 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCacheFlow: Fast Human Motion Prediction by Cached Normalizing Flow
May 19, 2025Many density estimation techniques for 3D human motion prediction require a significant amount of inference time, often exceeding the duration of the predicted time horizon. To address the need for faster density estimation for 3D human motion prediction, we introduce a novel flow-based method for human motion prediction called CacheFlow. Unlike previous conditional generative models that suffer from time efficiency, CacheFlow takes advantage of an unconditional flow-based generative model that transforms a Gaussian mixture into the density of future motions. The results of the computation of the flow-based generative model can be precomputed and cached. Then, for conditional prediction, we seek a mapping from historical trajectories to samples in the Gaussian mixture. This mapping can be done by a much more lightweight model, thus saving significant computation overhead compared to a typical conditional flow model. In such a two-stage fashion and by caching results from the slow flow model computation, we build our CacheFlow without loss of prediction accuracy and model expressiveness. This inference process is completed in approximately one millisecond, making it 4 times faster than previous VAE methods and 30 times faster than previous diffusion-based methods on standard benchmarks such as Human3.6M and AMASS datasets. Furthermore, our method demonstrates improved density estimation accuracy and comparable prediction accuracy to a SOTA method on Human3.6M. Our code and models will be publicly available.
Physical Plausibility-aware Trajectory Prediction via Locomotion Embodiment
Mar 21, 2025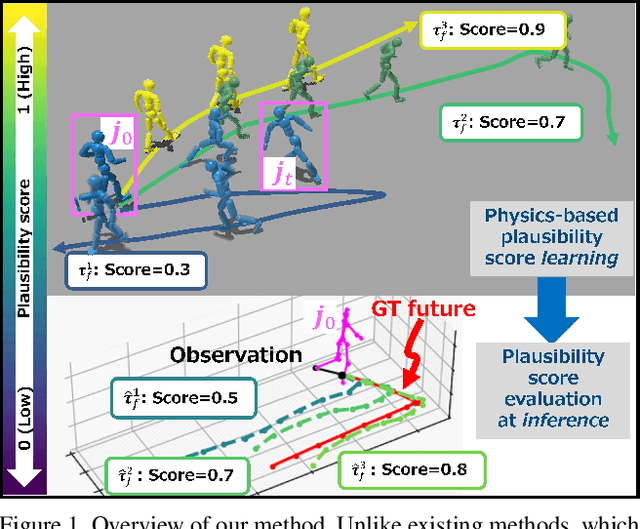
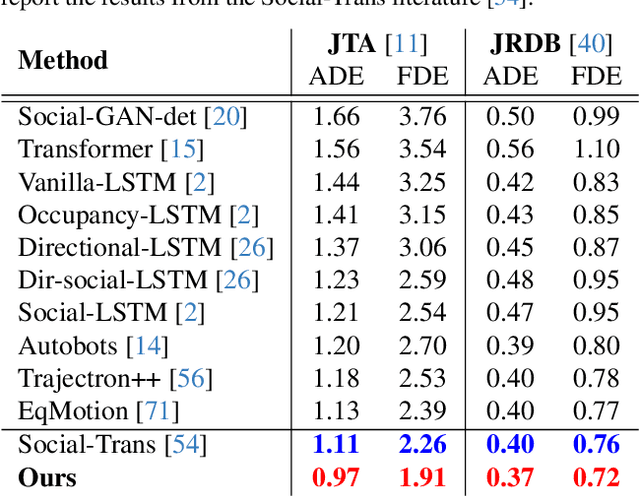
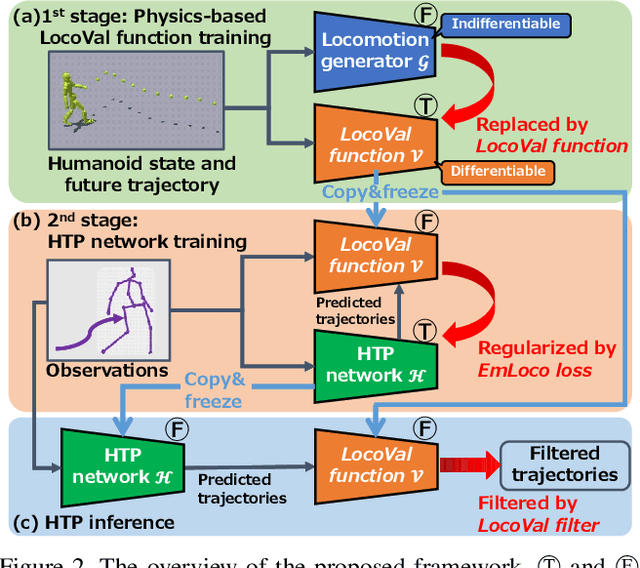

Humans can predict future human trajectories even from momentary observations by using human pose-related cues. However, previous Human Trajectory Prediction (HTP) methods leverage the pose cues implicitly, resulting in implausible predictions. To address this, we propose Locomotion Embodiment, a framework that explicitly evaluates the physical plausibility of the predicted trajectory by locomotion generation under the laws of physics. While the plausibility of locomotion is learned with an indifferentiable physics simulator, it is replaced by our differentiable Locomotion Value function to train an HTP network in a data-driven manner. In particular, our proposed Embodied Locomotion loss is beneficial for efficiently training a stochastic HTP network using multiple heads. Furthermore, the Locomotion Value filter is proposed to filter out implausible trajectories at inference. Experiments demonstrate that our method enhances even the state-of-the-art HTP methods across diverse datasets and problem settings. Our code is available at: https://github.com/ImIntheMiddle/EmLoco.
Multimodal Active Measurement for Human Mesh Recovery in Close Proximity
Oct 12, 2023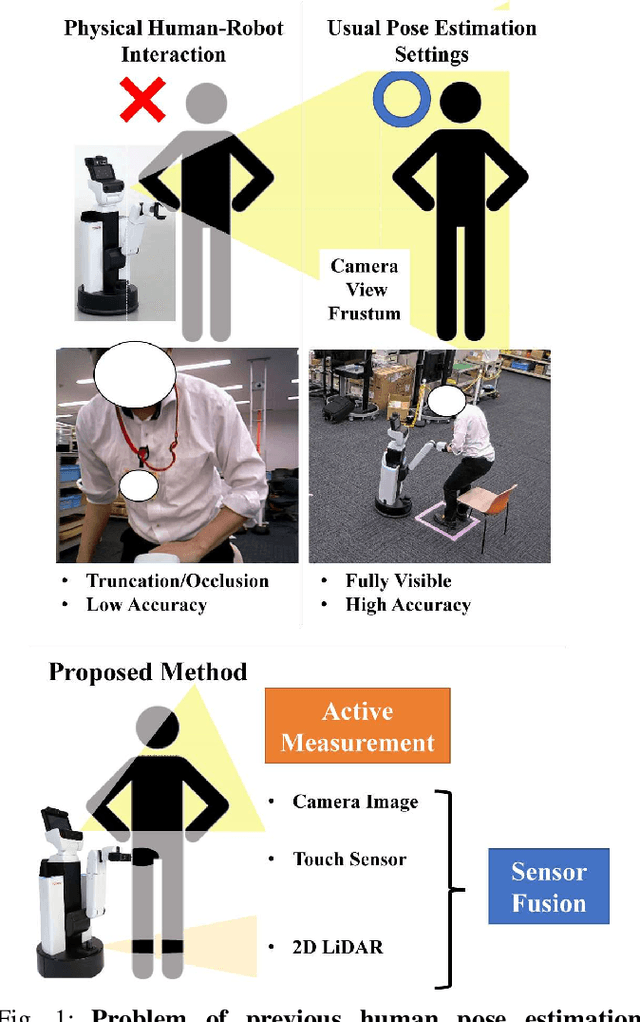
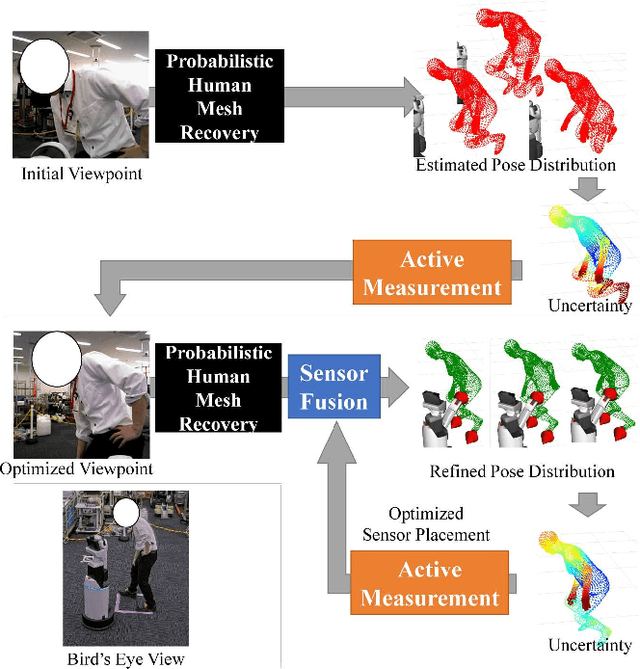
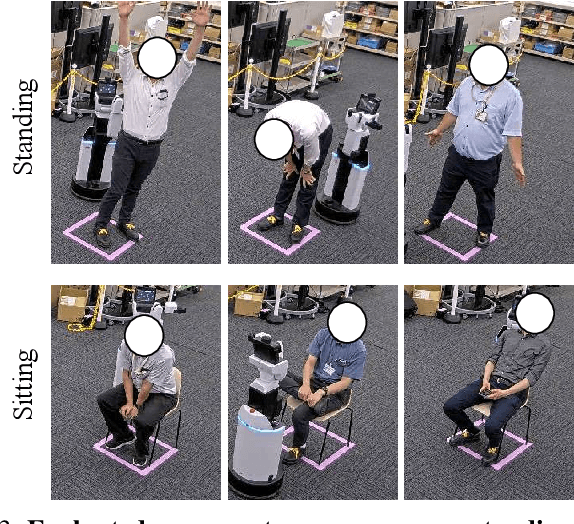
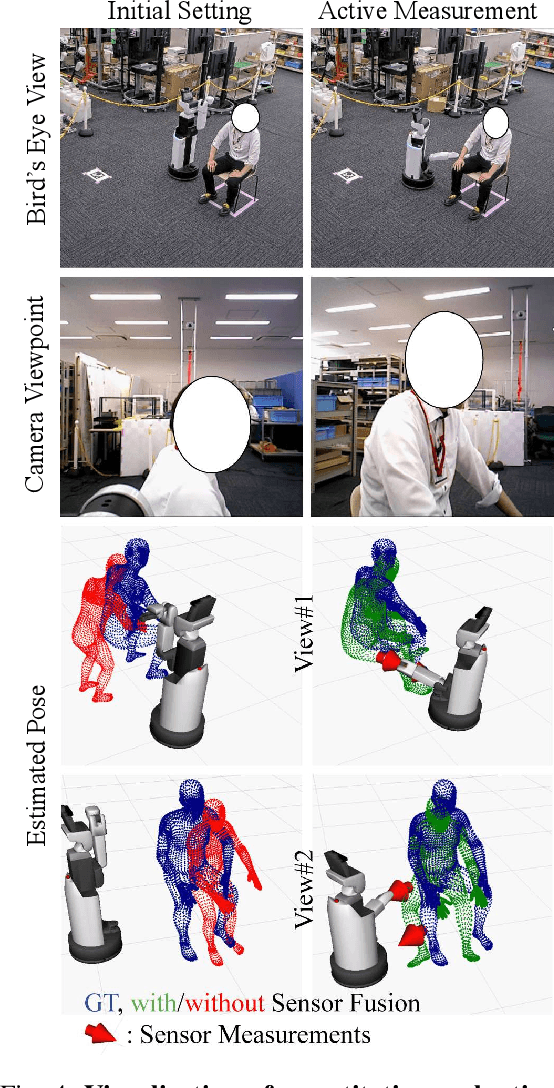
For safe and sophisticated physical human-robot interactions (pHRI), a robot needs to estimate the accurate body pose or mesh of the target person. However, in these pHRI scenarios, the robot cannot fully observe the target person's body with equipped cameras because the target person is usually close to the robot. This leads to severe truncation and occlusions, and results in poor accuracy of human pose estimation. For better accuracy of human pose estimation or mesh recovery on this limited information from cameras, we propose an active measurement and sensor fusion framework of the equipped cameras and other sensors such as touch sensors and 2D LiDAR. These touch and LiDAR sensing are obtained attendantly through pHRI without additional costs. These sensor measurements are sparse but reliable and informative cues for human mesh recovery. In our active measurement process, camera viewpoints and sensor placements are optimized based on the uncertainty of the estimated pose, which is closely related to the truncated or occluded areas. In our sensor fusion process, we fuse the sensor measurements to the camera-based estimated pose by minimizing the distance between the estimated mesh and measured positions. Our method is agnostic to robot configurations. Experiments were conducted using the Toyota Human Support Robot, which has a camera, 2D LiDAR, and a touch sensor on the robot arm. Our proposed method demonstrated the superiority in the human pose estimation accuracy on the quantitative comparison. Furthermore, our proposed method reliably estimated the pose of the target person in practical settings such as target people occluded by a blanket and standing aid with the robot arm.
Fast Inference and Update of Probabilistic Density Estimation on Trajectory Prediction
Aug 17, 2023Safety-critical applications such as autonomous vehicles and social robots require fast computation and accurate probability density estimation on trajectory prediction. To address both requirements, this paper presents a new normalizing flow-based trajectory prediction model named FlowChain. FlowChain is a stack of conditional continuously-indexed flows (CIFs) that are expressive and allow analytical probability density computation. This analytical computation is faster than the generative models that need additional approximations such as kernel density estimation. Moreover, FlowChain is more accurate than the Gaussian mixture-based models due to fewer assumptions on the estimated density. FlowChain also allows a rapid update of estimated probability densities. This update is achieved by adopting the \textit{newest observed position} and reusing the flow transformations and its log-det-jacobians that represent the \textit{motion trend}. This update is completed in less than one millisecond because this reuse greatly omits the computational cost. Experimental results showed our FlowChain achieved state-of-the-art trajectory prediction accuracy compared to previous methods. Furthermore, our FlowChain demonstrated superiority in the accuracy and speed of density estimation. Our code is available at \url{https://github.com/meaten/FlowChain-ICCV2023}
Kernelized Back-Projection Networks for Blind Super Resolution
Feb 17, 2023



Since non-blind Super Resolution (SR) fails to super-resolve Low-Resolution (LR) images degraded by arbitrary degradations, SR with the degradation model is required. However, this paper reveals that non-blind SR that is trained simply with various blur kernels exhibits comparable performance as those with the degradation model for blind SR. This result motivates us to revisit high-performance non-blind SR and extend it to blind SR with blur kernels. This paper proposes two SR networks by integrating kernel estimation and SR branches in an iterative end-to-end manner. In the first model, which is called the Kernel Conditioned Back-Projection Network (KCBPN), the low-dimensional kernel representations are estimated for conditioning the SR branch. In our second model, the Kernelized BackProjection Network (KBPN), a raw kernel is estimated and directly employed for modeling the image degradation. The estimated kernel is employed not only for back-propagating its residual but also for forward-propagating the residual to iterative stages. This forward-propagation encourages these stages to learn a variety of different features in different stages by focusing on pixels with large residuals in each stage. Experimental results validate the effectiveness of our proposed networks for kernel estimation and SR. We will release the code for this work.
MotionAug: Augmentation with Physical Correction for Human Motion Prediction
Mar 29, 2022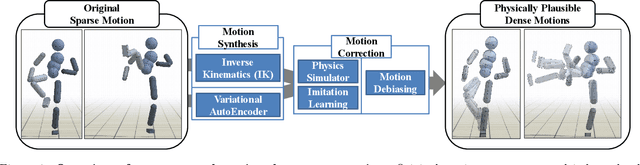
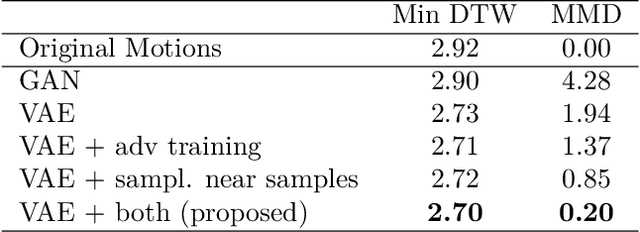
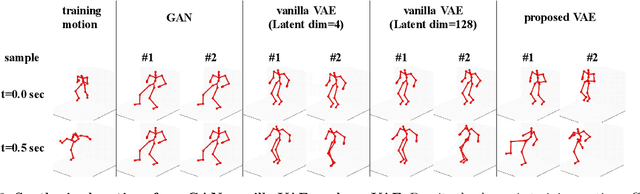
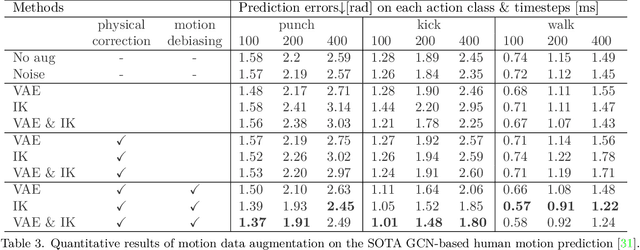
This paper presents a motion data augmentation scheme incorporating motion synthesis encouraging diversity and motion correction imposing physical plausibility. This motion synthesis consists of our modified Variational AutoEncoder (VAE) and Inverse Kinematics (IK). In this VAE, our proposed sampling-near-samples method generates various valid motions even with insufficient training motion data. Our IK-based motion synthesis method allows us to generate a variety of motions semi-automatically. Since these two schemes generate unrealistic artifacts in the synthesized motions, our motion correction rectifies them. This motion correction scheme consists of imitation learning with physics simulation and subsequent motion debiasing. For this imitation learning, we propose the PD-residual force that significantly accelerates the training process. Furthermore, our motion debiasing successfully offsets the motion bias induced by imitation learning to maximize the effect of augmentation. As a result, our method outperforms previous noise-based motion augmentation methods by a large margin on both Recurrent Neural Network-based and Graph Convolutional Network-based human motion prediction models. The code is available at https://github.com/meaten/MotionAug.
A Robot Cluster for Reproducible Research in Dexterous Manipulation
Sep 22, 2021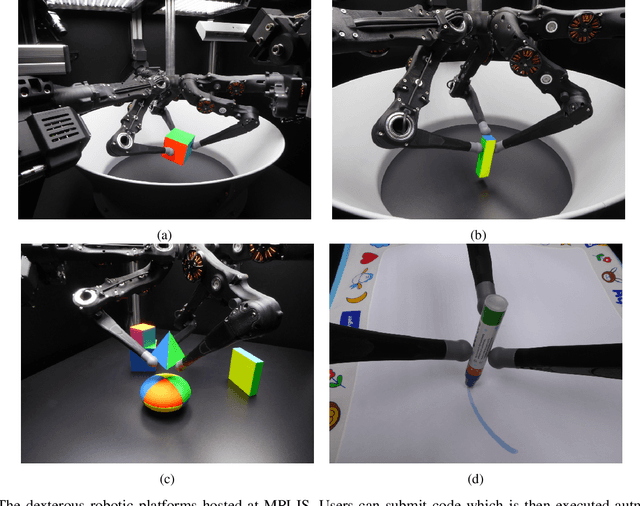
Dexterous manipulation remains an open problem in robotics. To coordinate efforts of the research community towards tackling this problem, we propose a shared benchmark. We designed and built robotic platforms that are hosted at the MPI-IS and can be accessed remotely. Each platform consists of three robotic fingers that are capable of dexterous object manipulation. Users are able to control the platforms remotely by submitting code that is executed automatically, akin to a computational cluster. Using this setup, i) we host robotics competitions, where teams from anywhere in the world access our platforms to tackle challenging tasks, ii) we publish the datasets collected during these competitions (consisting of hundreds of robot hours), and iii) we give researchers access to these platforms for their own projects.
NTIRE 2021 Challenge on Burst Super-Resolution: Methods and Results
Jun 07, 2021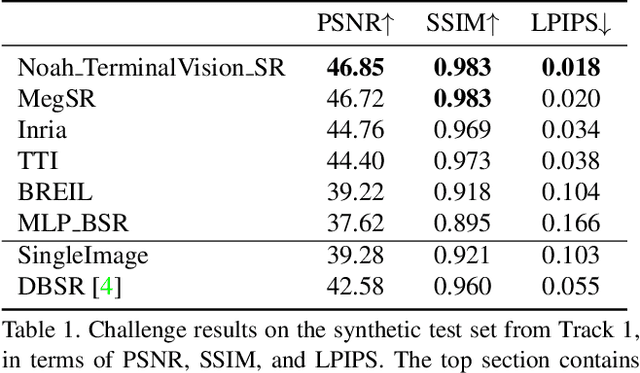
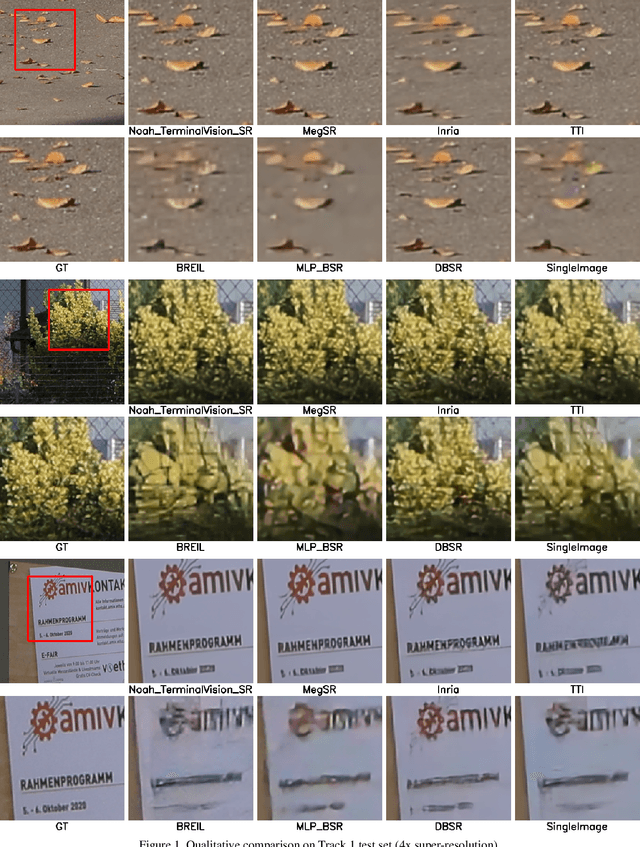
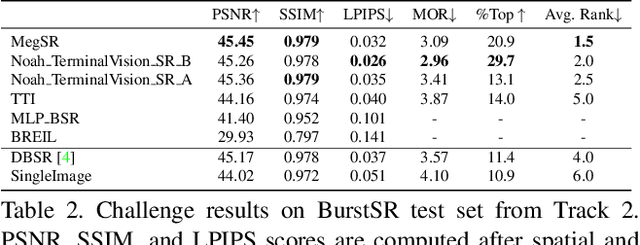

This paper reviews the NTIRE2021 challenge on burst super-resolution. Given a RAW noisy burst as input, the task in the challenge was to generate a clean RGB image with 4 times higher resolution. The challenge contained two tracks; Track 1 evaluating on synthetically generated data, and Track 2 using real-world bursts from mobile camera. In the final testing phase, 6 teams submitted results using a diverse set of solutions. The top-performing methods set a new state-of-the-art for the burst super-resolution task.
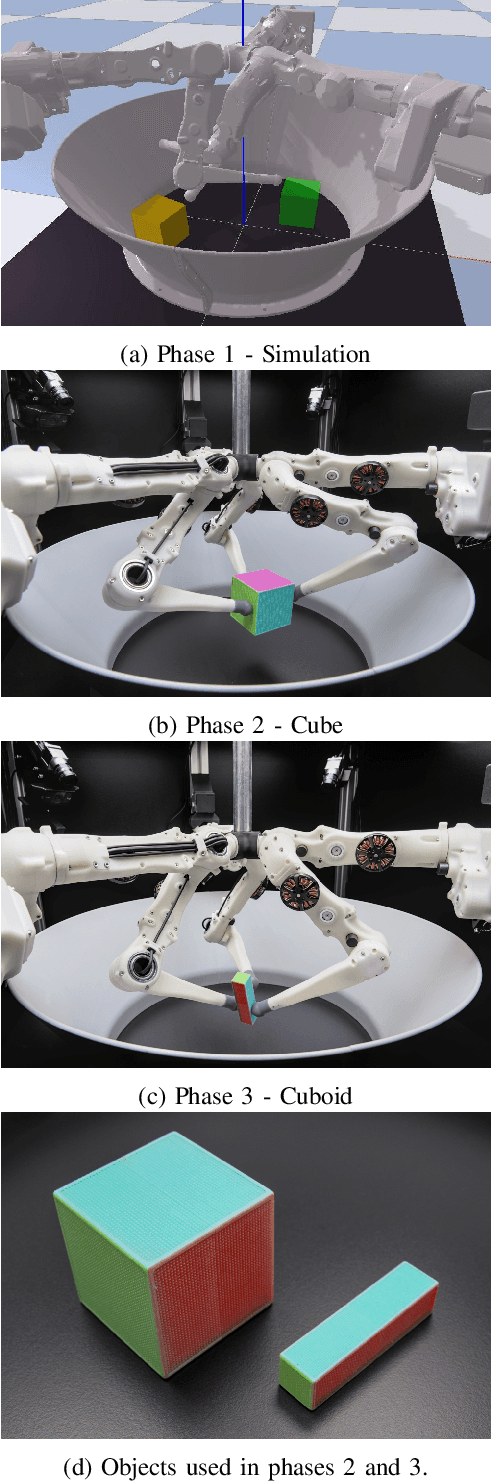
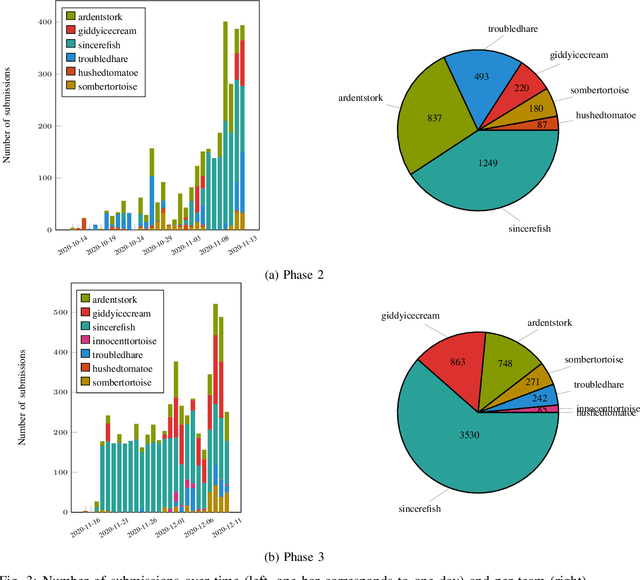
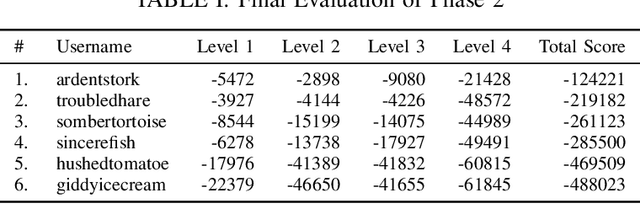
Grasp and Motion Planning for Dexterous Manipulation for the Real Robot Challenge
Jan 08, 2021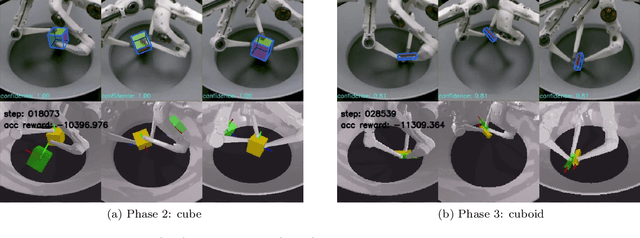
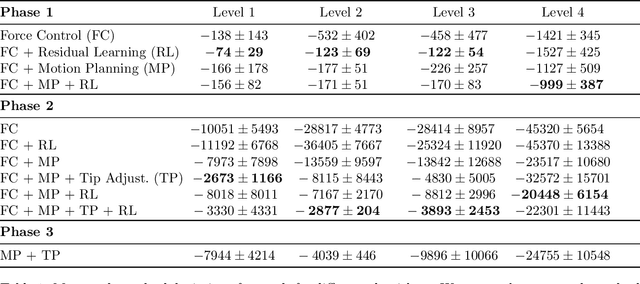
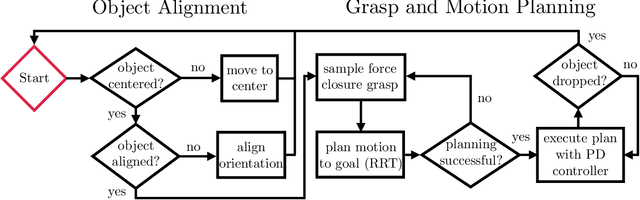
This report describes our winning submission to the Real Robot Challenge (https://real-robot-challenge.com/). The Real Robot Challenge is a three-phase dexterous manipulation competition that involves manipulating various rectangular objects with the TriFinger Platform. Our approach combines motion planning with several motion primitives to manipulate the object. For Phases 1 and 2, we additionally learn a residual policy in simulation that applies corrective actions on top of our controller. Our approach won first place in Phase 2 and Phase 3 of the competition. We were anonymously known as `ardentstork' on the competition leaderboard (https://real-robot-challenge.com/leader-board). Videos and our code can be found at https://github.com/ripl-ttic/real-robot-challenge.