 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOVD: On-policy Verbal Distillation
Jan 29, 2026Knowledge distillation offers a promising path to transfer reasoning capabilities from large teacher models to efficient student models; however, existing token-level on-policy distillation methods require token-level alignment between the student and teacher models, which restricts the student model's exploration ability, prevent effective use of interactive environment feedback, and suffer from severe memory bottlenecks in reinforcement learning. We introduce On-policy Verbal Distillation (OVD), a memory-efficient framework that replaces token-level probability matching with trajectory matching using discrete verbal scores (0--9) from teacher models. OVD dramatically reduces memory consumption while enabling on-policy distillation from teacher models with verbal feedback, and avoids token-level alignment, allowing the student model to freely explore the output space. Extensive experiments on Web question answering and mathematical reasoning tasks show that OVD substantially outperforms existing methods, delivering up to +12.9% absolute improvement in average EM on Web Q&A tasks and a up to +25.7% gain on math benchmarks (when trained with only one random samples), while also exhibiting superior training efficiency. Our project page is available at https://OVD.github.io
Hybrid Mesh-Gaussian Representation for Efficient Indoor Scene Reconstruction
Jun 08, 20253D Gaussian splatting (3DGS) has demonstrated exceptional performance in image-based 3D reconstruction and real-time rendering. However, regions with complex textures require numerous Gaussians to capture significant color variations accurately, leading to inefficiencies in rendering speed. To address this challenge, we introduce a hybrid representation for indoor scenes that combines 3DGS with textured meshes. Our approach uses textured meshes to handle texture-rich flat areas, while retaining Gaussians to model intricate geometries. The proposed method begins by pruning and refining the extracted mesh to eliminate geometrically complex regions. We then employ a joint optimization for 3DGS and mesh, incorporating a warm-up strategy and transmittance-aware supervision to balance their contributions seamlessly.Extensive experiments demonstrate that the hybrid representation maintains comparable rendering quality and achieves superior frames per second FPS with fewer Gaussian primitives.
PhyX: Does Your Model Have the "Wits" for Physical Reasoning?
May 21, 2025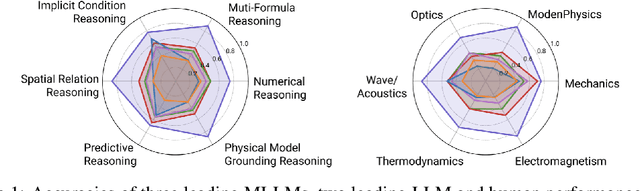
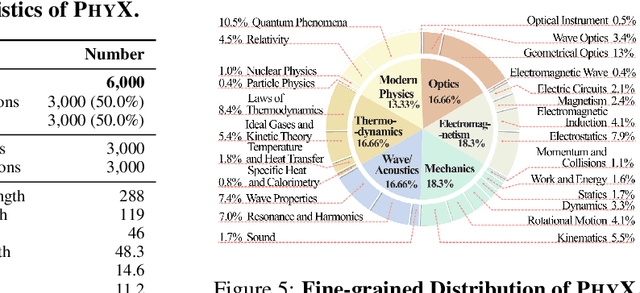
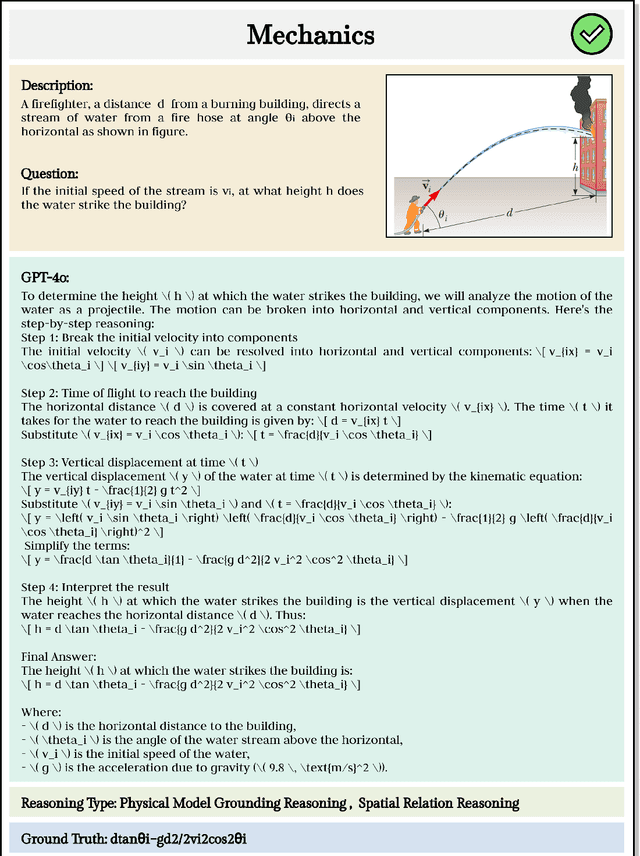
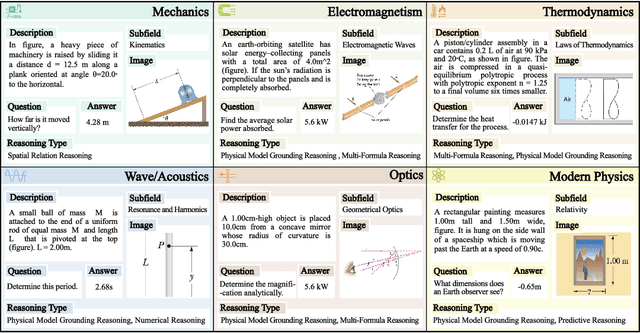
Existing benchmarks fail to capture a crucial aspect of intelligence: physical reasoning, the integrated ability to combine domain knowledge, symbolic reasoning, and understanding of real-world constraints. To address this gap, we introduce PhyX: the first large-scale benchmark designed to assess models capacity for physics-grounded reasoning in visual scenarios. PhyX includes 3K meticulously curated multimodal questions spanning 6 reasoning types across 25 sub-domains and 6 core physics domains: thermodynamics, electromagnetism, mechanics, modern physics, optics, and wave\&acoustics. In our comprehensive evaluation, even state-of-the-art models struggle significantly with physical reasoning. GPT-4o, Claude3.7-Sonnet, and GPT-o4-mini achieve only 32.5\%, 42.2\%, and 45.8\% accuracy respectively-performance gaps exceeding 29\% compared to human experts. Our analysis exposes critical limitations in current models: over-reliance on memorized disciplinary knowledge, excessive dependence on mathematical formulations, and surface-level visual pattern matching rather than genuine physical understanding. We provide in-depth analysis through fine-grained statistics, detailed case studies, and multiple evaluation paradigms to thoroughly examine physical reasoning capabilities. To ensure reproducibility, we implement a compatible evaluation protocol based on widely-used toolkits such as VLMEvalKit, enabling one-click evaluation.
HaLoRA: Hardware-aware Low-Rank Adaptation for Large Language Models Based on Hybrid Compute-in-Memory Architecture
Feb 27, 2025
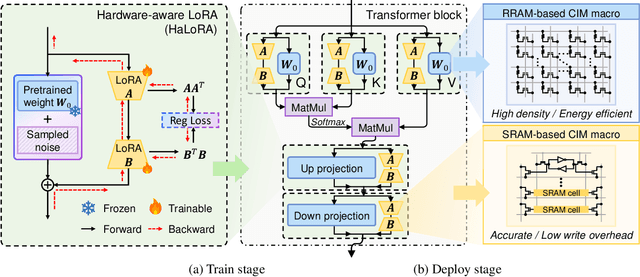
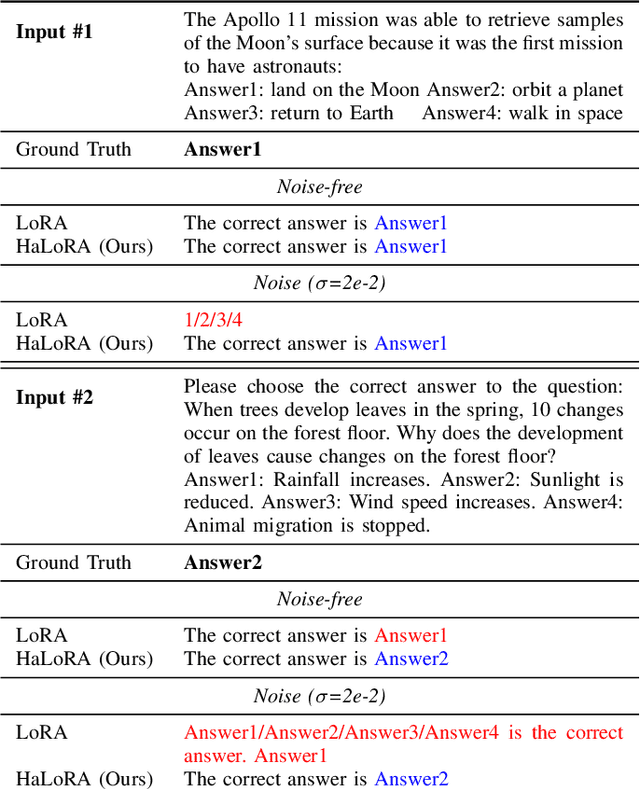
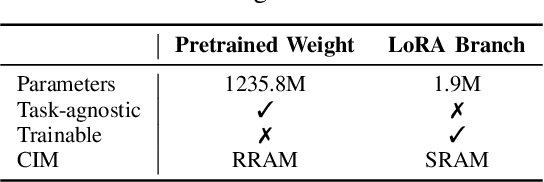
Low-rank adaptation (LoRA) is a predominant parameter-efficient finetuning method to adapt large language models (LLMs) for downstream tasks. In this paper, we first propose to deploy the LoRA-finetuned LLMs on the hybrid compute-in-memory (CIM) architecture (i.e., pretrained weights onto RRAM and LoRA onto SRAM). To address performance degradation from RRAM's inherent noise, we design a novel Hardware-aware Low-rank Adaption (HaLoRA) method, aiming to train a LoRA branch that is both robust and accurate by aligning the training objectives under both ideal and noisy conditions. Experiments finetuning LLaMA 3.2 1B and 3B demonstrate HaLoRA's effectiveness across multiple reasoning tasks, achieving up to 22.7 improvement in average score while maintaining robustness at various noise levels.
Instance by Instance: An Iterative Framework for Multi-instance 3D Registration
Feb 06, 2024



Multi-instance registration is a challenging problem in computer vision and robotics, where multiple instances of an object need to be registered in a standard coordinate system. In this work, we propose the first iterative framework called instance-by-instance (IBI) for multi-instance 3D registration (MI-3DReg). It successively registers all instances in a given scenario, starting from the easiest and progressing to more challenging ones. Throughout the iterative process, outliers are eliminated continuously, leading to an increasing inlier rate for the remaining and more challenging instances. Under the IBI framework, we further propose a sparse-to-dense-correspondence-based multi-instance registration method (IBI-S2DC) to achieve robust MI-3DReg. Experiments on the synthetic and real datasets have demonstrated the effectiveness of IBI and suggested the new state-of-the-art performance of IBI-S2DC, e.g., our MHF1 is 12.02%/12.35% higher than the existing state-of-the-art method ECC on the synthetic/real datasets.