 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
Vector Quantized Models for Planning
Jun 10, 2021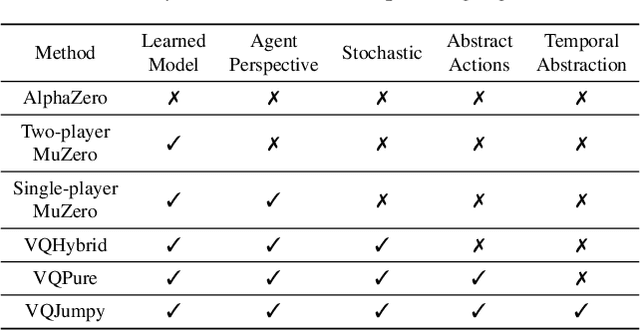
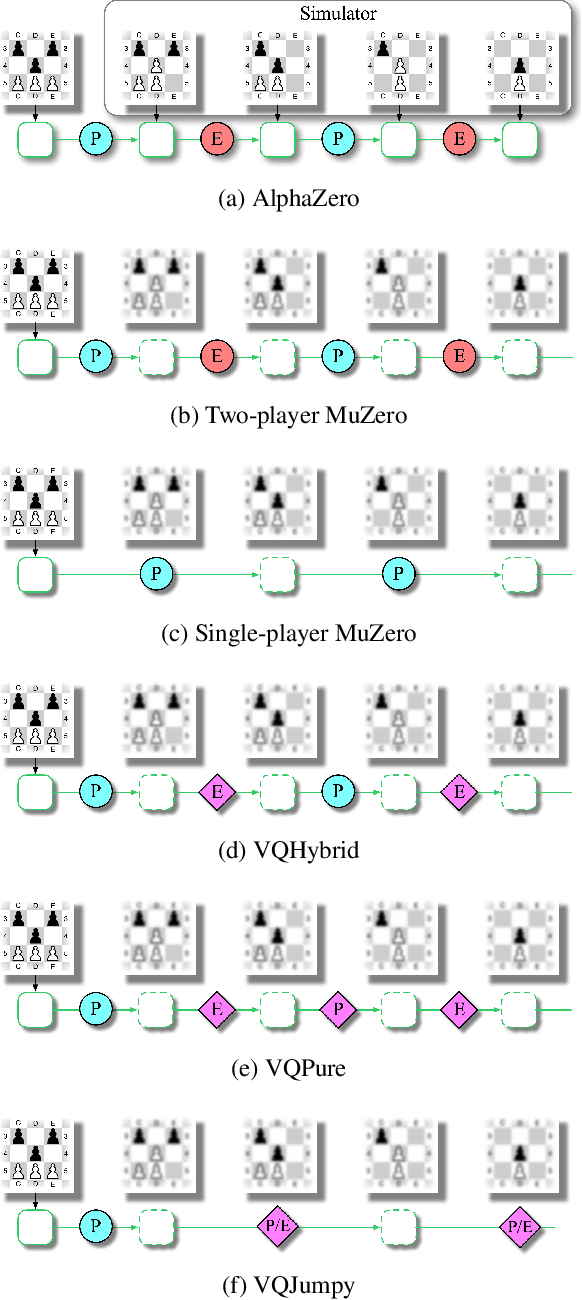
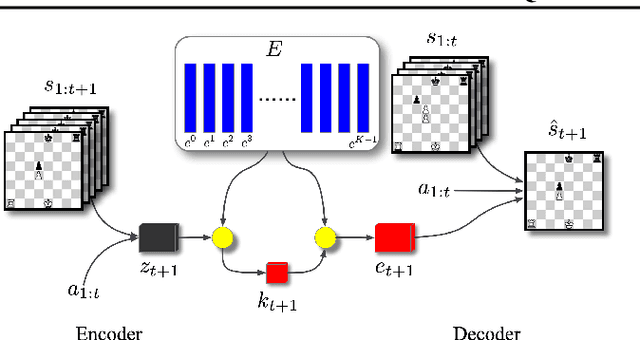
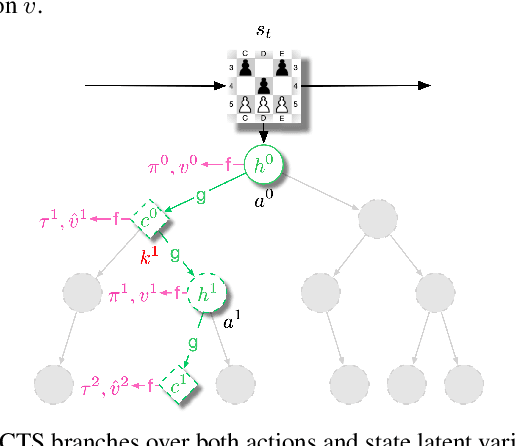
Recent developments in the field of model-based RL have proven successful in a range of environments, especially ones where planning is essential. However, such successes have been limited to deterministic fully-observed environments. We present a new approach that handles stochastic and partially-observable environments. Our key insight is to use discrete autoencoders to capture the multiple possible effects of an action in a stochastic environment. We use a stochastic variant of Monte Carlo tree search to plan over both the agent's actions and the discrete latent variables representing the environment's response. Our approach significantly outperforms an offline version of MuZero on a stochastic interpretation of chess where the opponent is considered part of the environment. We also show that our approach scales to DeepMind Lab, a first-person 3D environment with large visual observations and partial observability.
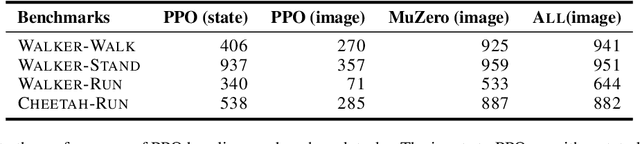
Learning and Planning in Complex Action Spaces
Apr 13, 2021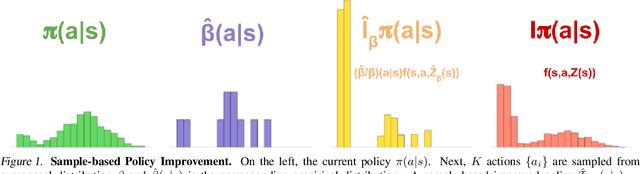
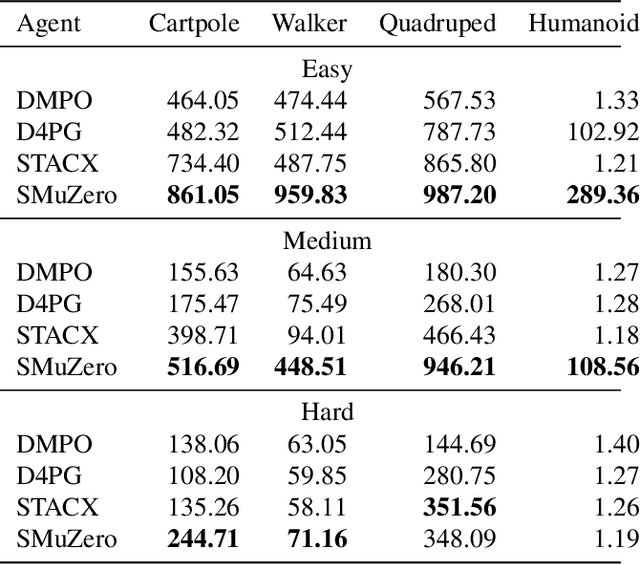
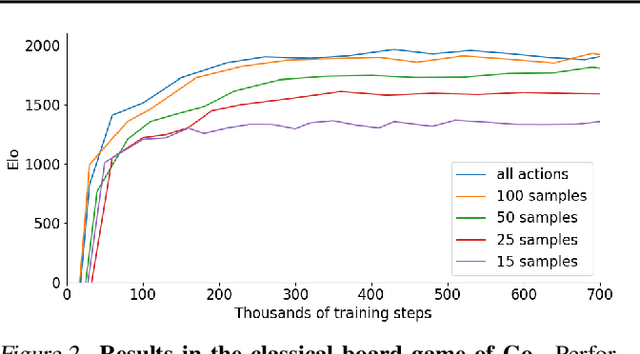
Many important real-world problems have action spaces that are high-dimensional, continuous or both, making full enumeration of all possible actions infeasible. Instead, only small subsets of actions can be sampled for the purpose of policy evaluation and improvement. In this paper, we propose a general framework to reason in a principled way about policy evaluation and improvement over such sampled action subsets. This sample-based policy iteration framework can in principle be applied to any reinforcement learning algorithm based upon policy iteration. Concretely, we propose Sampled MuZero, an extension of the MuZero algorithm that is able to learn in domains with arbitrarily complex action spaces by planning over sampled actions. We demonstrate this approach on the classical board game of Go and on two continuous control benchmark domains: DeepMind Control Suite and Real-World RL Suite.
Online and Offline Reinforcement Learning by Planning with a Learned Model
Apr 13, 2021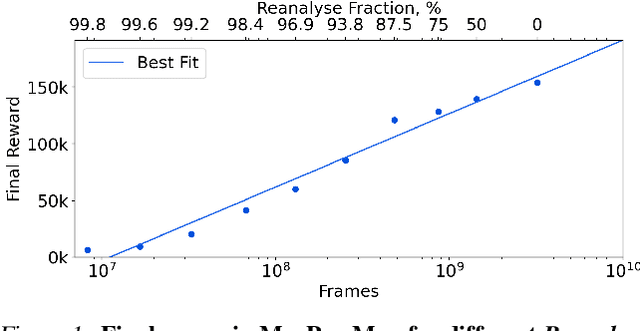
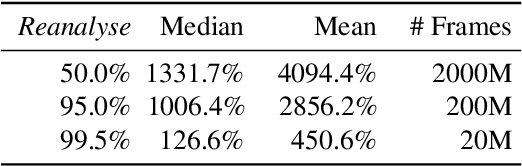
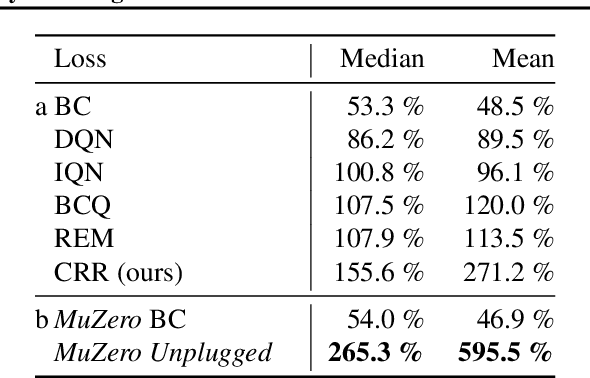
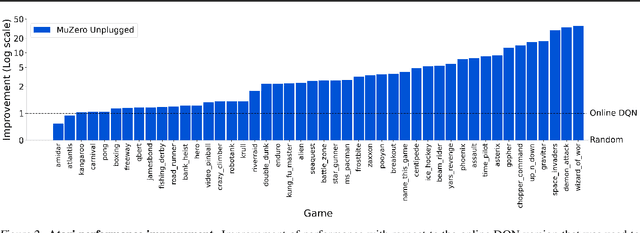
Learning efficiently from small amounts of data has long been the focus of model-based reinforcement learning, both for the online case when interacting with the environment and the offline case when learning from a fixed dataset. However, to date no single unified algorithm could demonstrate state-of-the-art results in both settings. In this work, we describe the Reanalyse algorithm which uses model-based policy and value improvement operators to compute new improved training targets on existing data points, allowing efficient learning for data budgets varying by several orders of magnitude. We further show that Reanalyse can also be used to learn entirely from demonstrations without any environment interactions, as in the case of offline Reinforcement Learning (offline RL). Combining Reanalyse with the MuZero algorithm, we introduce MuZero Unplugged, a single unified algorithm for any data budget, including offline RL. In contrast to previous work, our algorithm does not require any special adaptations for the off-policy or offline RL settings. MuZero Unplugged sets new state-of-the-art results in the RL Unplugged offline RL benchmark as well as in the online RL benchmark of Atari in the standard 200 million frame setting.
Machine Translation Decoding beyond Beam Search
Apr 12, 2021
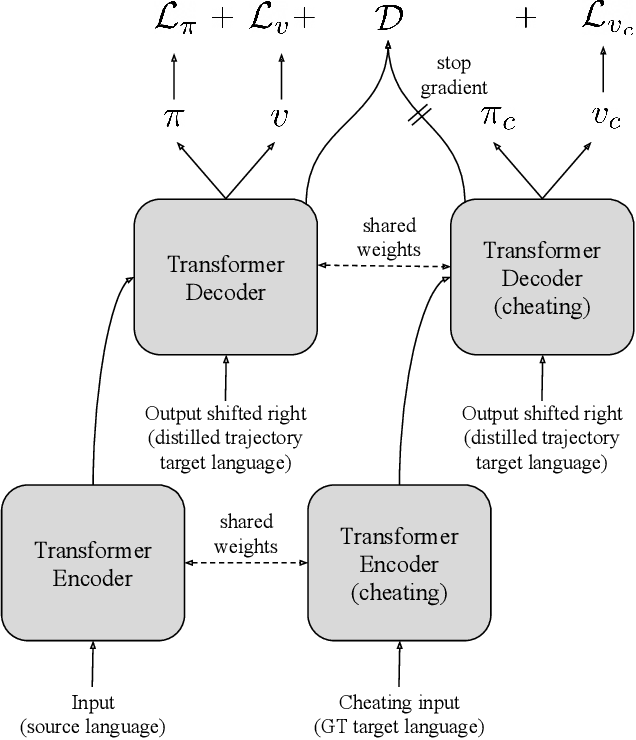

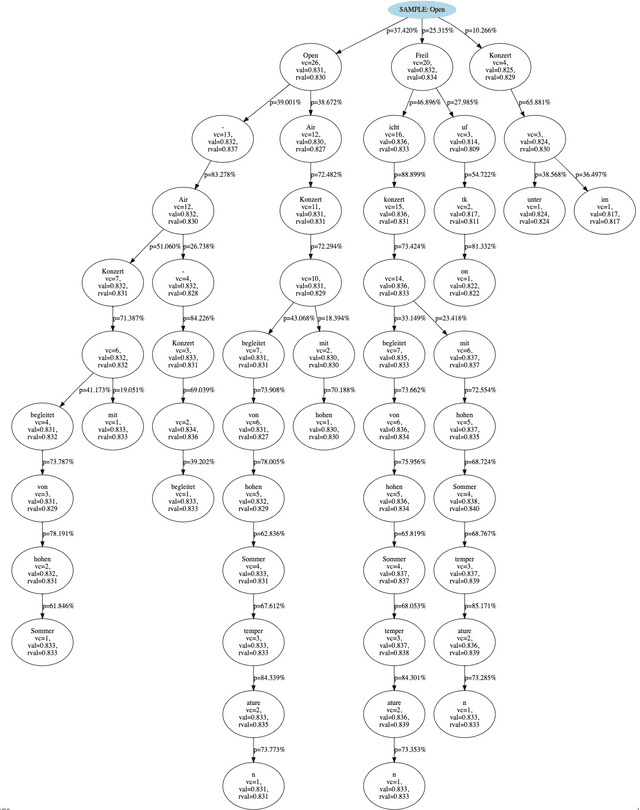
Beam search is the go-to method for decoding auto-regressive machine translation models. While it yields consistent improvements in terms of BLEU, it is only concerned with finding outputs with high model likelihood, and is thus agnostic to whatever end metric or score practitioners care about. Our aim is to establish whether beam search can be replaced by a more powerful metric-driven search technique. To this end, we explore numerous decoding algorithms, including some which rely on a value function parameterised by a neural network, and report results on a variety of metrics. Notably, we introduce a Monte-Carlo Tree Search (MCTS) based method and showcase its competitiveness. We provide a blueprint for how to use MCTS fruitfully in language applications, which opens promising future directions. We find that which algorithm is best heavily depends on the characteristics of the goal metric; we believe that our extensive experiments and analysis will inform further research in this area.
Monte-Carlo Tree Search as Regularized Policy Optimization
Jul 24, 2020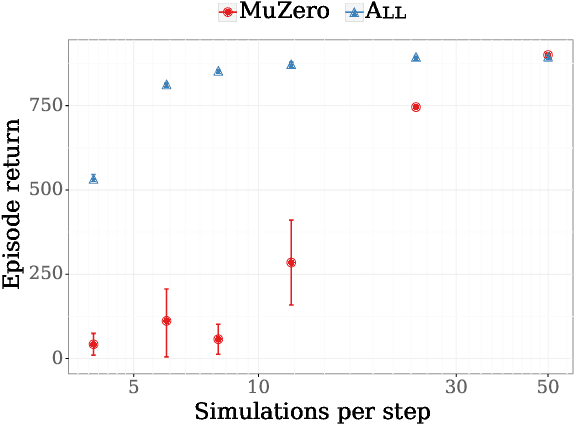
The combination of Monte-Carlo tree search (MCTS) with deep reinforcement learning has led to significant advances in artificial intelligence. However, AlphaZero, the current state-of-the-art MCTS algorithm, still relies on handcrafted heuristics that are only partially understood. In this paper, we show that AlphaZero's search heuristics, along with other common ones such as UCT, are an approximation to the solution of a specific regularized policy optimization problem. With this insight, we propose a variant of AlphaZero which uses the exact solution to this policy optimization problem, and show experimentally that it reliably outperforms the original algorithm in multiple domains.
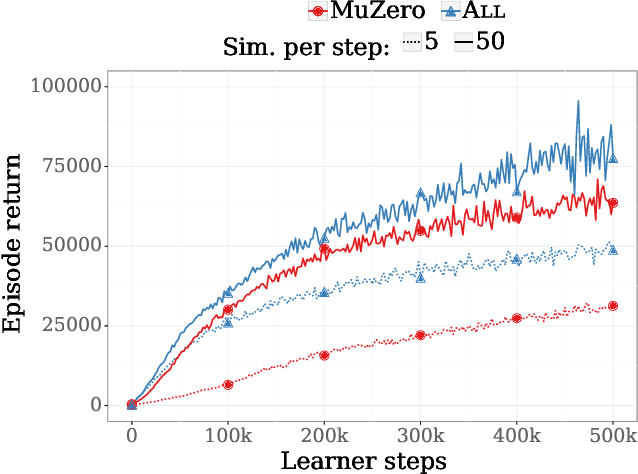
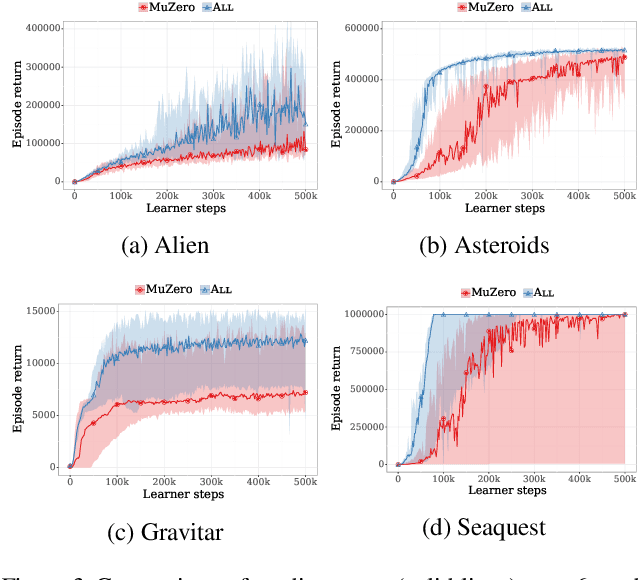
Causally Correct Partial Models for Reinforcement Learning
Feb 07, 2020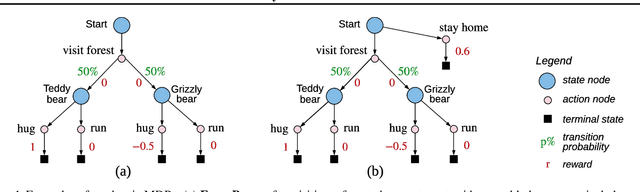
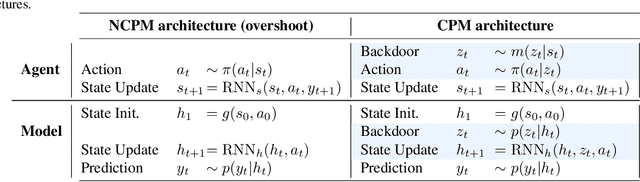

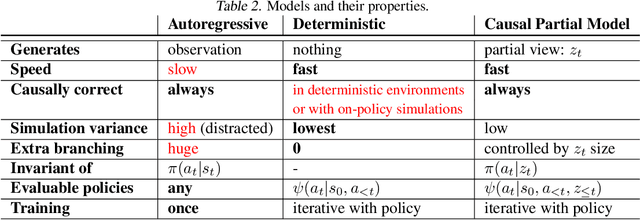
In reinforcement learning, we can learn a model of future observations and rewards, and use it to plan the agent's next actions. However, jointly modeling future observations can be computationally expensive or even intractable if the observations are high-dimensional (e.g. images). For this reason, previous works have considered partial models, which model only part of the observation. In this paper, we show that partial models can be causally incorrect: they are confounded by the observations they don't model, and can therefore lead to incorrect planning. To address this, we introduce a general family of partial models that are provably causally correct, yet remain fast because they do not need to fully model future observations.
Mastering Atari, Go, Chess and Shogi by Planning with a Learned Model
Nov 19, 2019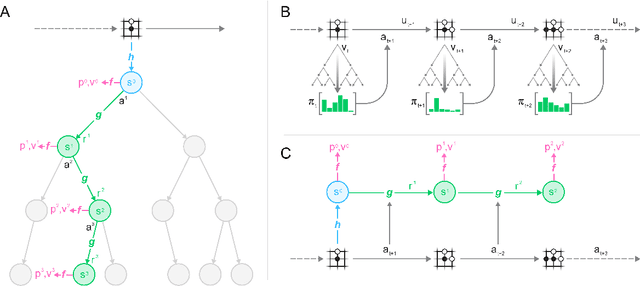
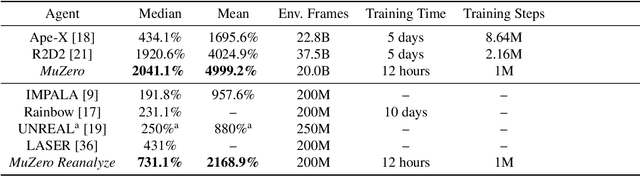
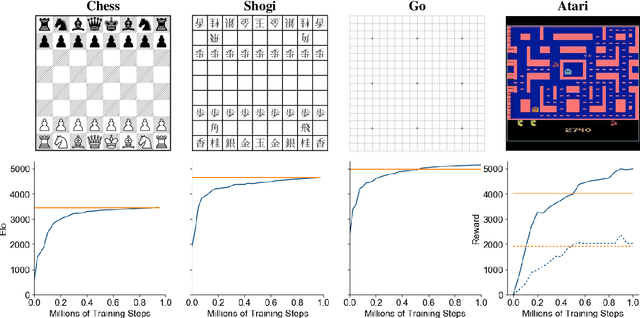
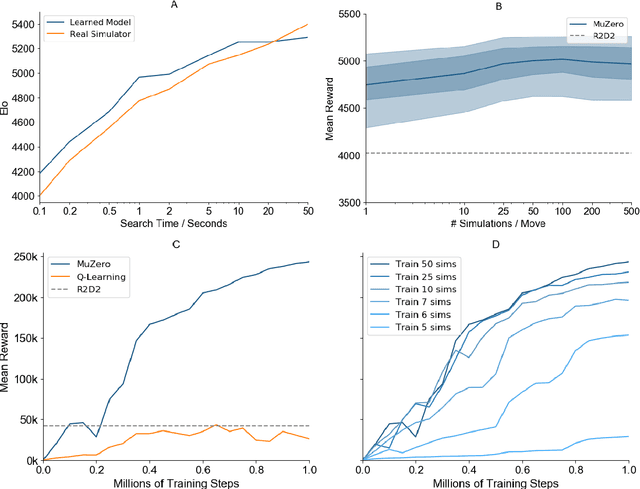
Constructing agents with planning capabilities has long been one of the main challenges in the pursuit of artificial intelligence. Tree-based planning methods have enjoyed huge success in challenging domains, such as chess and Go, where a perfect simulator is available. However, in real-world problems the dynamics governing the environment are often complex and unknown. In this work we present the MuZero algorithm which, by combining a tree-based search with a learned model, achieves superhuman performance in a range of challenging and visually complex domains, without any knowledge of their underlying dynamics. MuZero learns a model that, when applied iteratively, predicts the quantities most directly relevant to planning: the reward, the action-selection policy, and the value function. When evaluated on 57 different Atari games - the canonical video game environment for testing AI techniques, in which model-based planning approaches have historically struggled - our new algorithm achieved a new state of the art. When evaluated on Go, chess and shogi, without any knowledge of the game rules, MuZero matched the superhuman performance of the AlphaZero algorithm that was supplied with the game rules.
Bayesian Optimization in AlphaGo
Dec 17, 2018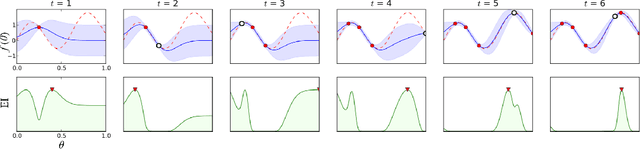


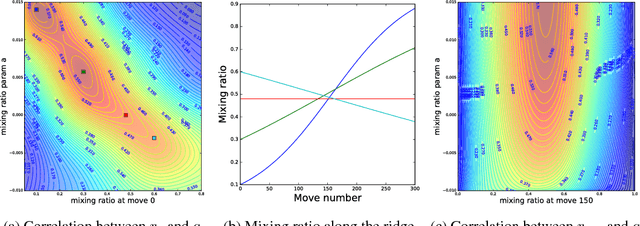
During the development of AlphaGo, its many hyper-parameters were tuned with Bayesian optimization multiple times. This automatic tuning process resulted in substantial improvements in playing strength. For example, prior to the match with Lee Sedol, we tuned the latest AlphaGo agent and this improved its win-rate from 50% to 66.5% in self-play games. This tuned version was deployed in the final match. Of course, since we tuned AlphaGo many times during its development cycle, the compounded contribution was even higher than this percentage. It is our hope that this brief case study will be of interest to Go fans, and also provide Bayesian optimization practitioners with some insights and inspiration.