 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo You Know Where Your Camera Is? View-Invariant Policy Learning with Camera Conditioning
Oct 02, 2025We study view-invariant imitation learning by explicitly conditioning policies on camera extrinsics. Using Plucker embeddings of per-pixel rays, we show that conditioning on extrinsics significantly improves generalization across viewpoints for standard behavior cloning policies, including ACT, Diffusion Policy, and SmolVLA. To evaluate policy robustness under realistic viewpoint shifts, we introduce six manipulation tasks in RoboSuite and ManiSkill that pair "fixed" and "randomized" scene variants, decoupling background cues from camera pose. Our analysis reveals that policies without extrinsics often infer camera pose using visual cues from static backgrounds in fixed scenes; this shortcut collapses when workspace geometry or camera placement shifts. Conditioning on extrinsics restores performance and yields robust RGB-only control without depth. We release the tasks, demonstrations, and code at https://ripl.github.io/know_your_camera/ .
Transcrib3D: 3D Referring Expression Resolution through Large Language Models
Apr 30, 2024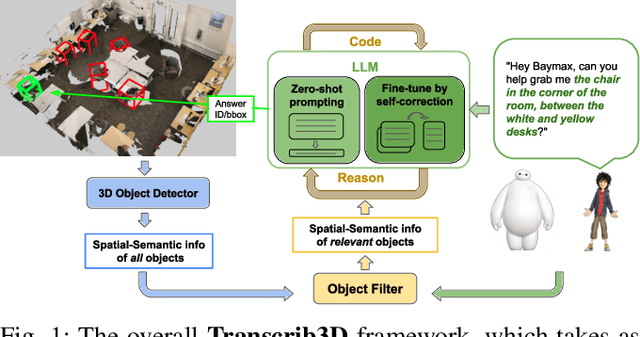
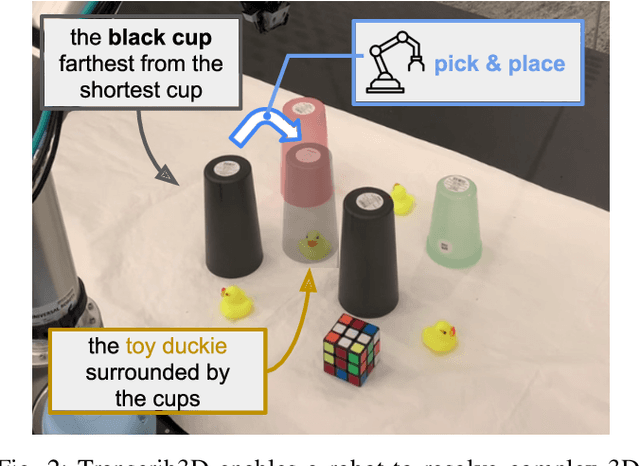
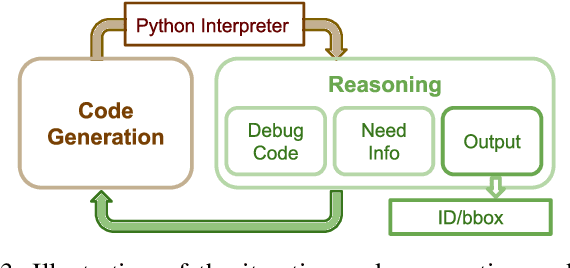
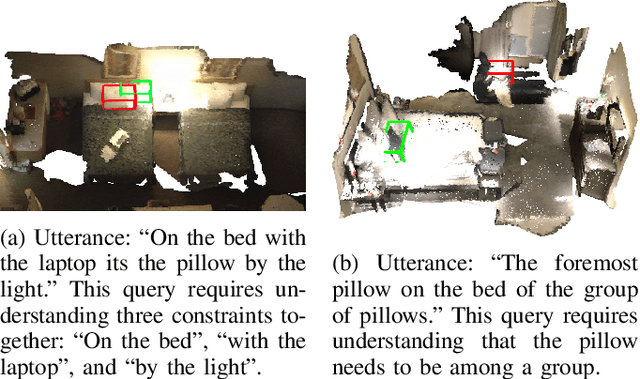
If robots are to work effectively alongside people, they must be able to interpret natural language references to objects in their 3D environment. Understanding 3D referring expressions is challenging -- it requires the ability to both parse the 3D structure of the scene and correctly ground free-form language in the presence of distraction and clutter. We introduce Transcrib3D, an approach that brings together 3D detection methods and the emergent reasoning capabilities of large language models (LLMs). Transcrib3D uses text as the unifying medium, which allows us to sidestep the need to learn shared representations connecting multi-modal inputs, which would require massive amounts of annotated 3D data. As a demonstration of its effectiveness, Transcrib3D achieves state-of-the-art results on 3D reference resolution benchmarks, with a great leap in performance from previous multi-modality baselines. To improve upon zero-shot performance and facilitate local deployment on edge computers and robots, we propose self-correction for fine-tuning that trains smaller models, resulting in performance close to that of large models. We show that our method enables a real robot to perform pick-and-place tasks given queries that contain challenging referring expressions. Project site is at https://ripl.github.io/Transcrib3D.
MANGO: A Benchmark for Evaluating Mapping and Navigation Abilities of Large Language Models
Mar 29, 2024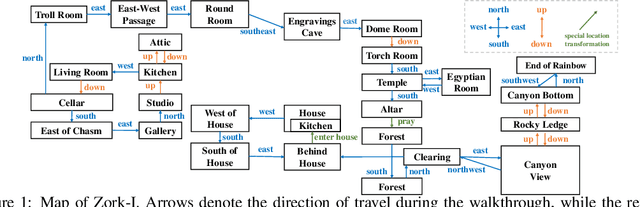
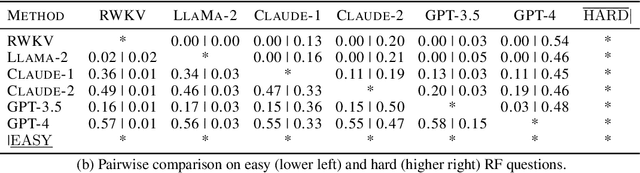
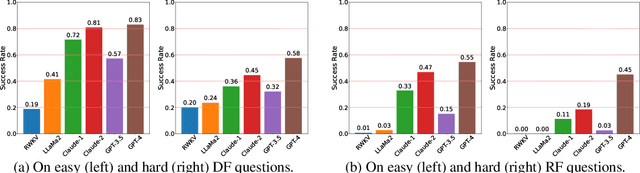
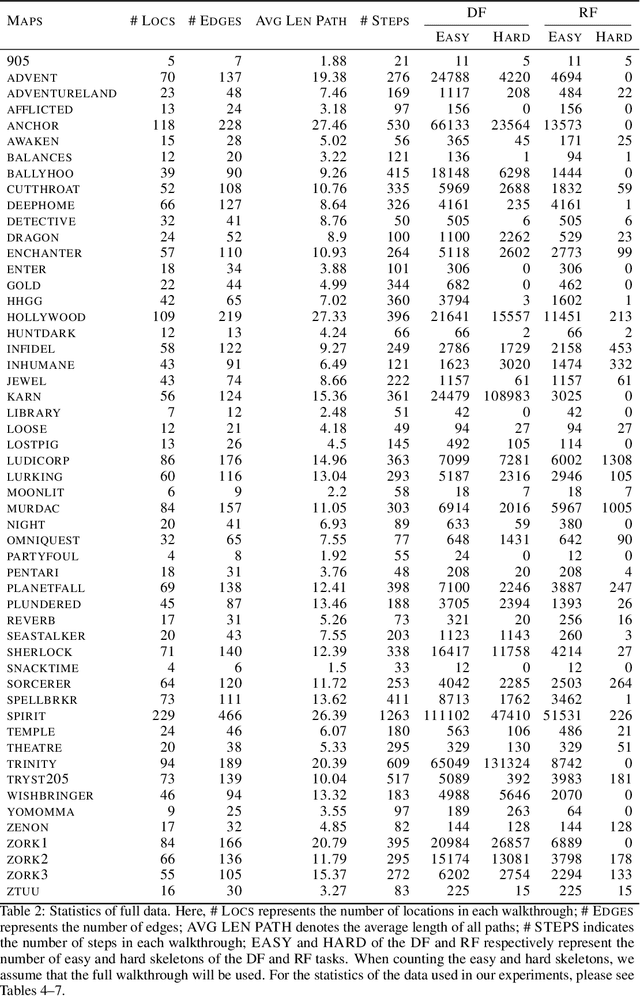
Large language models such as ChatGPT and GPT-4 have recently achieved astonishing performance on a variety of natural language processing tasks. In this paper, we propose MANGO, a benchmark to evaluate their capabilities to perform text-based mapping and navigation. Our benchmark includes 53 mazes taken from a suite of textgames: each maze is paired with a walkthrough that visits every location but does not cover all possible paths. The task is question-answering: for each maze, a large language model reads the walkthrough and answers hundreds of mapping and navigation questions such as "How should you go to Attic from West of House?" and "Where are we if we go north and east from Cellar?". Although these questions are easy to humans, it turns out that even GPT-4, the best-to-date language model, performs poorly at answering them. Further, our experiments suggest that a strong mapping and navigation ability would benefit large language models in performing relevant downstream tasks, such as playing textgames. Our MANGO benchmark will facilitate future research on methods that improve the mapping and navigation capabilities of language models. We host our leaderboard, data, code, and evaluation program at https://mango.ttic.edu and https://github.com/oaklight/mango/.
Statler: State-Maintaining Language Models for Embodied Reasoning
Jul 03, 2023



Large language models (LLMs) provide a promising tool that enable robots to perform complex robot reasoning tasks. However, the limited context window of contemporary LLMs makes reasoning over long time horizons difficult. Embodied tasks such as those that one might expect a household robot to perform typically require that the planner consider information acquired a long time ago (e.g., properties of the many objects that the robot previously encountered in the environment). Attempts to capture the world state using an LLM's implicit internal representation is complicated by the paucity of task- and environment-relevant information available in a robot's action history, while methods that rely on the ability to convey information via the prompt to the LLM are subject to its limited context window. In this paper, we propose Statler, a framework that endows LLMs with an explicit representation of the world state as a form of ``memory'' that is maintained over time. Integral to Statler is its use of two instances of general LLMs -- a world-model reader and a world-model writer -- that interface with and maintain the world state. By providing access to this world state ``memory'', Statler improves the ability of existing LLMs to reason over longer time horizons without the constraint of context length. We evaluate the effectiveness of our approach on three simulated table-top manipulation domains and a real robot domain, and show that it improves the state-of-the-art in LLM-based robot reasoning. Project website: https://statler-lm.github.io/
NeRFuser: Large-Scale Scene Representation by NeRF Fusion
May 22, 2023A practical benefit of implicit visual representations like Neural Radiance Fields (NeRFs) is their memory efficiency: large scenes can be efficiently stored and shared as small neural nets instead of collections of images. However, operating on these implicit visual data structures requires extending classical image-based vision techniques (e.g., registration, blending) from image sets to neural fields. Towards this goal, we propose NeRFuser, a novel architecture for NeRF registration and blending that assumes only access to pre-generated NeRFs, and not the potentially large sets of images used to generate them. We propose registration from re-rendering, a technique to infer the transformation between NeRFs based on images synthesized from individual NeRFs. For blending, we propose sample-based inverse distance weighting to blend visual information at the ray-sample level. We evaluate NeRFuser on public benchmarks and a self-collected object-centric indoor dataset, showing the robustness of our method, including to views that are challenging to render from the individual source NeRFs.
DeLiRa: Self-Supervised Depth, Light, and Radiance Fields
Apr 06, 2023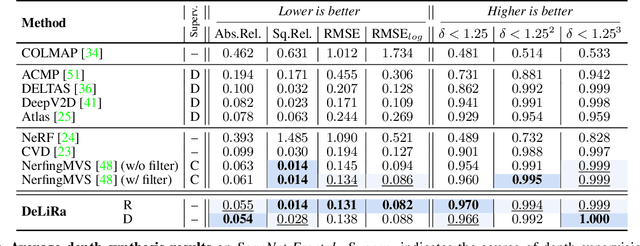


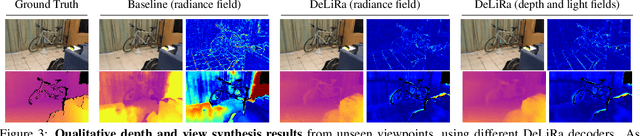
Differentiable volumetric rendering is a powerful paradigm for 3D reconstruction and novel view synthesis. However, standard volume rendering approaches struggle with degenerate geometries in the case of limited viewpoint diversity, a common scenario in robotics applications. In this work, we propose to use the multi-view photometric objective from the self-supervised depth estimation literature as a geometric regularizer for volumetric rendering, significantly improving novel view synthesis without requiring additional information. Building upon this insight, we explore the explicit modeling of scene geometry using a generalist Transformer, jointly learning a radiance field as well as depth and light fields with a set of shared latent codes. We demonstrate that sharing geometric information across tasks is mutually beneficial, leading to improvements over single-task learning without an increase in network complexity. Our DeLiRa architecture achieves state-of-the-art results on the ScanNet benchmark, enabling high quality volumetric rendering as well as real-time novel view and depth synthesis in the limited viewpoint diversity setting.
Depth Field Networks for Generalizable Multi-view Scene Representation
Jul 28, 2022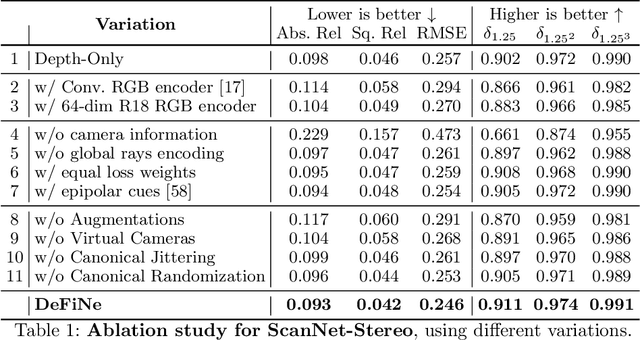

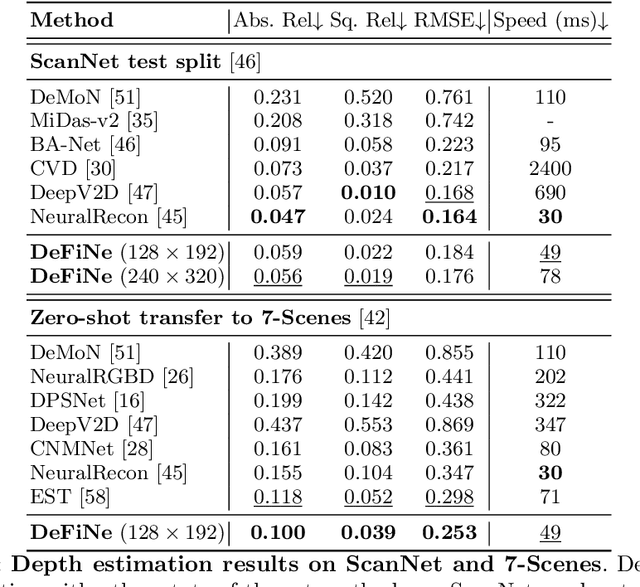
Modern 3D computer vision leverages learning to boost geometric reasoning, mapping image data to classical structures such as cost volumes or epipolar constraints to improve matching. These architectures are specialized according to the particular problem, and thus require significant task-specific tuning, often leading to poor domain generalization performance. Recently, generalist Transformer architectures have achieved impressive results in tasks such as optical flow and depth estimation by encoding geometric priors as inputs rather than as enforced constraints. In this paper, we extend this idea and propose to learn an implicit, multi-view consistent scene representation, introducing a series of 3D data augmentation techniques as a geometric inductive prior to increase view diversity. We also show that introducing view synthesis as an auxiliary task further improves depth estimation. Our Depth Field Networks (DeFiNe) achieve state-of-the-art results in stereo and video depth estimation without explicit geometric constraints, and improve on zero-shot domain generalization by a wide margin.
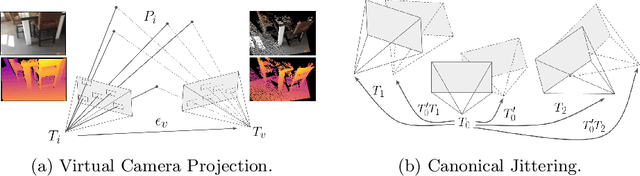
Self-Supervised Camera Self-Calibration from Video
Dec 06, 2021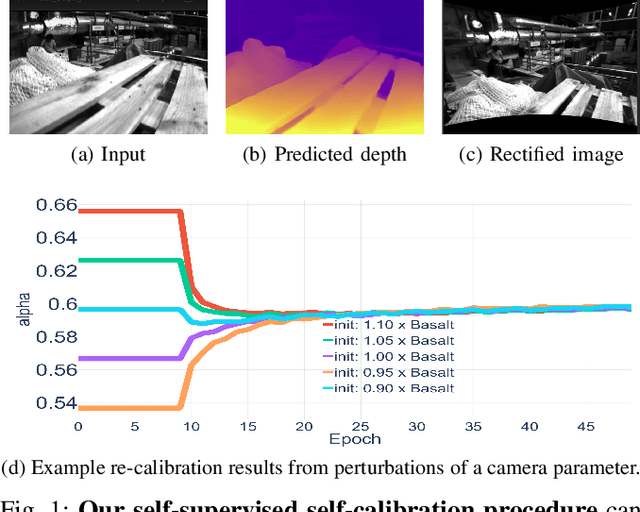
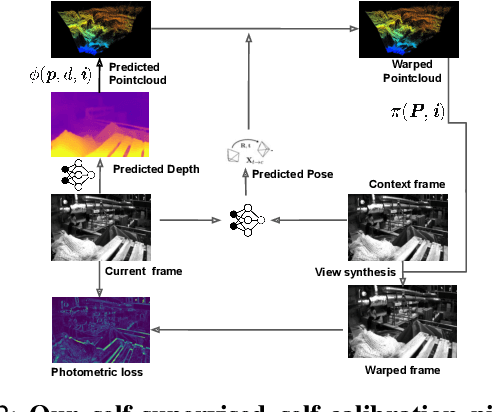
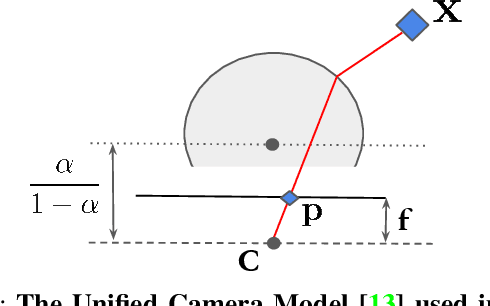

Camera calibration is integral to robotics and computer vision algorithms that seek to infer geometric properties of the scene from visual input streams. In practice, calibration is a laborious procedure requiring specialized data collection and careful tuning. This process must be repeated whenever the parameters of the camera change, which can be a frequent occurrence for mobile robots and autonomous vehicles. In contrast, self-supervised depth and ego-motion estimation approaches can bypass explicit calibration by inferring per-frame projection models that optimize a view synthesis objective. In this paper, we extend this approach to explicitly calibrate a wide range of cameras from raw videos in the wild. We propose a learning algorithm to regress per-sequence calibration parameters using an efficient family of general camera models. Our procedure achieves self-calibration results with sub-pixel reprojection error, outperforming other learning-based methods. We validate our approach on a wide variety of camera geometries, including perspective, fisheye, and catadioptric. Finally, we show that our approach leads to improvements in the downstream task of depth estimation, achieving state-of-the-art results on the EuRoC dataset with greater computational efficiency than contemporary methods.