 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHybrid Mesh-Gaussian Representation for Efficient Indoor Scene Reconstruction
Jun 08, 20253D Gaussian splatting (3DGS) has demonstrated exceptional performance in image-based 3D reconstruction and real-time rendering. However, regions with complex textures require numerous Gaussians to capture significant color variations accurately, leading to inefficiencies in rendering speed. To address this challenge, we introduce a hybrid representation for indoor scenes that combines 3DGS with textured meshes. Our approach uses textured meshes to handle texture-rich flat areas, while retaining Gaussians to model intricate geometries. The proposed method begins by pruning and refining the extracted mesh to eliminate geometrically complex regions. We then employ a joint optimization for 3DGS and mesh, incorporating a warm-up strategy and transmittance-aware supervision to balance their contributions seamlessly.Extensive experiments demonstrate that the hybrid representation maintains comparable rendering quality and achieves superior frames per second FPS with fewer Gaussian primitives.
Zero-P-to-3: Zero-Shot Partial-View Images to 3D Object
May 29, 2025



Generative 3D reconstruction shows strong potential in incomplete observations. While sparse-view and single-image reconstruction are well-researched, partial observation remains underexplored. In this context, dense views are accessible only from a specific angular range, with other perspectives remaining inaccessible. This task presents two main challenges: (i) limited View Range: observations confined to a narrow angular scope prevent effective traditional interpolation techniques that require evenly distributed perspectives. (ii) inconsistent Generation: views created for invisible regions often lack coherence with both visible regions and each other, compromising reconstruction consistency. To address these challenges, we propose \method, a novel training-free approach that integrates the local dense observations and multi-source priors for reconstruction. Our method introduces a fusion-based strategy to effectively align these priors in DDIM sampling, thereby generating multi-view consistent images to supervise invisible views. We further design an iterative refinement strategy, which uses the geometric structures of the object to enhance reconstruction quality. Extensive experiments on multiple datasets show the superiority of our method over SOTAs, especially in invisible regions.
Direction-Aware Hybrid Representation Learning for 3D Hand Pose and Shape Estimation
Apr 03, 2025



Most model-based 3D hand pose and shape estimation methods directly regress the parametric model parameters from an image to obtain 3D joints under weak supervision. However, these methods involve solving a complex optimization problem with many local minima, making training difficult. To address this challenge, we propose learning direction-aware hybrid features (DaHyF) that fuse implicit image features and explicit 2D joint coordinate features. This fusion is enhanced by the pixel direction information in the camera coordinate system to estimate pose, shape, and camera viewpoint. Our method directly predicts 3D hand poses with DaHyF representation and reduces jittering during motion capture using prediction confidence based on contrastive learning. We evaluate our method on the FreiHAND dataset and show that it outperforms existing state-of-the-art methods by more than 33% in accuracy. DaHyF also achieves the top ranking on both the HO3Dv2 and HO3Dv3 leaderboards for the metric of Mean Joint Error (after scale and translation alignment). Compared to the second-best results, the largest improvement observed is 10%. We also demonstrate its effectiveness in real-time motion capture scenarios with hand position variability, occlusion, and motion blur.
OccluGaussian: Occlusion-Aware Gaussian Splatting for Large Scene Reconstruction and Rendering
Mar 20, 2025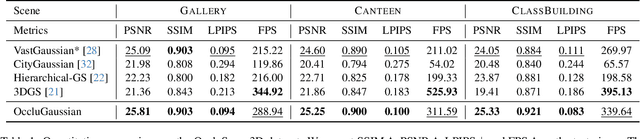
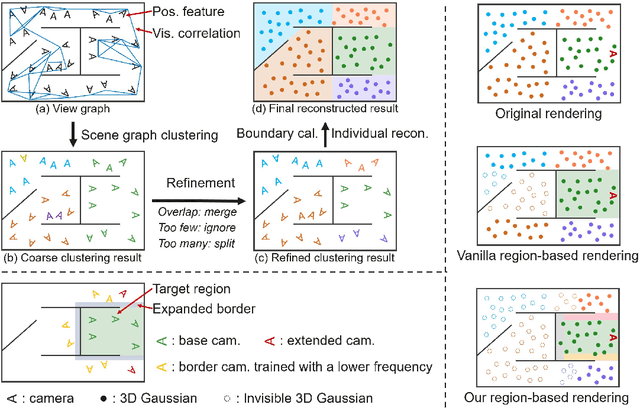
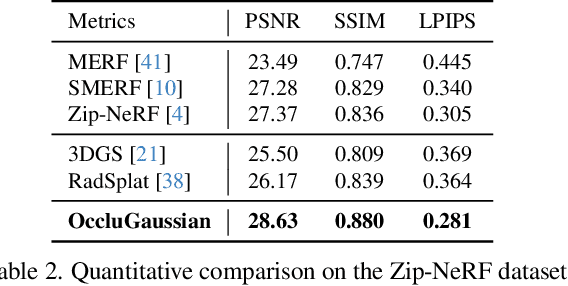
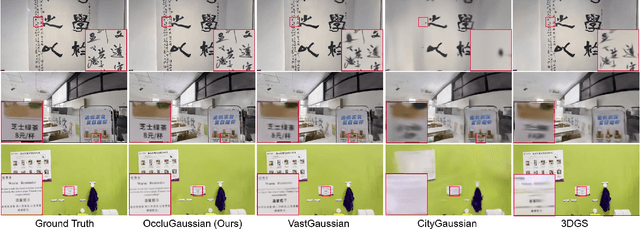
In large-scale scene reconstruction using 3D Gaussian splatting, it is common to partition the scene into multiple smaller regions and reconstruct them individually. However, existing division methods are occlusion-agnostic, meaning that each region may contain areas with severe occlusions. As a result, the cameras within those regions are less correlated, leading to a low average contribution to the overall reconstruction. In this paper, we propose an occlusion-aware scene division strategy that clusters training cameras based on their positions and co-visibilities to acquire multiple regions. Cameras in such regions exhibit stronger correlations and a higher average contribution, facilitating high-quality scene reconstruction. We further propose a region-based rendering technique to accelerate large scene rendering, which culls Gaussians invisible to the region where the viewpoint is located. Such a technique significantly speeds up the rendering without compromising quality. Extensive experiments on multiple large scenes show that our method achieves superior reconstruction results with faster rendering speed compared to existing state-of-the-art approaches. Project page: https://occlugaussian.github.io.
Decoupling Appearance Variations with 3D Consistent Features in Gaussian Splatting
Jan 18, 2025



Gaussian Splatting has emerged as a prominent 3D representation in novel view synthesis, but it still suffers from appearance variations, which are caused by various factors, such as modern camera ISPs, different time of day, weather conditions, and local light changes. These variations can lead to floaters and color distortions in the rendered images/videos. Recent appearance modeling approaches in Gaussian Splatting are either tightly coupled with the rendering process, hindering real-time rendering, or they only account for mild global variations, performing poorly in scenes with local light changes. In this paper, we propose DAVIGS, a method that decouples appearance variations in a plug-and-play and efficient manner. By transforming the rendering results at the image level instead of the Gaussian level, our approach can model appearance variations with minimal optimization time and memory overhead. Furthermore, our method gathers appearance-related information in 3D space to transform the rendered images, thus building 3D consistency across views implicitly. We validate our method on several appearance-variant scenes, and demonstrate that it achieves state-of-the-art rendering quality with minimal training time and memory usage, without compromising rendering speeds. Additionally, it provides performance improvements for different Gaussian Splatting baselines in a plug-and-play manner.
MirrorGaussian: Reflecting 3D Gaussians for Reconstructing Mirror Reflections
May 20, 2024



3D Gaussian Splatting showcases notable advancements in photo-realistic and real-time novel view synthesis. However, it faces challenges in modeling mirror reflections, which exhibit substantial appearance variations from different viewpoints. To tackle this problem, we present MirrorGaussian, the first method for mirror scene reconstruction with real-time rendering based on 3D Gaussian Splatting. The key insight is grounded on the mirror symmetry between the real-world space and the virtual mirror space. We introduce an intuitive dual-rendering strategy that enables differentiable rasterization of both the real-world 3D Gaussians and the mirrored counterpart obtained by reflecting the former about the mirror plane. All 3D Gaussians are jointly optimized with the mirror plane in an end-to-end framework. MirrorGaussian achieves high-quality and real-time rendering in scenes with mirrors, empowering scene editing like adding new mirrors and objects. Comprehensive experiments on multiple datasets demonstrate that our approach significantly outperforms existing methods, achieving state-of-the-art results. Project page: https://mirror-gaussian.github.io/.
VastGaussian: Vast 3D Gaussians for Large Scene Reconstruction
Feb 27, 2024



Existing NeRF-based methods for large scene reconstruction often have limitations in visual quality and rendering speed. While the recent 3D Gaussian Splatting works well on small-scale and object-centric scenes, scaling it up to large scenes poses challenges due to limited video memory, long optimization time, and noticeable appearance variations. To address these challenges, we present VastGaussian, the first method for high-quality reconstruction and real-time rendering on large scenes based on 3D Gaussian Splatting. We propose a progressive partitioning strategy to divide a large scene into multiple cells, where the training cameras and point cloud are properly distributed with an airspace-aware visibility criterion. These cells are merged into a complete scene after parallel optimization. We also introduce decoupled appearance modeling into the optimization process to reduce appearance variations in the rendered images. Our approach outperforms existing NeRF-based methods and achieves state-of-the-art results on multiple large scene datasets, enabling fast optimization and high-fidelity real-time rendering.
Learning Unorthogonalized Matrices for Rotation Estimation
Dec 01, 2023



Estimating 3D rotations is a common procedure for 3D computer vision. The accuracy depends heavily on the rotation representation. One form of representation -- rotation matrices -- is popular due to its continuity, especially for pose estimation tasks. The learning process usually incorporates orthogonalization to ensure orthonormal matrices. Our work reveals, through gradient analysis, that common orthogonalization procedures based on the Gram-Schmidt process and singular value decomposition will slow down training efficiency. To this end, we advocate removing orthogonalization from the learning process and learning unorthogonalized `Pseudo' Rotation Matrices (PRoM). An optimization analysis shows that PRoM converges faster and to a better solution. By replacing the orthogonalization incorporated representation with our proposed PRoM in various rotation-related tasks, we achieve state-of-the-art results on large-scale benchmarks for human pose estimation.