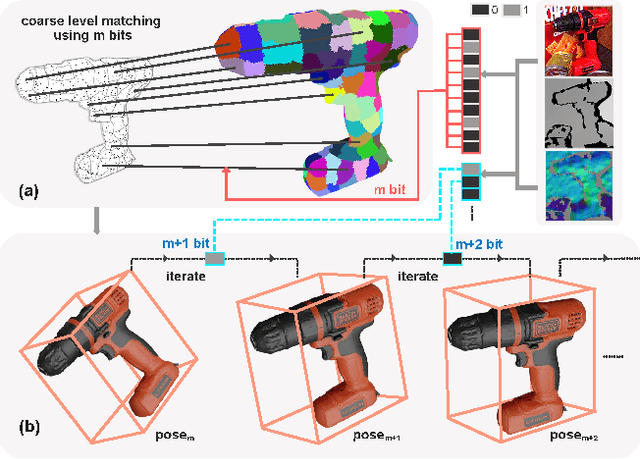
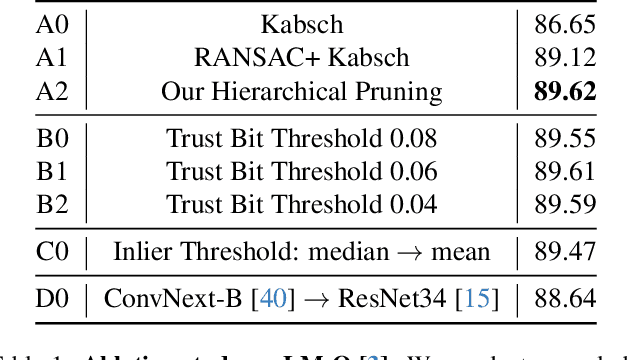
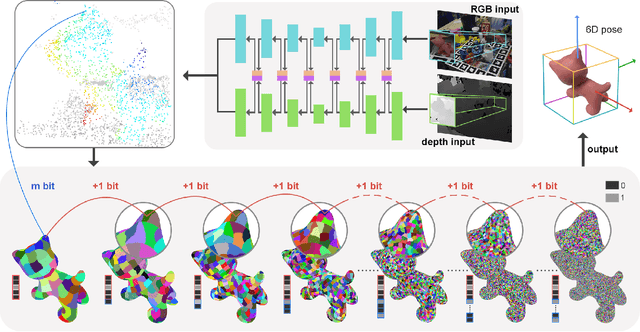
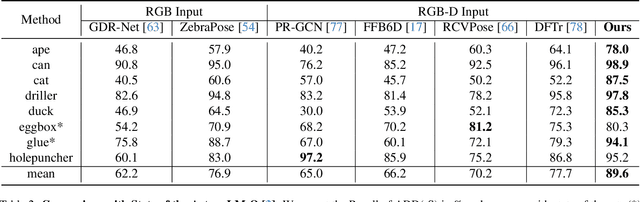
In this work, we present a novel dense-correspondence method for 6DoF object pose estimation from a single RGB-D image. While many existing data-driven methods achieve impressive performance, they tend to be time-consuming due to their reliance on rendering-based refinement approaches. To circumvent this limitation, we present HiPose, which establishes 3D-3D correspondences in a coarse-to-fine manner with a hierarchical binary surface encoding. Unlike previous dense-correspondence methods, we estimate the correspondence surface by employing point-to-surface matching and iteratively constricting the surface until it becomes a correspondence point while gradually removing outliers. Extensive experiments on public benchmarks LM-O, YCB-V, and T-Less demonstrate that our method surpasses all refinement-free methods and is even on par with expensive refinement-based approaches. Crucially, our approach is computationally efficient and enables real-time critical applications with high accuracy requirements. Code and models will be released.