 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFA-BARF: Frequency Adapted Bundle-Adjusting Neural Radiance Fields
Mar 15, 2025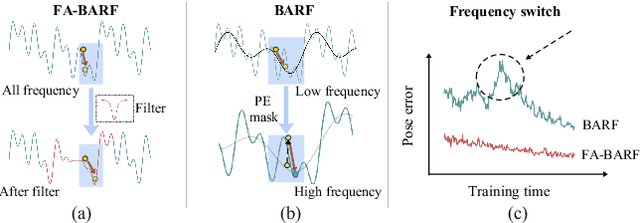
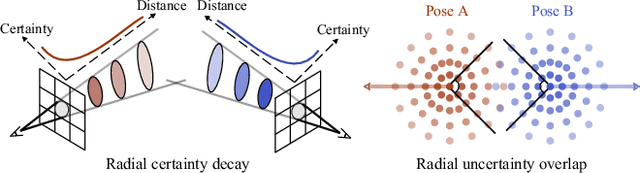
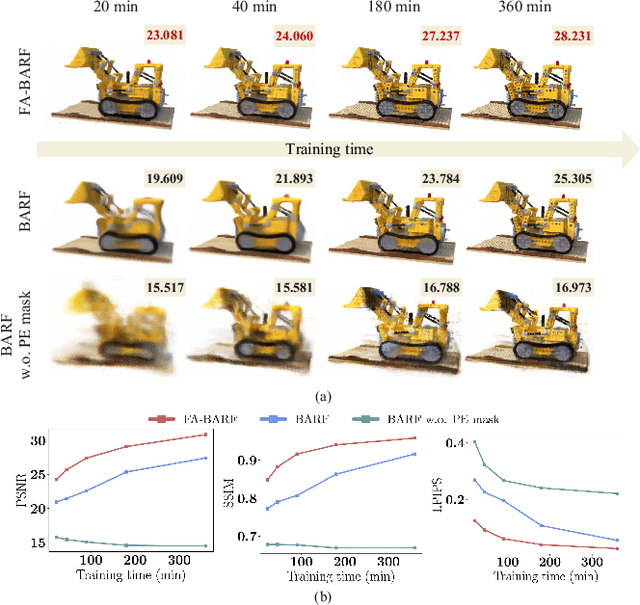
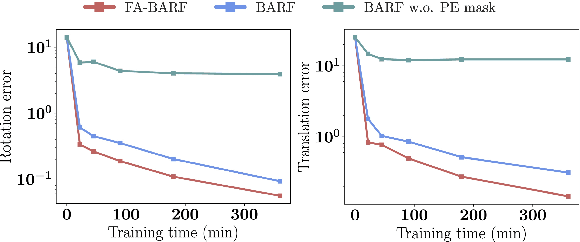
Neural Radiance Fields (NeRF) have exhibited highly effective performance for photorealistic novel view synthesis recently. However, the key limitation it meets is the reliance on a hand-crafted frequency annealing strategy to recover 3D scenes with imperfect camera poses. The strategy exploits a temporal low-pass filter to guarantee convergence while decelerating the joint optimization of implicit scene reconstruction and camera registration. In this work, we introduce the Frequency Adapted Bundle Adjusting Radiance Field (FA-BARF), substituting the temporal low-pass filter for a frequency-adapted spatial low-pass filter to address the decelerating problem. We establish a theoretical framework to interpret the relationship between position encoding of NeRF and camera registration and show that our frequency-adapted filter can mitigate frequency fluctuation caused by the temporal filter. Furthermore, we show that applying a spatial low-pass filter in NeRF can optimize camera poses productively through radial uncertainty overlaps among various views. Extensive experiments show that FA-BARF can accelerate the joint optimization process under little perturbations in object-centric scenes and recover real-world scenes with unknown camera poses. This implies wider possibilities for NeRF applied in dense 3D mapping and reconstruction under real-time requirements. The code will be released upon paper acceptance.
Rethinking Closed-loop Planning Framework for Imitation-based Model Integrating Prediction and Planning
Jul 07, 2024In recent years, the integration of prediction and planning through neural networks has received substantial attention. Despite extensive studies on it, there is a noticeable gap in understanding the operation of such models within a closed-loop planning setting. To bridge this gap, we propose a novel closed-loop planning framework compatible with neural networks engaged in joint prediction and planning. The framework contains two running modes, namely planning and safety monitoring, wherein the neural network performs Motion Prediction and Planning (MPP) and Conditional Motion Prediction (CMP) correspondingly without altering architecture. We evaluate the efficacy of our framework using the nuPlan dataset and its simulator, conducting closed-loop experiments across diverse scenarios. The results demonstrate that the proposed framework ensures the feasibility and local stability of the planning process while maintaining safety with CMP safety monitoring. Compared to other learning-based methods, our approach achieves substantial improvement.