 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeU-RED: Unsupervised 3D Shape Retrieval and Deformation for Partial Point Clouds
Paper and Code


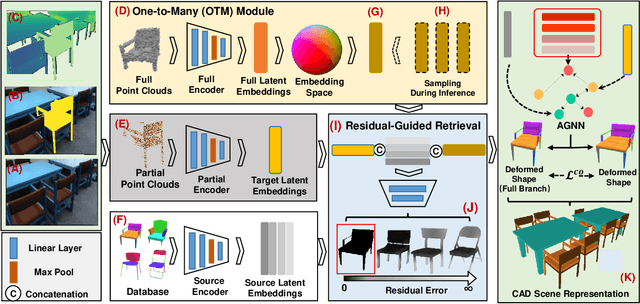

In this paper, we propose U-RED, an Unsupervised shape REtrieval and Deformation pipeline that takes an arbitrary object observation as input, typically captured by RGB images or scans, and jointly retrieves and deforms the geometrically similar CAD models from a pre-established database to tightly match the target. Considering existing methods typically fail to handle noisy partial observations, U-RED is designed to address this issue from two aspects. First, since one partial shape may correspond to multiple potential full shapes, the retrieval method must allow such an ambiguous one-to-many relationship. Thereby U-RED learns to project all possible full shapes of a partial target onto the surface of a unit sphere. Then during inference, each sampling on the sphere will yield a feasible retrieval. Second, since real-world partial observations usually contain noticeable noise, a reliable learned metric that measures the similarity between shapes is necessary for stable retrieval. In U-RED, we design a novel point-wise residual-guided metric that allows noise-robust comparison. Extensive experiments on the synthetic datasets PartNet, ComplementMe and the real-world dataset Scan2CAD demonstrate that U-RED surpasses existing state-of-the-art approaches by 47.3%, 16.7% and 31.6% respectively under Chamfer Distance.