 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeS2ED: From Story to Executable Descriptions for Consistency-Aware Story Illustration
May 21, 2026Multi-frame story illustration requires long-horizon coherence beyond single-image text-to-image generation, including narrative decomposition and persistent character identity, layout, and affect across frames. We propose Story-to-Executable Descriptions (S2ED), a training-free, model-agnostic, prompt-layer framework that converts a full story into a sequence of explicit, editable executable descriptions for more consistent rendering. S2ED coordinates three agents to segment the narrative, ground canonical character attributes, and enrich spatial and affective cues, enabling interpretable prompt-carried state propagation and local edits to repair drift without retraining the generator. Experiments on Flintstones and Shakoo Maku show that S2ED improves sequence-level consistency and character fidelity over strong prompting, large-model planning, and a reference training-based method, under both automatic metrics and human judgments. We also deploy S2ED in an end-to-end story-to-storybook system for children's illustrated stories, with a supplementary video.
Energy-Efficient Hybrid Data Computation via Coordinated AirComp and Edge Offloading
Apr 11, 2026The development of 6G networks brings an increasing variety of data services, which motivates the hybrid computation paradigm that coordinates the over-the-air computation (AirComp) and edge computing for diverse and effective data processing. In this paper, we address this emerging issue of hybrid data computation from an energy-efficiency perspective, where the coexistence of both types induces resource competition and interference, and thus complicates the network management. Accordingly, we formulate the problem to minimize the overall energy consumption including the data transmission and computation, subject to the offloading capacity and aggregation accuracy. We then propose a block coordinate descent framework that decomposes and solves the subproblems including the user scheduling, power control, and transceiver scaling, which are then iterated towards a coordinated hybrid computation solution. Simulation results confirm that our coordinated approach achieves significant energy savings compared to baseline strategies, demonstrating its effectiveness in creating a well-coordinated and sustainable hybrid computing environment.
PhysVideo: Physically Plausible Video Generation with Cross-View Geometry Guidance
Mar 19, 2026Recent progress in video generation has led to substantial improvements in visual fidelity, yet ensuring physically consistent motion remains a fundamental challenge. Intuitively, this limitation can be attributed to the fact that real-world object motion unfolds in three-dimensional space, while video observations provide only partial, view-dependent projections of such dynamics. To address these issues, we propose PhysVideo, a two-stage framework that first generates physics-aware orthogonal foreground videos and then synthesizes full videos with background. In the first stage, Phys4View leverages physics-aware attention to capture the influence of physical attributes on motion dynamics, and enhances spatio-temporal consistency by incorporating geometry-enhanced cross-view attention and temporal attention. In the second stage, VideoSyn uses the generated foreground videos as guidance and learns the interactions between foreground dynamics and background context for controllable video synthesis. To support training, we construct PhysMV, a dataset containing 40K scenes, each consisting of four orthogonal viewpoints, resulting in a total of 160K video sequences. Extensive experiments demonstrate that PhysVideo significantly improves physical realism and spatial-temporal coherence over existing video generation methods. Home page: https://anonymous.4open.science/w/Phys4D/.
Channel-Aware Conditional Diffusion Model for Secure MU-MISO Communications
Feb 03, 2026While information securityis a fundamental requirement for wireless communications, conventional optimization based approaches often struggle with real-time implementation, and deep models, typically discriminative in nature, may lack the ability to cope with unforeseen scenarios. To address this challenge, this paper investigates the design of legitimate beamforming and artificial noise (AN) to achieve physical layer security by exploiting the conditional diffusion model. Specifically, we reformulate the security optimization as a conditional generative process, using a diffusion model to learn the inherent distribution of near-optimal joint beamforming and AN strategies. We employ a U-Net architecture with cross-attention to integrate channel state information, as the basis for the generative process. Moreover, we fine-tune the trained model using an objective incorporating the sum secrecy rate such that the security performance is further enhanced. Finally, simulation results validate the learning process convergence and demonstrate that the proposed generative method achieves superior secrecy performance across various scenarios as compared with the baselines.
Active RIS-Aided Anti-Jamming Wireless Communications: A Stackelberg Game Perspective
Dec 19, 2025The pervasive threat of jamming attacks, particularly from adaptive jammers capable of optimizing their strategies, poses a significant challenge to the security and reliability of wireless communications. This paper addresses this issue by investigating anti-jamming communications empowered by an active reconfigurable intelligent surface. The strategic interaction between the legitimate system and the adaptive jammer is modeled as a Stackelberg game, where the legitimate user, acting as the leader, proactively designs its strategy while anticipating the jammer's optimal response. We prove the existence of the Stackelberg equilibrium and derive it using a backward induction method. Particularly, the jammer's optimal strategy is embedded into the leader's problem, resulting in a bi-level optimization that jointly considers legitimate transmit power, transmit/receive beamformers, and active reflection. We tackle this complex, non-convex problem by using a block coordinate descent framework, wherein subproblems are iteratively solved via convex relaxation and successive convex approximation techniques. Simulation results demonstrate the significant superiority of the proposed active RIS-assisted scheme in enhancing legitimate transmissions and degrading jamming effects compared to baseline schemes across various scenarios. These findings highlight the effectiveness of combining active RIS technology with a strategic game-theoretic framework for anti-jamming communications.
MSDNet: Efficient 4D Radar Super-Resolution via Multi-Stage Distillation
Sep 16, 2025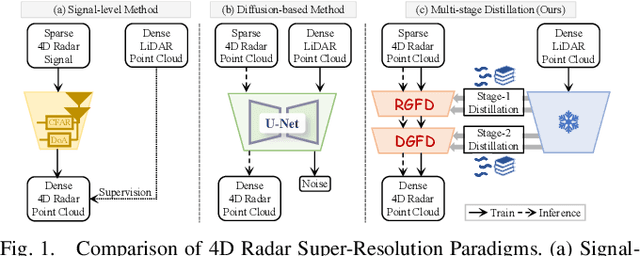
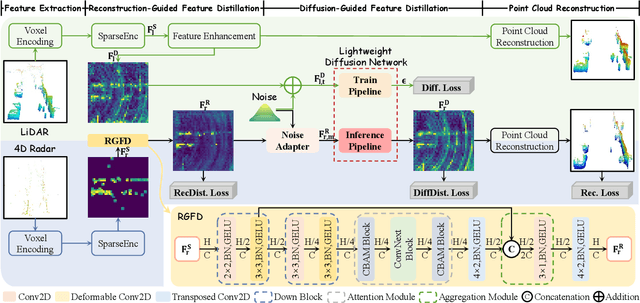
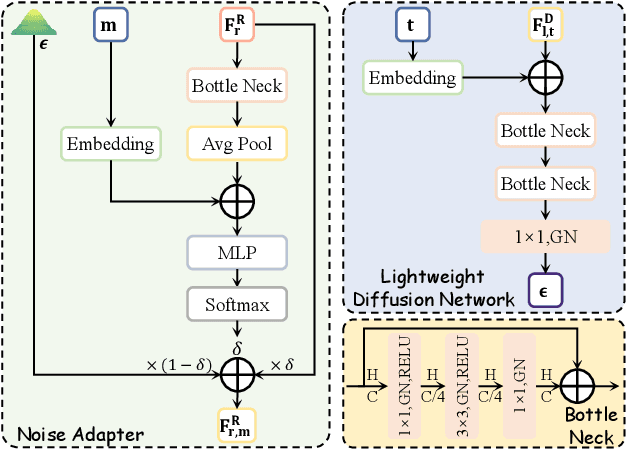
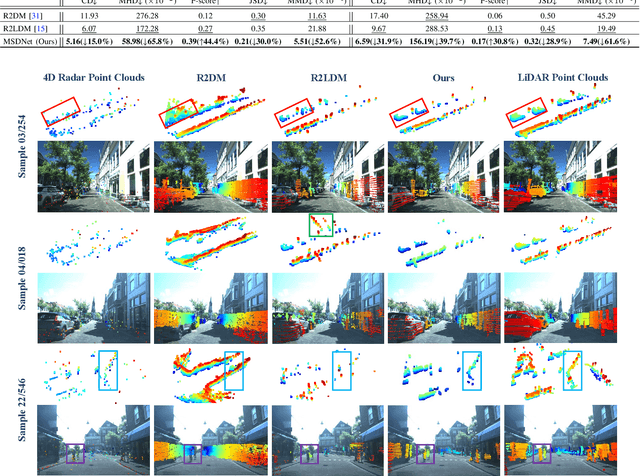
4D radar super-resolution, which aims to reconstruct sparse and noisy point clouds into dense and geometrically consistent representations, is a foundational problem in autonomous perception. However, existing methods often suffer from high training cost or rely on complex diffusion-based sampling, resulting in high inference latency and poor generalization, making it difficult to balance accuracy and efficiency. To address these limitations, we propose MSDNet, a multi-stage distillation framework that efficiently transfers dense LiDAR priors to 4D radar features to achieve both high reconstruction quality and computational efficiency. The first stage performs reconstruction-guided feature distillation, aligning and densifying the student's features through feature reconstruction. In the second stage, we propose diffusion-guided feature distillation, which treats the stage-one distilled features as a noisy version of the teacher's representations and refines them via a lightweight diffusion network. Furthermore, we introduce a noise adapter that adaptively aligns the noise level of the feature with a predefined diffusion timestep, enabling a more precise denoising. Extensive experiments on the VoD and in-house datasets demonstrate that MSDNet achieves both high-fidelity reconstruction and low-latency inference in the task of 4D radar point cloud super-resolution, and consistently improves performance on downstream tasks. The code will be publicly available upon publication.
4DRadar-GS: Self-Supervised Dynamic Driving Scene Reconstruction with 4D Radar
Sep 16, 20253D reconstruction and novel view synthesis are critical for validating autonomous driving systems and training advanced perception models. Recent self-supervised methods have gained significant attention due to their cost-effectiveness and enhanced generalization in scenarios where annotated bounding boxes are unavailable. However, existing approaches, which often rely on frequency-domain decoupling or optical flow, struggle to accurately reconstruct dynamic objects due to imprecise motion estimation and weak temporal consistency, resulting in incomplete or distorted representations of dynamic scene elements. To address these challenges, we propose 4DRadar-GS, a 4D Radar-augmented self-supervised 3D reconstruction framework tailored for dynamic driving scenes. Specifically, we first present a 4D Radar-assisted Gaussian initialization scheme that leverages 4D Radar's velocity and spatial information to segment dynamic objects and recover monocular depth scale, generating accurate Gaussian point representations. In addition, we propose a Velocity-guided PointTrack (VGPT) model, which is jointly trained with the reconstruction pipeline under scene flow supervision, to track fine-grained dynamic trajectories and construct temporally consistent representations. Evaluated on the OmniHD-Scenes dataset, 4DRadar-GS achieves state-of-the-art performance in dynamic driving scene 3D reconstruction.
Hybrid Mesh-Gaussian Representation for Efficient Indoor Scene Reconstruction
Jun 08, 20253D Gaussian splatting (3DGS) has demonstrated exceptional performance in image-based 3D reconstruction and real-time rendering. However, regions with complex textures require numerous Gaussians to capture significant color variations accurately, leading to inefficiencies in rendering speed. To address this challenge, we introduce a hybrid representation for indoor scenes that combines 3DGS with textured meshes. Our approach uses textured meshes to handle texture-rich flat areas, while retaining Gaussians to model intricate geometries. The proposed method begins by pruning and refining the extracted mesh to eliminate geometrically complex regions. We then employ a joint optimization for 3DGS and mesh, incorporating a warm-up strategy and transmittance-aware supervision to balance their contributions seamlessly.Extensive experiments demonstrate that the hybrid representation maintains comparable rendering quality and achieves superior frames per second FPS with fewer Gaussian primitives.
Zero-P-to-3: Zero-Shot Partial-View Images to 3D Object
May 29, 2025



Generative 3D reconstruction shows strong potential in incomplete observations. While sparse-view and single-image reconstruction are well-researched, partial observation remains underexplored. In this context, dense views are accessible only from a specific angular range, with other perspectives remaining inaccessible. This task presents two main challenges: (i) limited View Range: observations confined to a narrow angular scope prevent effective traditional interpolation techniques that require evenly distributed perspectives. (ii) inconsistent Generation: views created for invisible regions often lack coherence with both visible regions and each other, compromising reconstruction consistency. To address these challenges, we propose \method, a novel training-free approach that integrates the local dense observations and multi-source priors for reconstruction. Our method introduces a fusion-based strategy to effectively align these priors in DDIM sampling, thereby generating multi-view consistent images to supervise invisible views. We further design an iterative refinement strategy, which uses the geometric structures of the object to enhance reconstruction quality. Extensive experiments on multiple datasets show the superiority of our method over SOTAs, especially in invisible regions.
Unfolded Deep Graph Learning for Networked Over-the-Air Computation
May 16, 2025Over-the-air computation (AirComp) has emerged as a promising technology that enables simultaneous transmission and computation through wireless channels. In this paper, we investigate the networked AirComp in multiple clusters allowing diversified data computation, which is yet challenged by the transceiver coordination and interference management therein. Particularly, we aim to maximize the multi-cluster weighted-sum AirComp rate, where the transmission scalar as well as receive beamforming are jointly investigated while addressing the interference issue. From an optimization perspective, we decompose the formulated problem and adopt the alternating optimization technique with an iterative process to approximate the solution. Then, we reinterpret the iterations through the principle of algorithm unfolding, where the channel condition and mutual interference in the AirComp network constitute an underlying graph. Accordingly, the proposed unfolding architecture learns the weights parameterized by graph neural networks, which is trained through stochastic gradient descent approach. Simulation results show that our proposals outperform the conventional schemes, and the proposed unfolded graph learning substantially alleviates the interference and achieves superior computation performance, with strong and efficient adaptation to the dynamic and scalable networks.