 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvariance Through Inference
Paper and Code
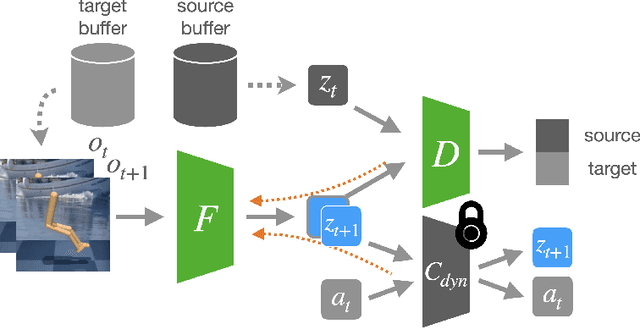
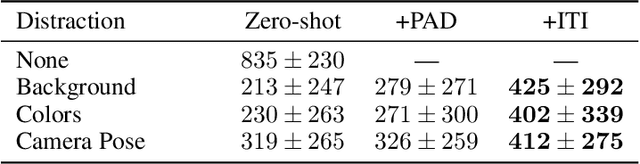
We introduce a general approach, called Invariance through Inference, for improving the test-time performance of an agent in deployment environments with unknown perceptual variations. Instead of producing invariant visual features through interpolation, invariance through inference turns adaptation at deployment-time into an unsupervised learning problem. This is achieved in practice by deploying a straightforward algorithm that tries to match the distribution of latent features to the agent's prior experience, without relying on paired data. Although simple, we show that this idea leads to surprising improvements on a variety of adaptation scenarios without access to deployment-time rewards, including changes in camera poses and lighting conditions. Results are presented on challenging distractor control suite, a robotics environment with image-based observations.