 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Source-free Domain Adaptation in Open-set Medical Image Segmentation via Decomposed Uncertainty and Prototype Discrepancy
Jun 07, 2026Deep learning (DL) methods are challenged to demonstrate robust performance across different segmentation datasets due to domain shifts, but active domain adaptation techniques enhance their generalization performance by querying a few samples from target domains for adaptation training. However in clinical practice, target domains often include private classes of new anatomical structures or pathologies that are not presented in the source data, and existing methods implement closed-set segmentation where source and target domains have the same segmentation classes. Additionally, source data are often inaccessible during adaptation due to strict data privacy regulations. To address these limitations, we propose an Active Source-free Open-set Domain Adaptation (ASFOSDA) method which is the first work to implement active learning for adapting DL models in open-set medical image segmentation without the access to source data. This method employs an active open-set query strategy to select the most informative target samples for training models based on Class-aware Decomposed Uncertainty (CDU) and Class-agnostic Prototype Discrepancy (CPD). CDU measures sample aleatoric uncertainty and model epistemic uncertainty by employing test time augmentation in stochastic processes. CPD measures cross-domain and self-domain discrepancy for selecting diverse samples. Subsequently, to boost the adaptation performance by enhancing training samples, a Target-refined Self-training strategy is proposed to generate high-quality pseudo labels for unselected samples, thus combining them with labeled samples for a semi-supervised training. We evaluated our method on cross-domain open-set volumetric medical image segmentation tasks, and it outperformed state-of-the-art adaptation methods.
From Accounting to Coordination: A Virtual Water-Aware Electricity-Computation-Water Nexus Framework for Data Center Dispatch
May 25, 2026The expansion of data centers (DCs) drives a sustained increase in electricity demand and associated water withdrawals at generation sites. These withdrawals occur at generation sites and are virtually allocated to demand based on network power flows. Consequently, the actual water footprint of a specific load varies dynamically with generation dispatch and network conditions. Existing approaches typically rely on static statistical accounting to quantify these water footprints. However, such static methods fail to capture how dispatch optimization and workload relocation dynamically affect water withdrawals. As a result, static statistical accounting approaches remain decoupled from the optimization process, rendering them incapable of guiding workload relocation or power dispatch to mitigate water stress. To address this limitation, this paper develops an operational electricity-computation-water (ECW) nexus framework that internalizes virtual water impacts directly into power system dispatch. The framework represents dispatch optimization as a differentiable optimization layer embedded within a deep learning architecture, enabling efficient end-to-end learning of coordination policies while preserving operational feasibility. Combined with fixed-point coordination, the framework enforces consistency between virtual water attribution and physical generation-side withdrawals. Case studies on the IEEE 30-bus and 118-bus test systems demonstrate reliable convergence, exact power-water consistency, and reductions of approximately 3-5% in generation-related freshwater withdrawals under water-constrained conditions.
Three-Stage Learning Unlocks Strong Performance in Simple Models for Long-Term Time Series Forecasting
May 13, 2026Recent studies on long-term time series forecasting have shown that simple linear models and MLP-based predictors can achieve strong performance without increasingly complex architectures. However, many competitive baselines still rely on structural priors such as frequency-domain modeling, explicit decomposition, multi-scale mixing, or sophisticated cross-variable interaction modules, while paying less attention to how simple temporal mappings should be trained and organized. In this paper, we propose STAIR, short for Stagewise Temporal Adaptation via Individualization and Residual Learning, a training paradigm for long-term time series forecasting that aims to unlock the capacity of simple temporal mapping models without introducing complex architectural modules. STAIR decomposes forecasting ability into three progressive stages: it first learns common temporal dynamics across variables through a shared temporal mapping, then adapts the shared model to each variable via channel-wise fine-tuning to capture variable-specific patterns, and finally complements the backbone with cross-variable information through residual learning. We further introduce Shared-to-Individual Fine-tuning and alpha-RevIN to mitigate the limitations of strict channel independence and the overly strong normalization prior induced by standard RevIN. This design gradually increases modeling flexibility while keeping the core temporal predictor as a shallow MLP in the main experiments, with linear variants analyzed separately. Experiments on nine long-term forecasting benchmarks show that STAIR matches or outperforms recent strong baselines while preserving a simple temporal backbone, providing a concise and effective modeling perspective for long-term time series forecasting.
WaveComm: Lightweight Communication for Collaborative Perception via Wavelet Feature Distillation
Mar 09, 2026In multi-agent collaborative sensing systems, substantial communication overhead from information exchange significantly limits scalability and real-time performance, especially in bandwidth-constrained environments. This often results in degraded performance and reduced reliability. To address this challenge, we propose WaveComm, a wavelet-based communication framework that drastically reduces transmission loads while preserving sensing performance in low-bandwidth scenarios. The core innovation of WaveComm lies in decomposing feature maps using Discrete Wavelet Transform (DWT), transmitting only compact low-frequency components to minimize communication overhead. High-frequency details are omitted, and their effects are reconstructed at the receiver side using a lightweight generator. A Multi-Scale Distillation (MSD) Loss is employed to optimize the reconstruction quality across pixel, structural, semantic, and distributional levels. Experiments on the OPV2V and DAIR-V2X datasets for LiDAR-based and camera-based perception tasks demonstrate that WaveComm maintains state-of-the-art performance even when the communication volume is reduced to 86.3% and 87.0% of the original, respectively. Compared to existing approaches, WaveComm achieves competitive improvements in both communication efficiency and perception accuracy. Ablation studies further validate the effectiveness of its key components.
Hyperbolic Multiview Pretraining for Robotic Manipulation
Mar 05, 20263D-aware visual pretraining has proven effective in improving the performance of downstream robotic manipulation tasks. However, existing methods are constrained to Euclidean embedding spaces, whose flat geometry limits their ability to model structural relations among embeddings. As a result, they struggle to learn structured embeddings that are essential for robust spatial perception in robotic applications. To this end, we propose HyperMVP, a self-supervised framework for \underline{Hyper}bolic \underline{M}ulti\underline{V}iew \underline{P}retraining. Hyperbolic space offers geometric properties well suited for capturing structural relations. Methodologically, we extend the masked autoencoder paradigm and design a GeoLink encoder to learn multiview hyperbolic representations. The pretrained encoder is then finetuned with visuomotor policies on manipulation tasks. In addition, we introduce 3D-MOV, a large-scale dataset comprising multiple types of 3D point clouds to support pretraining. We evaluate HyperMVP on COLOSSEUM, RLBench, and real-world scenarios, where it consistently outperforms strong baselines across diverse tasks and perturbation settings. Our results highlight the potential of 3D-aware pretraining in a non-Euclidean space for learning robust and generalizable robotic manipulation policies.
RoboLight: A Dataset with Linearly Composable Illumination for Robotic Manipulation
Mar 04, 2026In this paper, we introduce RoboLight, the first real-world robotic manipulation dataset capturing synchronized episodes under systematically varied lighting conditions. RoboLight consists of two components. (a) RoboLight-Real contains 2,800 real-world episodes collected in our custom Light Cube setup, a calibrated system equipped with eight programmable RGB LED lights. It includes structured illumination variation along three independently controlled dimensions: color, direction, and intensity. Each dimension is paired with a dedicated task featuring objects of diverse geometries and materials to induce perceptual challenges. All image data are recorded in high-dynamic-range (HDR) format to preserve radiometric accuracy. Leveraging the linearity of light transport, we introduce (b) RoboLight-Synthetic, comprising 196,000 episodes synthesized through interpolation in the HDR image space of RoboLight-Real. In principle, RoboLight-Synthetic can be arbitrarily expanded by refining the interpolation granularity. We further verify the dataset quality through qualitative analysis and real-world policy roll-outs, analyzing task difficulty, distributional diversity, and the effectiveness of synthesized data. We additionally demonstrate three representative use cases of the proposed dataset. The full dataset, along with the system software and hardware design, will be released as open-source to support continued research.
U-Harmony: Enhancing Joint Training for Segmentation Models with Universal Harmonization
Jan 21, 2026In clinical practice, medical segmentation datasets are often limited and heterogeneous, with variations in modalities, protocols, and anatomical targets across institutions. Existing deep learning models struggle to jointly learn from such diverse data, often sacrificing either generalization or domain-specific knowledge. To overcome these challenges, we propose a joint training method called Universal Harmonization (U-Harmony), which can be integrated into deep learning-based architectures with a domain-gated head, enabling a single segmentation model to learn from heterogeneous datasets simultaneously. By integrating U-Harmony, our approach sequentially normalizes and then denormalizes feature distributions to mitigate domain-specific variations while preserving original dataset-specific knowledge. More appealingly, our framework also supports universal modality adaptation, allowing the seamless learning of new imaging modalities and anatomical classes. Extensive experiments on cross-institutional brain lesion datasets demonstrate the effectiveness of our approach, establishing a new benchmark for robust and adaptable 3D medical image segmentation models in real-world clinical settings.
Embodied Robot Manipulation in the Era of Foundation Models: Planning and Learning Perspectives
Dec 28, 2025Recent advances in vision, language, and multimodal learning have substantially accelerated progress in robotic foundation models, with robot manipulation remaining a central and challenging problem. This survey examines robot manipulation from an algorithmic perspective and organizes recent learning-based approaches within a unified abstraction of high-level planning and low-level control. At the high level, we extend the classical notion of task planning to include reasoning over language, code, motion, affordances, and 3D representations, emphasizing their role in structured and long-horizon decision making. At the low level, we propose a training-paradigm-oriented taxonomy for learning-based control, organizing existing methods along input modeling, latent representation learning, and policy learning. Finally, we identify open challenges and prospective research directions related to scalability, data efficiency, multimodal physical interaction, and safety. Together, these analyses aim to clarify the design space of modern foundation models for robotic manipulation.
Every Step Evolves: Scaling Reinforcement Learning for Trillion-Scale Thinking Model
Oct 21, 2025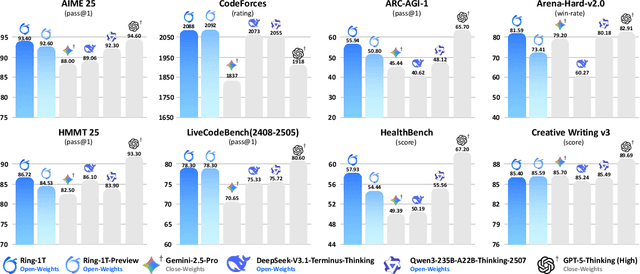
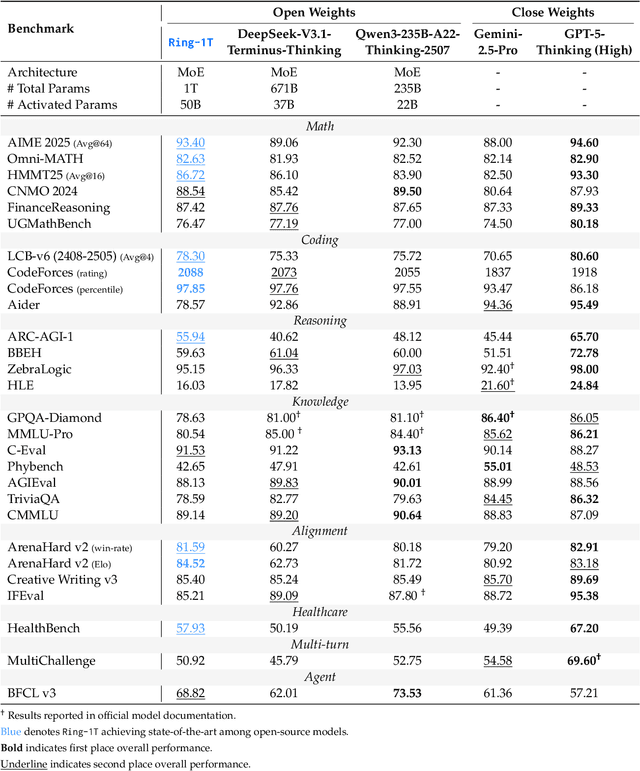
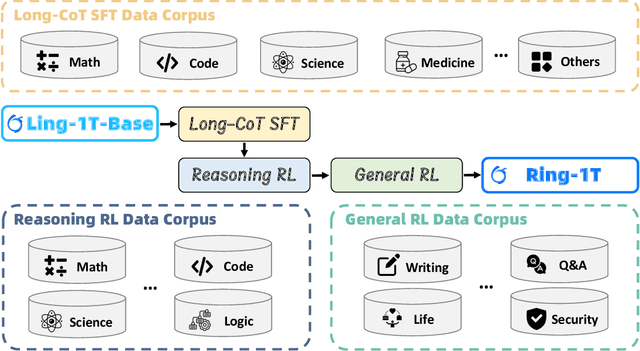
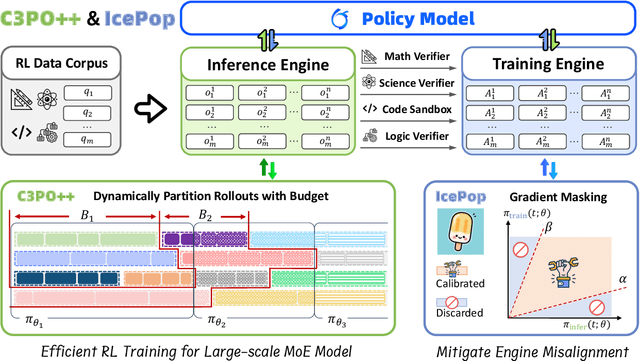
We present Ring-1T, the first open-source, state-of-the-art thinking model with a trillion-scale parameter. It features 1 trillion total parameters and activates approximately 50 billion per token. Training such models at a trillion-parameter scale introduces unprecedented challenges, including train-inference misalignment, inefficiencies in rollout processing, and bottlenecks in the RL system. To address these, we pioneer three interconnected innovations: (1) IcePop stabilizes RL training via token-level discrepancy masking and clipping, resolving instability from training-inference mismatches; (2) C3PO++ improves resource utilization for long rollouts under a token budget by dynamically partitioning them, thereby obtaining high time efficiency; and (3) ASystem, a high-performance RL framework designed to overcome the systemic bottlenecks that impede trillion-parameter model training. Ring-1T delivers breakthrough results across critical benchmarks: 93.4 on AIME-2025, 86.72 on HMMT-2025, 2088 on CodeForces, and 55.94 on ARC-AGI-v1. Notably, it attains a silver medal-level result on the IMO-2025, underscoring its exceptional reasoning capabilities. By releasing the complete 1T parameter MoE model to the community, we provide the research community with direct access to cutting-edge reasoning capabilities. This contribution marks a significant milestone in democratizing large-scale reasoning intelligence and establishes a new baseline for open-source model performance.
Beyond Benchmark: LLMs Evaluation with an Anthropomorphic and Value-oriented Roadmap
Aug 26, 2025For Large Language Models (LLMs), a disconnect persists between benchmark performance and real-world utility. Current evaluation frameworks remain fragmented, prioritizing technical metrics while neglecting holistic assessment for deployment. This survey introduces an anthropomorphic evaluation paradigm through the lens of human intelligence, proposing a novel three-dimensional taxonomy: Intelligence Quotient (IQ)-General Intelligence for foundational capacity, Emotional Quotient (EQ)-Alignment Ability for value-based interactions, and Professional Quotient (PQ)-Professional Expertise for specialized proficiency. For practical value, we pioneer a Value-oriented Evaluation (VQ) framework assessing economic viability, social impact, ethical alignment, and environmental sustainability. Our modular architecture integrates six components with an implementation roadmap. Through analysis of 200+ benchmarks, we identify key challenges including dynamic assessment needs and interpretability gaps. It provides actionable guidance for developing LLMs that are technically proficient, contextually relevant, and ethically sound. We maintain a curated repository of open-source evaluation resources at: https://github.com/onejune2018/Awesome-LLM-Eval.