 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStackGen: Generating Stable Structures from Silhouettes via Diffusion
Sep 26, 2024



Humans naturally obtain intuition about the interactions between and the stability of rigid objects by observing and interacting with the world. It is this intuition that governs the way in which we regularly configure objects in our environment, allowing us to build complex structures from simple, everyday objects. Robotic agents, on the other hand, traditionally require an explicit model of the world that includes the detailed geometry of each object and an analytical model of the environment dynamics, which are difficult to scale and preclude generalization. Instead, robots would benefit from an awareness of intuitive physics that enables them to similarly reason over the stable interaction of objects in their environment. Towards that goal, we propose StackGen, a diffusion model that generates diverse stable configurations of building blocks matching a target silhouette. To demonstrate the capability of the method, we evaluate it in a simulated environment and deploy it in the real setting using a robotic arm to assemble structures generated by the model.
Generative Modeling Perspective for Control and Reasoning in Robotics
Aug 30, 2024Heralded by the initial success in speech recognition and image classification, learning-based approaches with neural networks, commonly referred to as deep learning, have spread across various fields. A primitive form of a neural network functions as a deterministic mapping from one vector to another, parameterized by trainable weights. This is well suited for point estimation in which the model learns a one-to-one mapping (e.g., mapping a front camera view to a steering angle) that is required to solve the task of interest. Although learning such a deterministic, one-to-one mapping is effective, there are scenarios where modeling \emph{multimodal} data distributions, namely learning one-to-many relationships, is helpful or even necessary. In this thesis, we adopt a generative modeling perspective on robotics problems. Generative models learn and produce samples from multimodal distributions, rather than performing point estimation. We will explore the advantages this perspective offers for three topics in robotics.
6-DoF Stability Field via Diffusion Models
Oct 26, 2023A core capability for robot manipulation is reasoning over where and how to stably place objects in cluttered environments. Traditionally, robots have relied on object-specific, hand-crafted heuristics in order to perform such reasoning, with limited generalizability beyond a small number of object instances and object interaction patterns. Recent approaches instead learn notions of physical interaction, namely motion prediction, but require supervision in the form of labeled object information or come at the cost of high sample complexity, and do not directly reason over stability or object placement. We present 6-DoFusion, a generative model capable of generating 3D poses of an object that produces a stable configuration of a given scene. Underlying 6-DoFusion is a diffusion model that incrementally refines a randomly initialized SE(3) pose to generate a sample from a learned, context-dependent distribution over stable poses. We evaluate our model on different object placement and stacking tasks, demonstrating its ability to construct stable scenes that involve novel object classes as well as to improve the accuracy of state-of-the-art 3D pose estimation methods.
Cold Diffusion on the Replay Buffer: Learning to Plan from Known Good States
Oct 21, 2023



Learning from demonstrations (LfD) has successfully trained robots to exhibit remarkable generalization capabilities. However, many powerful imitation techniques do not prioritize the feasibility of the robot behaviors they generate. In this work, we explore the feasibility of plans produced by LfD. As in prior work, we employ a temporal diffusion model with fixed start and goal states to facilitate imitation through in-painting. Unlike previous studies, we apply cold diffusion to ensure the optimization process is directed through the agent's replay buffer of previously visited states. This routing approach increases the likelihood that the final trajectories will predominantly occupy the feasible region of the robot's state space. We test this method in simulated robotic environments with obstacles and observe a significant improvement in the agent's ability to avoid these obstacles during planning.
Blending Imitation and Reinforcement Learning for Robust Policy Improvement
Oct 04, 2023



While reinforcement learning (RL) has shown promising performance, its sample complexity continues to be a substantial hurdle, restricting its broader application across a variety of domains. Imitation learning (IL) utilizes oracles to improve sample efficiency, yet it is often constrained by the quality of the oracles deployed. which actively interleaves between IL and RL based on an online estimate of their performance. RPI draws on the strengths of IL, using oracle queries to facilitate exploration, an aspect that is notably challenging in sparse-reward RL, particularly during the early stages of learning. As learning unfolds, RPI gradually transitions to RL, effectively treating the learned policy as an improved oracle. This algorithm is capable of learning from and improving upon a diverse set of black-box oracles. Integral to RPI are Robust Active Policy Selection (RAPS) and Robust Policy Gradient (RPG), both of which reason over whether to perform state-wise imitation from the oracles or learn from its own value function when the learner's performance surpasses that of the oracles in a specific state. Empirical evaluations and theoretical analysis validate that RPI excels in comparison to existing state-of-the-art methodologies, demonstrating superior performance across various benchmark domains.
Statler: State-Maintaining Language Models for Embodied Reasoning
Jul 03, 2023



Large language models (LLMs) provide a promising tool that enable robots to perform complex robot reasoning tasks. However, the limited context window of contemporary LLMs makes reasoning over long time horizons difficult. Embodied tasks such as those that one might expect a household robot to perform typically require that the planner consider information acquired a long time ago (e.g., properties of the many objects that the robot previously encountered in the environment). Attempts to capture the world state using an LLM's implicit internal representation is complicated by the paucity of task- and environment-relevant information available in a robot's action history, while methods that rely on the ability to convey information via the prompt to the LLM are subject to its limited context window. In this paper, we propose Statler, a framework that endows LLMs with an explicit representation of the world state as a form of ``memory'' that is maintained over time. Integral to Statler is its use of two instances of general LLMs -- a world-model reader and a world-model writer -- that interface with and maintain the world state. By providing access to this world state ``memory'', Statler improves the ability of existing LLMs to reason over longer time horizons without the constraint of context length. We evaluate the effectiveness of our approach on three simulated table-top manipulation domains and a real robot domain, and show that it improves the state-of-the-art in LLM-based robot reasoning. Project website: https://statler-lm.github.io/
Active Policy Improvement from Multiple Black-box Oracles
Jun 17, 2023Reinforcement learning (RL) has made significant strides in various complex domains. However, identifying an effective policy via RL often necessitates extensive exploration. Imitation learning aims to mitigate this issue by using expert demonstrations to guide exploration. In real-world scenarios, one often has access to multiple suboptimal black-box experts, rather than a single optimal oracle. These experts do not universally outperform each other across all states, presenting a challenge in actively deciding which oracle to use and in which state. We introduce MAPS and MAPS-SE, a class of policy improvement algorithms that perform imitation learning from multiple suboptimal oracles. In particular, MAPS actively selects which of the oracles to imitate and improve their value function estimates, and MAPS-SE additionally leverages an active state exploration criterion to determine which states one should explore. We provide a comprehensive theoretical analysis and demonstrate that MAPS and MAPS-SE enjoy sample efficiency advantage over the state-of-the-art policy improvement algorithms. Empirical results show that MAPS-SE significantly accelerates policy optimization via state-wise imitation learning from multiple oracles across a broad spectrum of control tasks in the DeepMind Control Suite. Our code is publicly available at: https://github.com/ripl/maps.
To the Noise and Back: Diffusion for Shared Autonomy
Feb 24, 2023



Shared autonomy is an operational concept in which a user and an autonomous agent collaboratively control a robotic system. It provides a number of advantages over the extremes of full-teleoperation and full-autonomy in many settings. Traditional approaches to shared autonomy rely on knowledge of the environment dynamics, a discrete space of user goals that is known a priori, or knowledge of the user's policy -- assumptions that are unrealistic in many domains. Recent works relax some of these assumptions by formulating shared autonomy with model-free deep reinforcement learning (RL). In particular, they no longer need knowledge of the goal space (e.g., that the goals are discrete or constrained) or environment dynamics. However, they need knowledge of a task-specific reward function to train the policy. Unfortunately, such reward specification can be a difficult and brittle process. On top of that, the formulations inherently rely on human-in-the-loop training, and that necessitates them to prepare a policy that mimics users' behavior. In this paper, we present a new approach to shared autonomy that employs a modulation of the forward and reverse diffusion process of diffusion models. Our approach does not assume known environment dynamics or the space of user goals, and in contrast to previous work, it does not require any reward feedback, nor does it require access to the user's policy during training. Instead, our framework learns a distribution over a space of desired behaviors. It then employs a diffusion model to translate the user's actions to a sample from this distribution. Crucially, we show that it is possible to carry out this process in a manner that preserves the user's control authority. We evaluate our framework on a series of challenging continuous control tasks, and analyze its ability to effectively correct user actions while maintaining their autonomy.
Invariance Through Inference
Dec 15, 2021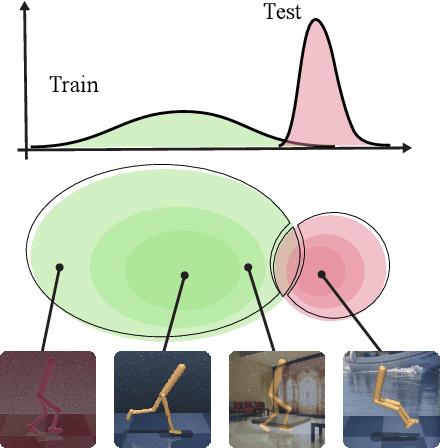
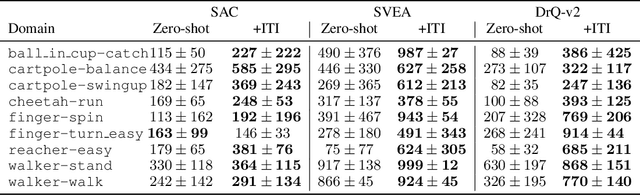
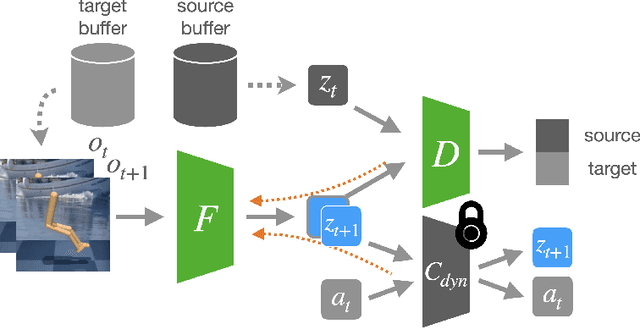
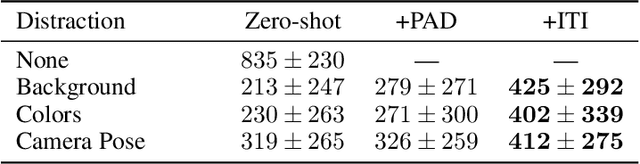
We introduce a general approach, called Invariance through Inference, for improving the test-time performance of an agent in deployment environments with unknown perceptual variations. Instead of producing invariant visual features through interpolation, invariance through inference turns adaptation at deployment-time into an unsupervised learning problem. This is achieved in practice by deploying a straightforward algorithm that tries to match the distribution of latent features to the agent's prior experience, without relying on paired data. Although simple, we show that this idea leads to surprising improvements on a variety of adaptation scenarios without access to deployment-time rewards, including changes in camera poses and lighting conditions. Results are presented on challenging distractor control suite, a robotics environment with image-based observations.
A Robot Cluster for Reproducible Research in Dexterous Manipulation
Sep 22, 2021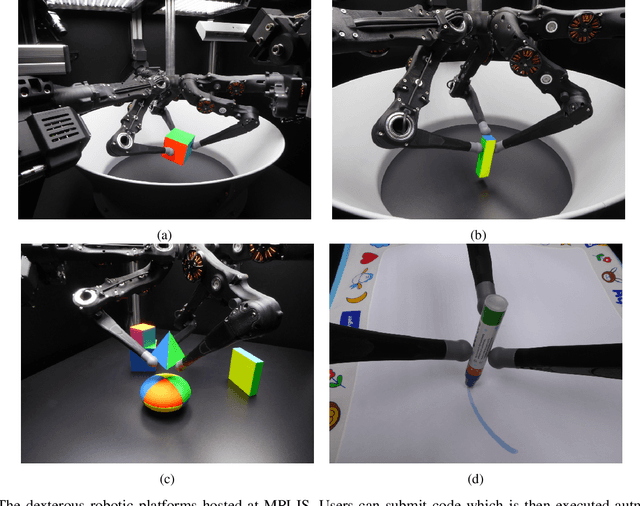
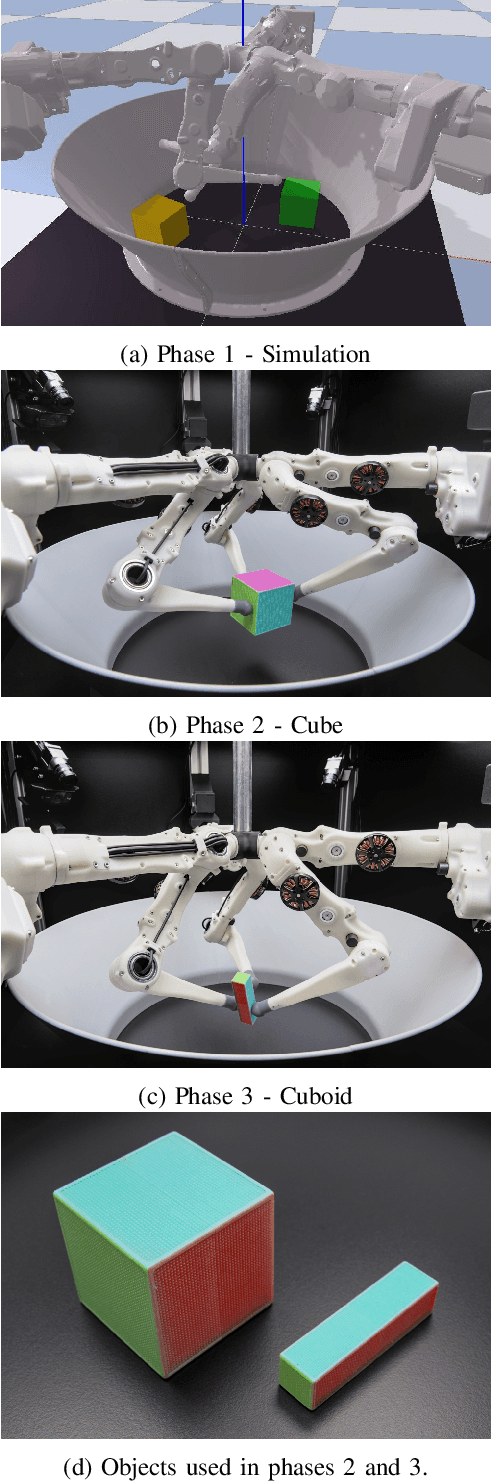
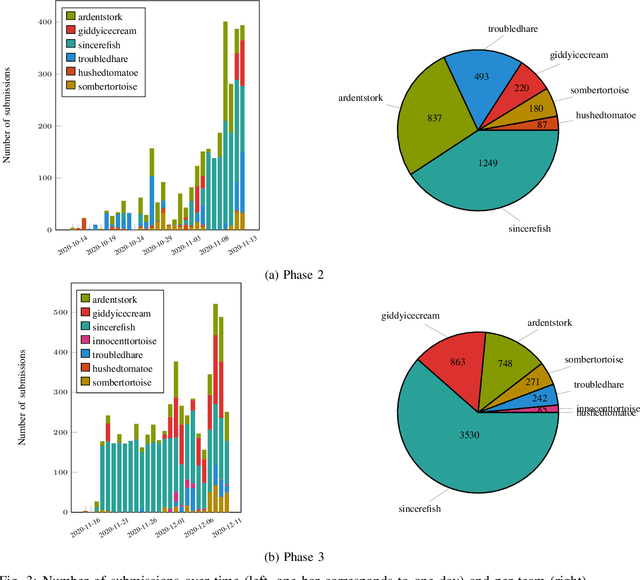
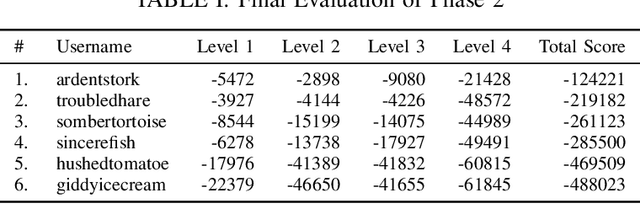
Dexterous manipulation remains an open problem in robotics. To coordinate efforts of the research community towards tackling this problem, we propose a shared benchmark. We designed and built robotic platforms that are hosted at the MPI-IS and can be accessed remotely. Each platform consists of three robotic fingers that are capable of dexterous object manipulation. Users are able to control the platforms remotely by submitting code that is executed automatically, akin to a computational cluster. Using this setup, i) we host robotics competitions, where teams from anywhere in the world access our platforms to tackle challenging tasks, ii) we publish the datasets collected during these competitions (consisting of hundreds of robot hours), and iii) we give researchers access to these platforms for their own projects.