 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResolving Symmetry Ambiguity in Correspondence-based Methods for Instance-level Object Pose Estimation
May 17, 2024Estimating the 6D pose of an object from a single RGB image is a critical task that becomes additionally challenging when dealing with symmetric objects. Recent approaches typically establish one-to-one correspondences between image pixels and 3D object surface vertices. However, the utilization of one-to-one correspondences introduces ambiguity for symmetric objects. To address this, we propose SymCode, a symmetry-aware surface encoding that encodes the object surface vertices based on one-to-many correspondences, eliminating the problem of one-to-one correspondence ambiguity. We also introduce SymNet, a fast end-to-end network that directly regresses the 6D pose parameters without solving a PnP problem. We demonstrate faster runtime and comparable accuracy achieved by our method on the T-LESS and IC-BIN benchmarks of mostly symmetric objects. Our source code will be released upon acceptance.
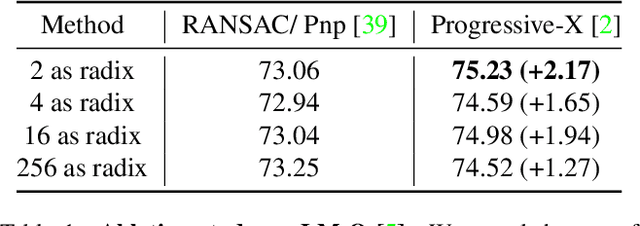
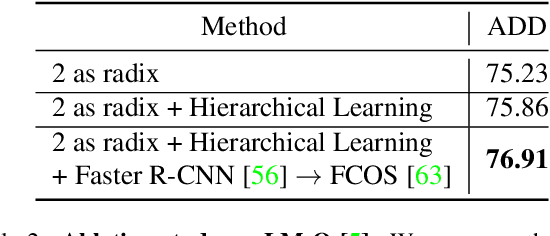
HiPose: Hierarchical Binary Surface Encoding and Correspondence Pruning for RGB-D 6DoF Object Pose Estimation
Nov 21, 2023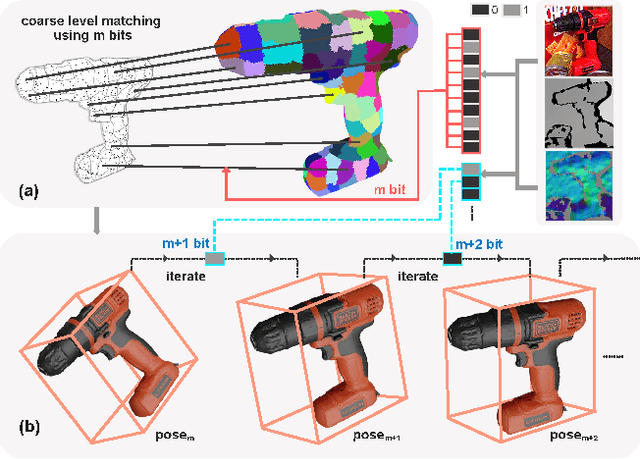
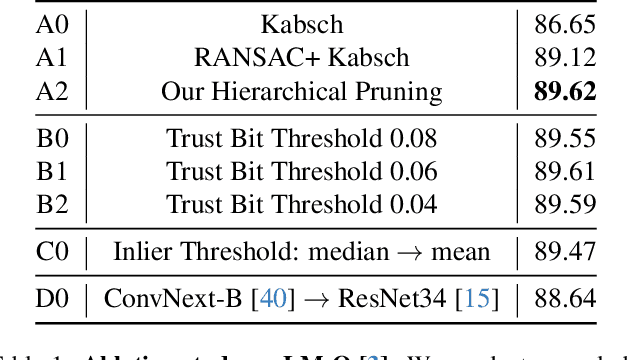
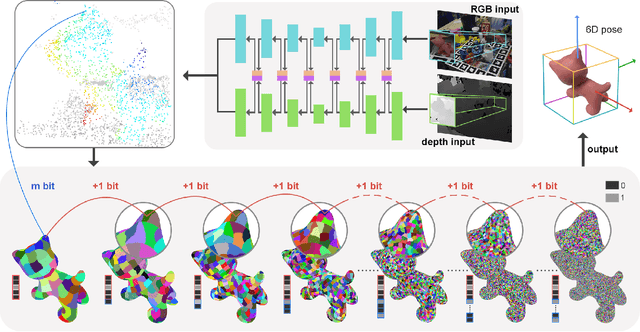
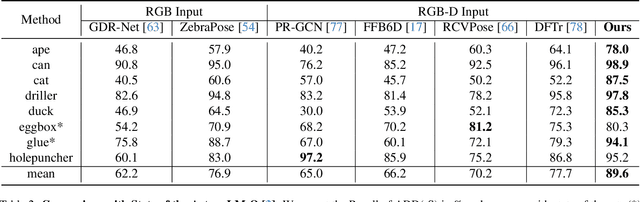
In this work, we present a novel dense-correspondence method for 6DoF object pose estimation from a single RGB-D image. While many existing data-driven methods achieve impressive performance, they tend to be time-consuming due to their reliance on rendering-based refinement approaches. To circumvent this limitation, we present HiPose, which establishes 3D-3D correspondences in a coarse-to-fine manner with a hierarchical binary surface encoding. Unlike previous dense-correspondence methods, we estimate the correspondence surface by employing point-to-surface matching and iteratively constricting the surface until it becomes a correspondence point while gradually removing outliers. Extensive experiments on public benchmarks LM-O, YCB-V, and T-Less demonstrate that our method surpasses all refinement-free methods and is even on par with expensive refinement-based approaches. Crucially, our approach is computationally efficient and enables real-time critical applications with high accuracy requirements. Code and models will be released.
U-RED: Unsupervised 3D Shape Retrieval and Deformation for Partial Point Clouds
Aug 11, 2023

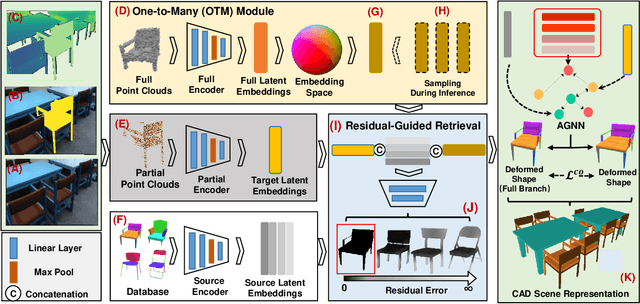

In this paper, we propose U-RED, an Unsupervised shape REtrieval and Deformation pipeline that takes an arbitrary object observation as input, typically captured by RGB images or scans, and jointly retrieves and deforms the geometrically similar CAD models from a pre-established database to tightly match the target. Considering existing methods typically fail to handle noisy partial observations, U-RED is designed to address this issue from two aspects. First, since one partial shape may correspond to multiple potential full shapes, the retrieval method must allow such an ambiguous one-to-many relationship. Thereby U-RED learns to project all possible full shapes of a partial target onto the surface of a unit sphere. Then during inference, each sampling on the sphere will yield a feasible retrieval. Second, since real-world partial observations usually contain noticeable noise, a reliable learned metric that measures the similarity between shapes is necessary for stable retrieval. In U-RED, we design a novel point-wise residual-guided metric that allows noise-robust comparison. Extensive experiments on the synthetic datasets PartNet, ComplementMe and the real-world dataset Scan2CAD demonstrate that U-RED surpasses existing state-of-the-art approaches by 47.3%, 16.7% and 31.6% respectively under Chamfer Distance.
OPA-3D: Occlusion-Aware Pixel-Wise Aggregation for Monocular 3D Object Detection
Nov 02, 2022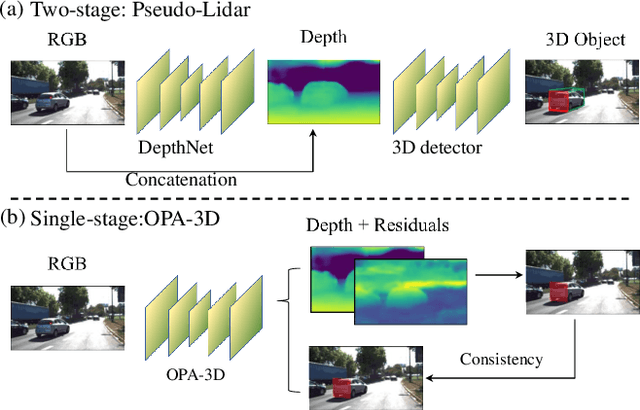



Despite monocular 3D object detection having recently made a significant leap forward thanks to the use of pre-trained depth estimators for pseudo-LiDAR recovery, such two-stage methods typically suffer from overfitting and are incapable of explicitly encapsulating the geometric relation between depth and object bounding box. To overcome this limitation, we instead propose OPA-3D, a single-stage, end-to-end, Occlusion-Aware Pixel-Wise Aggregation network that to jointly estimate dense scene depth with depth-bounding box residuals and object bounding boxes, allowing a two-stream detection of 3D objects, leading to significantly more robust detections. Thereby, the geometry stream denoted as the Geometry Stream, combines visible depth and depth-bounding box residuals to recover the object bounding box via explicit occlusion-aware optimization. In addition, a bounding box based geometry projection scheme is employed in an effort to enhance distance perception. The second stream, named as the Context Stream, directly regresses 3D object location and size. This novel two-stream representation further enables us to enforce cross-stream consistency terms which aligns the outputs of both streams, improving the overall performance. Extensive experiments on the public benchmark demonstrate that OPA-3D outperforms state-of-the-art methods on the main Car category, whilst keeping a real-time inference speed. We plan to release all codes and trained models soon.
ZebraPose: Coarse to Fine Surface Encoding for 6DoF Object Pose Estimation
Mar 29, 2022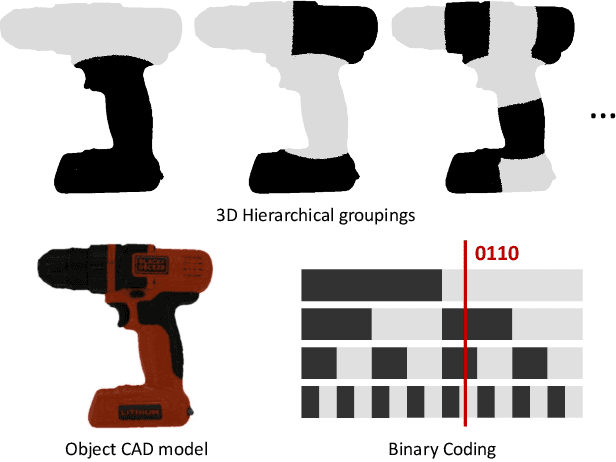
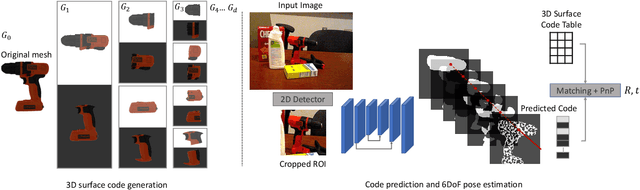
Establishing correspondences from image to 3D has been a key task of 6DoF object pose estimation for a long time. To predict pose more accurately, deeply learned dense maps replaced sparse templates. Dense methods also improved pose estimation in the presence of occlusion. More recently researchers have shown improvements by learning object fragments as segmentation. In this work, we present a discrete descriptor, which can represent the object surface densely. By incorporating a hierarchical binary grouping, we can encode the object surface very efficiently. Moreover, we propose a coarse to fine training strategy, which enables fine-grained correspondence prediction. Finally, by matching predicted codes with object surface and using a PnP solver, we estimate the 6DoF pose. Results on the public LM-O and YCB-V datasets show major improvement over the state of the art w.r.t. ADD(-S) metric, even surpassing RGB-D based methods in some cases.
IKEA Object State Dataset: A 6DoF object pose estimation dataset and benchmark for multi-state assembly objects
Nov 16, 2021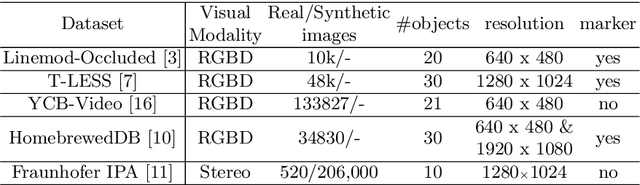

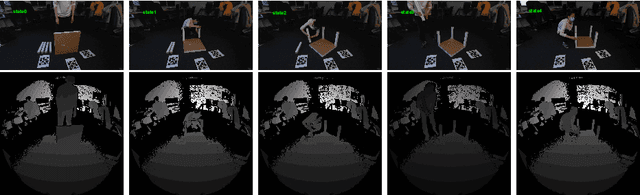
Utilizing 6DoF(Degrees of Freedom) pose information of an object and its components is critical for object state detection tasks. We present IKEA Object State Dataset, a new dataset that contains IKEA furniture 3D models, RGBD video of the assembly process, the 6DoF pose of furniture parts and their bounding box. The proposed dataset will be available at https://github.com/mxllmx/IKEAObjectStateDataset.