 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOdysseyArena: Benchmarking Large Language Models For Long-Horizon, Active and Inductive Interactions
Feb 05, 2026The rapid advancement of Large Language Models (LLMs) has catalyzed the development of autonomous agents capable of navigating complex environments. However, existing evaluations primarily adopt a deductive paradigm, where agents execute tasks based on explicitly provided rules and static goals, often within limited planning horizons. Crucially, this neglects the inductive necessity for agents to discover latent transition laws from experience autonomously, which is the cornerstone for enabling agentic foresight and sustaining strategic coherence. To bridge this gap, we introduce OdysseyArena, which re-centers agent evaluation on long-horizon, active, and inductive interactions. We formalize and instantiate four primitives, translating abstract transition dynamics into concrete interactive environments. Building upon this, we establish OdysseyArena-Lite for standardized benchmarking, providing a set of 120 tasks to measure an agent's inductive efficiency and long-horizon discovery. Pushing further, we introduce OdysseyArena-Challenge to stress-test agent stability across extreme interaction horizons (e.g., > 200 steps). Extensive experiments on 15+ leading LLMs reveal that even frontier models exhibit a deficiency in inductive scenarios, identifying a critical bottleneck in the pursuit of autonomous discovery in complex environments. Our code and data are available at https://github.com/xufangzhi/Odyssey-Arena
TIDE: Trajectory-based Diagnostic Evaluation of Test-Time Improvement in LLM Agents
Feb 03, 2026Recent advances in autonomous LLM agents demonstrate their ability to improve performance through iterative interaction with the environment. We define this paradigm as Test-Time Improvement (TTI). However, the mechanisms under how and why TTI succeed or fail remain poorly understood, and existing evaluation metrics fail to capture their task optimization efficiency, behavior adaptation after erroneous actions, and the specific utility of working memory for task completion. To address these gaps, we propose Test-time Improvement Diagnostic Evaluation (TIDE), an agent-agnostic and environment-agnostic framework that decomposes TTI into three comprehensive and interconnected dimensions. The framework measures (1) the overall temporal dynamics of task completion and (2) identifies whether performance is primarily constrained by recursive looping behaviors or (3) by burdensome accumulated memory. Through extensive experiments across diverse agents and environments, TIDE highlights that improving agent performance requires more than scaling internal reasoning, calling for explicitly optimizing the interaction dynamics between the agent and the environment.
OS-Symphony: A Holistic Framework for Robust and Generalist Computer-Using Agent
Jan 12, 2026While Vision-Language Models (VLMs) have significantly advanced Computer-Using Agents (CUAs), current frameworks struggle with robustness in long-horizon workflows and generalization in novel domains. These limitations stem from a lack of granular control over historical visual context curation and the absence of visual-aware tutorial retrieval. To bridge these gaps, we introduce OS-Symphony, a holistic framework that comprises an Orchestrator coordinating two key innovations for robust automation: (1) a Reflection-Memory Agent that utilizes milestone-driven long-term memory to enable trajectory-level self-correction, effectively mitigating visual context loss in long-horizon tasks; (2) Versatile Tool Agents featuring a Multimodal Searcher that adopts a SeeAct paradigm to navigate a browser-based sandbox to synthesize live, visually aligned tutorials, thereby resolving fidelity issues in unseen scenarios. Experimental results demonstrate that OS-Symphony delivers substantial performance gains across varying model scales, establishing new state-of-the-art results on three online benchmarks, notably achieving 65.84% on OSWorld.
ScienceBoard: Evaluating Multimodal Autonomous Agents in Realistic Scientific Workflows
May 26, 2025



Large Language Models (LLMs) have extended their impact beyond Natural Language Processing, substantially fostering the development of interdisciplinary research. Recently, various LLM-based agents have been developed to assist scientific discovery progress across multiple aspects and domains. Among these, computer-using agents, capable of interacting with operating systems as humans do, are paving the way to automated scientific problem-solving and addressing routines in researchers' workflows. Recognizing the transformative potential of these agents, we introduce ScienceBoard, which encompasses two complementary contributions: (i) a realistic, multi-domain environment featuring dynamic and visually rich scientific workflows with integrated professional software, where agents can autonomously interact via different interfaces to accelerate complex research tasks and experiments; and (ii) a challenging benchmark of 169 high-quality, rigorously validated real-world tasks curated by humans, spanning scientific-discovery workflows in domains such as biochemistry, astronomy, and geoinformatics. Extensive evaluations of agents with state-of-the-art backbones (e.g., GPT-4o, Claude 3.7, UI-TARS) show that, despite some promising results, they still fall short of reliably assisting scientists in complex workflows, achieving only a 15% overall success rate. In-depth analysis further provides valuable insights for addressing current agent limitations and more effective design principles, paving the way to build more capable agents for scientific discovery. Our code, environment, and benchmark are at https://qiushisun.github.io/ScienceBoard-Home/.
Genius: A Generalizable and Purely Unsupervised Self-Training Framework For Advanced Reasoning
Apr 11, 2025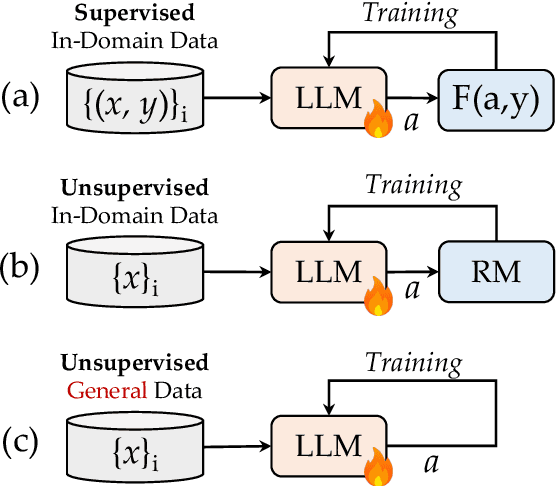
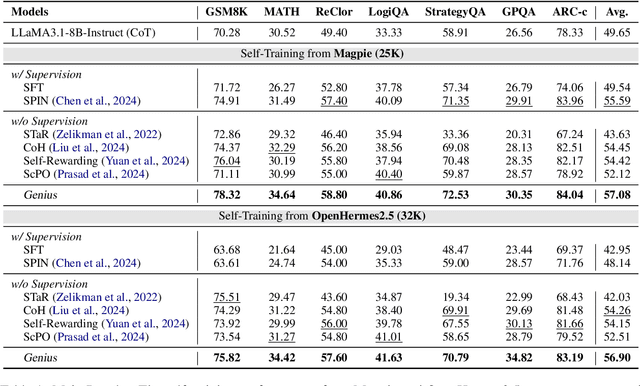
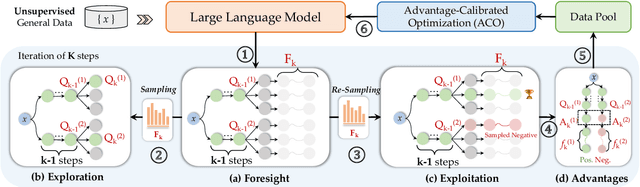

Advancing LLM reasoning skills has captivated wide interest. However, current post-training techniques rely heavily on supervisory signals, such as outcome supervision or auxiliary reward models, which face the problem of scalability and high annotation costs. This motivates us to enhance LLM reasoning without the need for external supervision. We introduce a generalizable and purely unsupervised self-training framework, named Genius. Without external auxiliary, Genius requires to seek the optimal response sequence in a stepwise manner and optimize the LLM. To explore the potential steps and exploit the optimal ones, Genius introduces a stepwise foresight re-sampling strategy to sample and estimate the step value by simulating future outcomes. Further, we recognize that the unsupervised setting inevitably induces the intrinsic noise and uncertainty. To provide a robust optimization, we propose an advantage-calibrated optimization (ACO) loss function to mitigate estimation inconsistencies. Combining these techniques together, Genius provides an advanced initial step towards self-improve LLM reasoning with general queries and without supervision, revolutionizing reasoning scaling laws given the vast availability of general queries. The code will be released at https://github.com/xufangzhi/Genius.
CapArena: Benchmarking and Analyzing Detailed Image Captioning in the LLM Era
Mar 16, 2025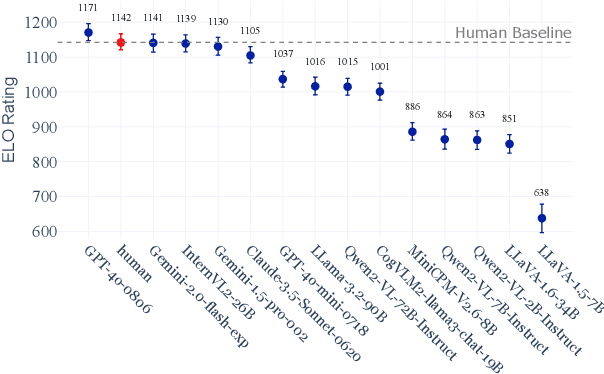
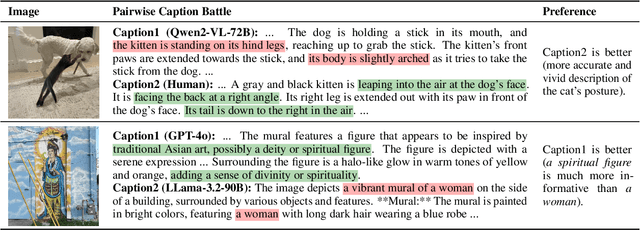
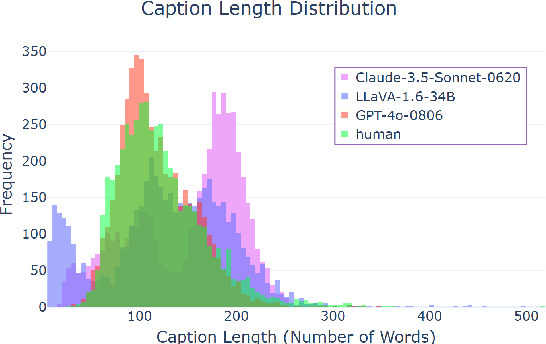
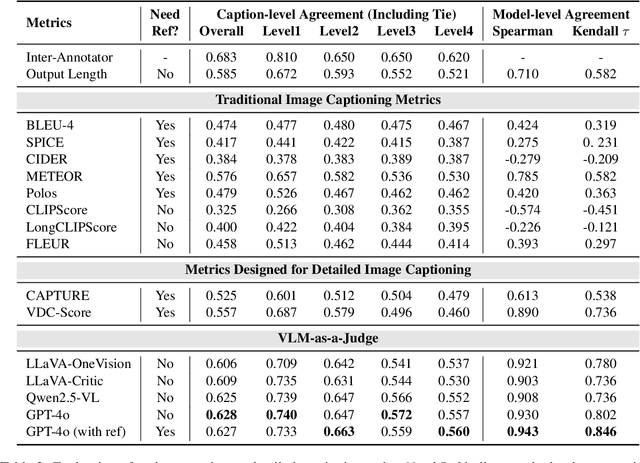
Image captioning has been a longstanding challenge in vision-language research. With the rise of LLMs, modern Vision-Language Models (VLMs) generate detailed and comprehensive image descriptions. However, benchmarking the quality of such captions remains unresolved. This paper addresses two key questions: (1) How well do current VLMs actually perform on image captioning, particularly compared to humans? We built CapArena, a platform with over 6000 pairwise caption battles and high-quality human preference votes. Our arena-style evaluation marks a milestone, showing that leading models like GPT-4o achieve or even surpass human performance, while most open-source models lag behind. (2) Can automated metrics reliably assess detailed caption quality? Using human annotations from CapArena, we evaluate traditional and recent captioning metrics, as well as VLM-as-a-Judge. Our analysis reveals that while some metrics (e.g., METEOR) show decent caption-level agreement with humans, their systematic biases lead to inconsistencies in model ranking. In contrast, VLM-as-a-Judge demonstrates robust discernment at both the caption and model levels. Building on these insights, we release CapArena-Auto, an accurate and efficient automated benchmark for detailed captioning, achieving 94.3% correlation with human rankings at just $4 per test. Data and resources will be open-sourced at https://caparena.github.io.
OS-Genesis: Automating GUI Agent Trajectory Construction via Reverse Task Synthesis
Dec 27, 2024



Graphical User Interface (GUI) agents powered by Vision-Language Models (VLMs) have demonstrated human-like computer control capability. Despite their utility in advancing digital automation, a critical bottleneck persists: collecting high-quality trajectory data for training. Common practices for collecting such data rely on human supervision or synthetic data generation through executing pre-defined tasks, which are either resource-intensive or unable to guarantee data quality. Moreover, these methods suffer from limited data diversity and significant gaps between synthetic data and real-world environments. To address these challenges, we propose OS-Genesis, a novel GUI data synthesis pipeline that reverses the conventional trajectory collection process. Instead of relying on pre-defined tasks, OS-Genesis enables agents first to perceive environments and perform step-wise interactions, then retrospectively derive high-quality tasks to enable trajectory-level exploration. A trajectory reward model is then employed to ensure the quality of the generated trajectories. We demonstrate that training GUI agents with OS-Genesis significantly improves their performance on highly challenging online benchmarks. In-depth analysis further validates OS-Genesis's efficiency and its superior data quality and diversity compared to existing synthesis methods. Our codes, data, and checkpoints are available at \href{https://qiushisun.github.io/OS-Genesis-Home/}{OS-Genesis Homepage}.
OS-ATLAS: A Foundation Action Model for Generalist GUI Agents
Oct 30, 2024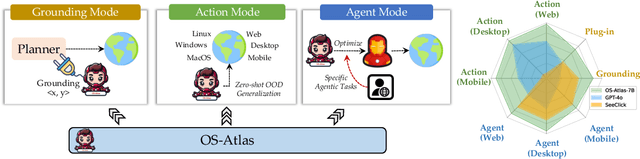
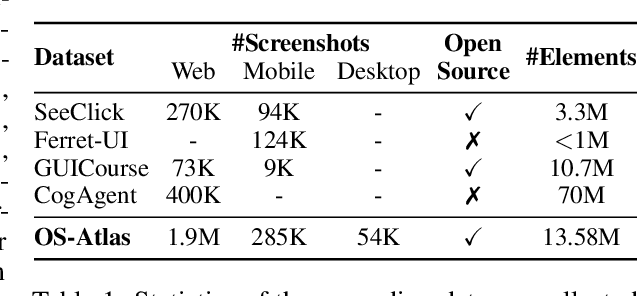
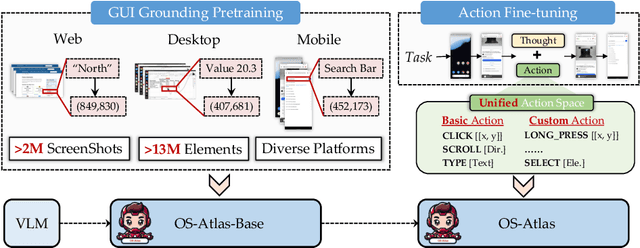
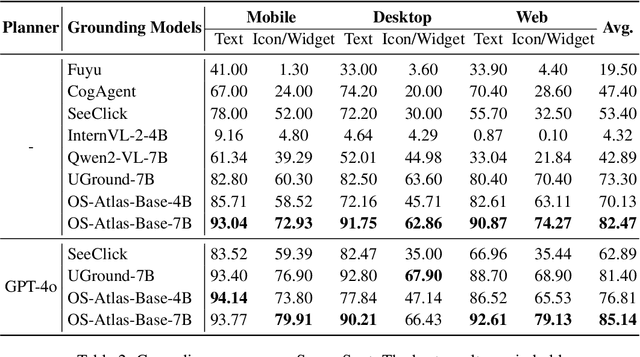
Existing efforts in building GUI agents heavily rely on the availability of robust commercial Vision-Language Models (VLMs) such as GPT-4o and GeminiProVision. Practitioners are often reluctant to use open-source VLMs due to their significant performance lag compared to their closed-source counterparts, particularly in GUI grounding and Out-Of-Distribution (OOD) scenarios. To facilitate future research in this area, we developed OS-Atlas - a foundational GUI action model that excels at GUI grounding and OOD agentic tasks through innovations in both data and modeling. We have invested significant engineering effort in developing an open-source toolkit for synthesizing GUI grounding data across multiple platforms, including Windows, Linux, MacOS, Android, and the web. Leveraging this toolkit, we are releasing the largest open-source cross-platform GUI grounding corpus to date, which contains over 13 million GUI elements. This dataset, combined with innovations in model training, provides a solid foundation for OS-Atlas to understand GUI screenshots and generalize to unseen interfaces. Through extensive evaluation across six benchmarks spanning three different platforms (mobile, desktop, and web), OS-Atlas demonstrates significant performance improvements over previous state-of-the-art models. Our evaluation also uncovers valuable insights into continuously improving and scaling the agentic capabilities of open-source VLMs.
Vision-Language Models Can Self-Improve Reasoning via Reflection
Oct 30, 2024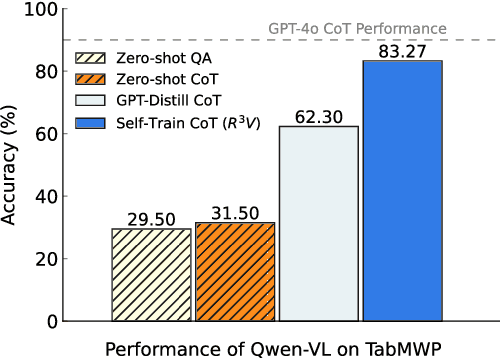
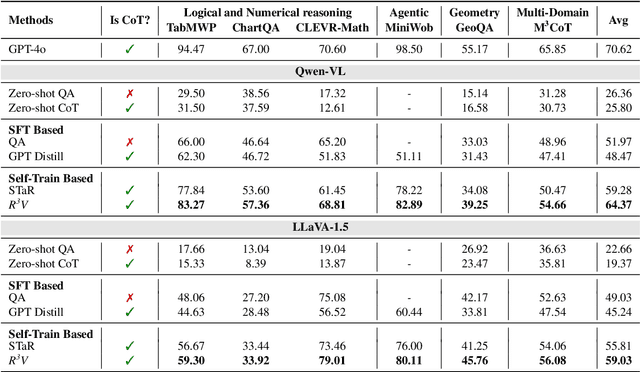
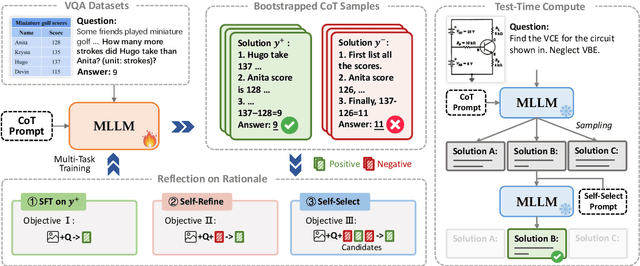
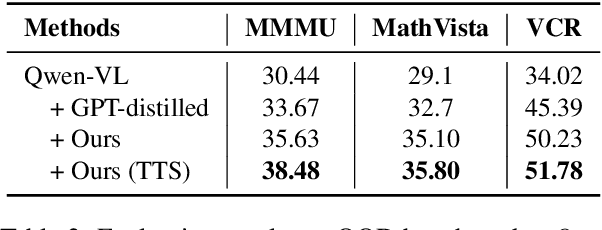
Chain-of-thought (CoT) has proven to improve the reasoning capability of large language models (LLMs). However, due to the complexity of multimodal scenarios and the difficulty in collecting high-quality CoT data, CoT reasoning in multimodal LLMs has been largely overlooked. To this end, we propose a simple yet effective self-training framework, R3V, which iteratively enhances the model's Vision-language Reasoning by Reflecting on CoT Rationales. Our framework consists of two interleaved parts: (1) iteratively bootstrapping positive and negative solutions for reasoning datasets, and (2) reflection on rationale for learning from mistakes. Specifically, we introduce the self-refine and self-select losses, enabling the model to refine flawed rationale and derive the correct answer by comparing rationale candidates. Experiments on a wide range of vision-language tasks show that R3V consistently improves multimodal LLM reasoning, achieving a relative improvement of 23 to 60 percent over GPT-distilled baselines. Additionally, our approach supports self-reflection on generated solutions, further boosting performance through test-time computation.
Interactive Evolution: A Neural-Symbolic Self-Training Framework For Large Language Models
Jun 17, 2024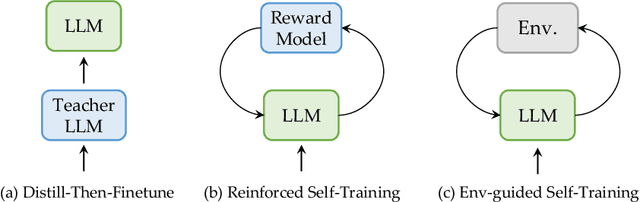

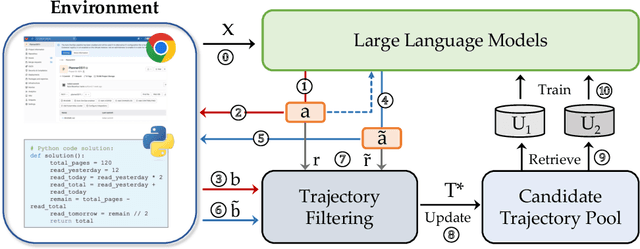
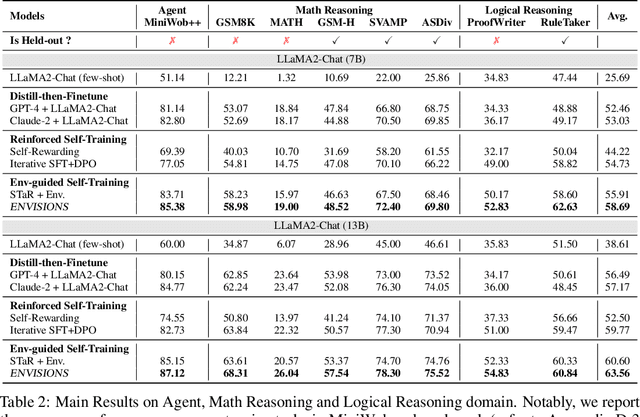
One of the primary driving forces contributing to the superior performance of Large Language Models (LLMs) is the extensive availability of human-annotated natural language data, which is used for alignment fine-tuning. This inspired researchers to investigate self-training methods to mitigate the extensive reliance on human annotations. However, the current success of self-training has been primarily observed in natural language scenarios, rather than in the increasingly important neural-symbolic scenarios. To this end, we propose an environment-guided neural-symbolic self-training framework named ENVISIONS. It aims to overcome two main challenges: (1) the scarcity of symbolic data, and (2) the limited proficiency of LLMs in processing symbolic language. Extensive evaluations conducted on three distinct domains demonstrate the effectiveness of our approach. Additionally, we have conducted a comprehensive analysis to uncover the factors contributing to ENVISIONS's success, thereby offering valuable insights for future research in this area. Code will be available at \url{https://github.com/xufangzhi/ENVISIONS}.