 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCookie-Bench: Continuous On-screen Key Interaction Evaluation for Web Generation
May 28, 2026Front-end web code has become a core product surface for every frontier LLM release, yet evaluating these interactive applications at development speed remains costly because human-judged leaderboards like Arena do not scale. Existing automated proxies typically lean on reference implementations, test suites, or rigid checklists, and tend to miss the reasoned synthesis a human reviewer performs over a live session. We articulate a new evaluation regime that is simultaneously reference-free, autonomously driven, and holistically reasoned, and instantiate it through two artifacts. \textbf{\dataname} is an 11-domain, 54-leaf, 1,000-query WebDev benchmark spanning both static-presentation and interactive-application tasks, balanced across three difficulty tiers and three target-language groups, with briefs rewritten to resist recall from circulated prompts. \textbf{\framename}, grounded in Flavell's metacognitive monitoring, separates evidence accumulation from judgment across three stages: Static Perception forms a first impression from passive observation; Agent-Driven Interaction explores the application autonomously while capturing continuous screen video, audio, and per-step screenshots; Dynamic Scoring issues holistic functionality and aesthetics verdicts with structured failure attribution only after the evidence chain is complete. On \dataname, \framename aligns closely with expert human ratings while surfacing substantial headroom across 13 frontier LLMs on interactive web generation. \noindenthttps://anonymous.4open.science/r/Cookie-3CE/
A Survey of Audio Reasoning in Multimodal Foundation Models
May 20, 2026Reasoning has become a defining capability of modern foundation models, yet its development in the audio modality remains limited. Audio poses challenges that are distinct from those of text and vision. It is continuous, temporally dense, and contains linguistic, paralinguistic, and environmental information at multiple time scales. As a result, audio reasoning models must align acoustic signals with the discrete semantic space of large language models, while still preserving fine-grained information needed for reliable inference. Progress is also limited by three major obstacles: the scarcity of genuinely audio-grounded reasoning data, shortcut learning and modality hallucination, and the tension between reasoning depth and real-time latency in spoken interaction. In this paper, we present the first dedicated survey of audio reasoning. We provide a unified formulation that distinguishes direct predictive modeling from reasoning-augmented generation, review the architectural and training foundations of audio reasoning models, and systematically organize recent advances in Audio-to-Text, Audio-to-Speech, Audio-Visual Reasoning and Agentic Audio Reasoning. We further examine emerging paradigms such as Chain-of-Thought prompting, supervised fine-tuning, reinforcement learning, and latency-aware spoken interaction, and discuss evaluation practices, open challenges, and future directions. Our goal is to offer a coherent roadmap for developing robust, efficient, and natively grounded audio reasoning systems.
DreamOmni3: Scribble-based Editing and Generation
Dec 27, 2025Recently unified generation and editing models have achieved remarkable success with their impressive performance. These models rely mainly on text prompts for instruction-based editing and generation, but language often fails to capture users intended edit locations and fine-grained visual details. To this end, we propose two tasks: scribble-based editing and generation, that enables more flexible creation on graphical user interface (GUI) combining user textual, images, and freehand sketches. We introduce DreamOmni3, tackling two challenges: data creation and framework design. Our data synthesis pipeline includes two parts: scribble-based editing and generation. For scribble-based editing, we define four tasks: scribble and instruction-based editing, scribble and multimodal instruction-based editing, image fusion, and doodle editing. Based on DreamOmni2 dataset, we extract editable regions and overlay hand-drawn boxes, circles, doodles or cropped image to construct training data. For scribble-based generation, we define three tasks: scribble and instruction-based generation, scribble and multimodal instruction-based generation, and doodle generation, following similar data creation pipelines. For the framework, instead of using binary masks, which struggle with complex edits involving multiple scribbles, images, and instructions, we propose a joint input scheme that feeds both the original and scribbled source images into the model, using different colors to distinguish regions and simplify processing. By applying the same index and position encodings to both images, the model can precisely localize scribbled regions while maintaining accurate editing. Finally, we establish comprehensive benchmarks for these tasks to promote further research. Experimental results demonstrate that DreamOmni3 achieves outstanding performance, and models and code will be publicly released.
CrossVid: A Comprehensive Benchmark for Evaluating Cross-Video Reasoning in Multimodal Large Language Models
Nov 15, 2025Cross-Video Reasoning (CVR) presents a significant challenge in video understanding, which requires simultaneous understanding of multiple videos to aggregate and compare information across groups of videos. Most existing video understanding benchmarks focus on single-video analysis, failing to assess the ability of multimodal large language models (MLLMs) to simultaneously reason over various videos. Recent benchmarks evaluate MLLMs' capabilities on multi-view videos that capture different perspectives of the same scene. However, their limited tasks hinder a thorough assessment of MLLMs in diverse real-world CVR scenarios. To this end, we introduce CrossVid, the first benchmark designed to comprehensively evaluate MLLMs' spatial-temporal reasoning ability in cross-video contexts. Firstly, CrossVid encompasses a wide spectrum of hierarchical tasks, comprising four high-level dimensions and ten specific tasks, thereby closely reflecting the complex and varied nature of real-world video understanding. Secondly, CrossVid provides 5,331 videos, along with 9,015 challenging question-answering pairs, spanning single-choice, multiple-choice, and open-ended question formats. Through extensive experiments on various open-source and closed-source MLLMs, we observe that Gemini-2.5-Pro performs best on CrossVid, achieving an average accuracy of 50.4%. Notably, our in-depth case study demonstrates that most current MLLMs struggle with CVR tasks, primarily due to their inability to integrate or compare evidence distributed across multiple videos for reasoning. These insights highlight the potential of CrossVid to guide future advancements in enhancing MLLMs' CVR capabilities.
DynamicBench: Evaluating Real-Time Report Generation in Large Language Models
Jun 26, 2025Traditional benchmarks for large language models (LLMs) typically rely on static evaluations through storytelling or opinion expression, which fail to capture the dynamic requirements of real-time information processing in contemporary applications. To address this limitation, we present DynamicBench, a benchmark designed to evaluate the proficiency of LLMs in storing and processing up-to-the-minute data. DynamicBench utilizes a dual-path retrieval pipeline, integrating web searches with local report databases. It necessitates domain-specific knowledge, ensuring accurate responses report generation within specialized fields. By evaluating models in scenarios that either provide or withhold external documents, DynamicBench effectively measures their capability to independently process recent information or leverage contextual enhancements. Additionally, we introduce an advanced report generation system adept at managing dynamic information synthesis. Our experimental results confirm the efficacy of our approach, with our method achieving state-of-the-art performance, surpassing GPT4o in document-free and document-assisted scenarios by 7.0% and 5.8%, respectively. The code and data will be made publicly available.
Logits-Based Finetuning
May 30, 2025



The core of out-of-distribution (OOD) detection is to learn the in-distribution (ID) representation, which is distinguishable from OOD samples. Previous work applied recognition-based methods to learn the ID features, which tend to learn shortcuts instead of comprehensive representations. In this work, we find surprisingly that simply using reconstruction-based methods could boost the performance of OOD detection significantly. We deeply explore the main contributors of OOD detection and find that reconstruction-based pretext tasks have the potential to provide a generally applicable and efficacious prior, which benefits the model in learning intrinsic data distributions of the ID dataset. Specifically, we take Masked Image Modeling as a pretext task for our OOD detection framework (MOOD). Without bells and whistles, MOOD outperforms previous SOTA of one-class OOD detection by 5.7%, multi-class OOD detection by 3.0%, and near-distribution OOD detection by 2.1%. It even defeats the 10-shot-per-class outlier exposure OOD detection, although we do not include any OOD samples for our detection. Codes are available at https://github.com/JulietLJY/MOOD.
DreamOmni: Unified Image Generation and Editing
Dec 22, 2024

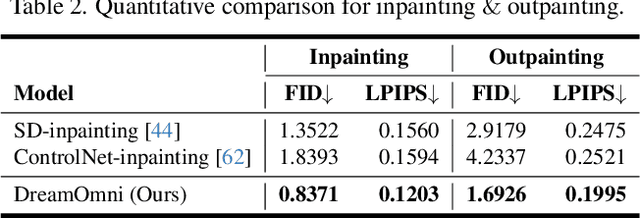

Currently, the success of large language models (LLMs) illustrates that a unified multitasking approach can significantly enhance model usability, streamline deployment, and foster synergistic benefits across different tasks. However, in computer vision, while text-to-image (T2I) models have significantly improved generation quality through scaling up, their framework design did not initially consider how to unify with downstream tasks, such as various types of editing. To address this, we introduce DreamOmni, a unified model for image generation and editing. We begin by analyzing existing frameworks and the requirements of downstream tasks, proposing a unified framework that integrates both T2I models and various editing tasks. Furthermore, another key challenge is the efficient creation of high-quality editing data, particularly for instruction-based and drag-based editing. To this end, we develop a synthetic data pipeline using sticker-like elements to synthesize accurate, high-quality datasets efficiently, which enables editing data scaling up for unified model training. For training, DreamOmni jointly trains T2I generation and downstream tasks. T2I training enhances the model's understanding of specific concepts and improves generation quality, while editing training helps the model grasp the nuances of the editing task. This collaboration significantly boosts editing performance. Extensive experiments confirm the effectiveness of DreamOmni. The code and model will be released.
Lyra: An Efficient and Speech-Centric Framework for Omni-Cognition
Dec 12, 2024



As Multi-modal Large Language Models (MLLMs) evolve, expanding beyond single-domain capabilities is essential to meet the demands for more versatile and efficient AI. However, previous omni-models have insufficiently explored speech, neglecting its integration with multi-modality. We introduce Lyra, an efficient MLLM that enhances multimodal abilities, including advanced long-speech comprehension, sound understanding, cross-modality efficiency, and seamless speech interaction. To achieve efficiency and speech-centric capabilities, Lyra employs three strategies: (1) leveraging existing open-source large models and a proposed multi-modality LoRA to reduce training costs and data requirements; (2) using a latent multi-modality regularizer and extractor to strengthen the relationship between speech and other modalities, thereby enhancing model performance; and (3) constructing a high-quality, extensive dataset that includes 1.5M multi-modal (language, vision, audio) data samples and 12K long speech samples, enabling Lyra to handle complex long speech inputs and achieve more robust omni-cognition. Compared to other omni-methods, Lyra achieves state-of-the-art performance on various vision-language, vision-speech, and speech-language benchmarks, while also using fewer computational resources and less training data.
VisionZip: Longer is Better but Not Necessary in Vision Language Models
Dec 05, 2024



Recent advancements in vision-language models have enhanced performance by increasing the length of visual tokens, making them much longer than text tokens and significantly raising computational costs. However, we observe that the visual tokens generated by popular vision encoders, such as CLIP and SigLIP, contain significant redundancy. To address this, we introduce VisionZip, a simple yet effective method that selects a set of informative tokens for input to the language model, reducing visual token redundancy and improving efficiency while maintaining model performance. The proposed VisionZip can be widely applied to image and video understanding tasks and is well-suited for multi-turn dialogues in real-world scenarios, where previous methods tend to underperform. Experimental results show that VisionZip outperforms the previous state-of-the-art method by at least 5% performance gains across nearly all settings. Moreover, our method significantly enhances model inference speed, improving the prefilling time by 8x and enabling the LLaVA-Next 13B model to infer faster than the LLaVA-Next 7B model while achieving better results. Furthermore, we analyze the causes of this redundancy and encourage the community to focus on extracting better visual features rather than merely increasing token length. Our code is available at https://github.com/dvlab-research/VisionZip .
DAPE V2: Process Attention Score as Feature Map for Length Extrapolation
Oct 07, 2024



The attention mechanism is a fundamental component of the Transformer model, contributing to interactions among distinct tokens, in contrast to earlier feed-forward neural networks. In general, the attention scores are determined simply by the key-query products. However, this work's occasional trial (combining DAPE and NoPE) of including additional MLPs on attention scores without position encoding indicates that the classical key-query multiplication may limit the performance of Transformers. In this work, we conceptualize attention as a feature map and apply the convolution operator (for neighboring attention scores across different heads) to mimic the processing methods in computer vision. Specifically, the main contribution of this paper is identifying and interpreting the Transformer length extrapolation problem as a result of the limited expressiveness of the naive query and key dot product, and we successfully translate the length extrapolation issue into a well-understood feature map processing problem. The novel insight, which can be adapted to various attention-related models, reveals that the current Transformer architecture has the potential for further evolution. Extensive experiments demonstrate that treating attention as a feature map and applying convolution as a processing method significantly enhances Transformer performance.