 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantum Circuit Optimization with AlphaTensor
Mar 05, 2024



A key challenge in realizing fault-tolerant quantum computers is circuit optimization. Focusing on the most expensive gates in fault-tolerant quantum computation (namely, the T gates), we address the problem of T-count optimization, i.e., minimizing the number of T gates that are needed to implement a given circuit. To achieve this, we develop AlphaTensor-Quantum, a method based on deep reinforcement learning that exploits the relationship between optimizing T-count and tensor decomposition. Unlike existing methods for T-count optimization, AlphaTensor-Quantum can incorporate domain-specific knowledge about quantum computation and leverage gadgets, which significantly reduces the T-count of the optimized circuits. AlphaTensor-Quantum outperforms the existing methods for T-count optimization on a set of arithmetic benchmarks (even when compared without making use of gadgets). Remarkably, it discovers an efficient algorithm akin to Karatsuba's method for multiplication in finite fields. AlphaTensor-Quantum also finds the best human-designed solutions for relevant arithmetic computations used in Shor's algorithm and for quantum chemistry simulation, thus demonstrating it can save hundreds of hours of research by optimizing relevant quantum circuits in a fully automated way.
Learning and Planning in Complex Action Spaces
Apr 13, 2021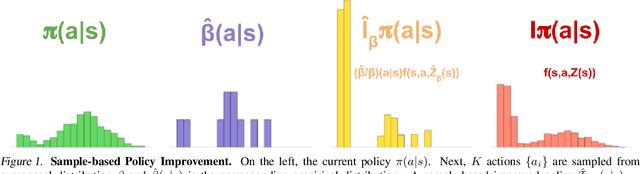
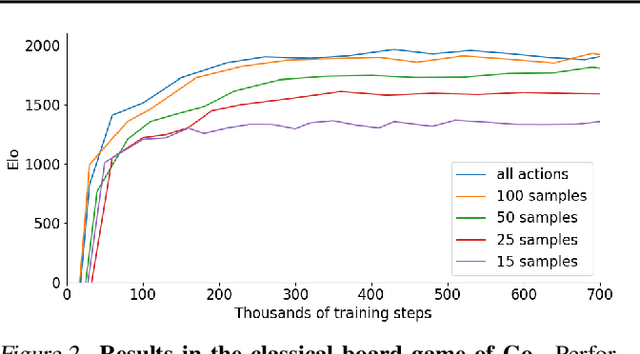
Many important real-world problems have action spaces that are high-dimensional, continuous or both, making full enumeration of all possible actions infeasible. Instead, only small subsets of actions can be sampled for the purpose of policy evaluation and improvement. In this paper, we propose a general framework to reason in a principled way about policy evaluation and improvement over such sampled action subsets. This sample-based policy iteration framework can in principle be applied to any reinforcement learning algorithm based upon policy iteration. Concretely, we propose Sampled MuZero, an extension of the MuZero algorithm that is able to learn in domains with arbitrarily complex action spaces by planning over sampled actions. We demonstrate this approach on the classical board game of Go and on two continuous control benchmark domains: DeepMind Control Suite and Real-World RL Suite.
Online and Offline Reinforcement Learning by Planning with a Learned Model
Apr 13, 2021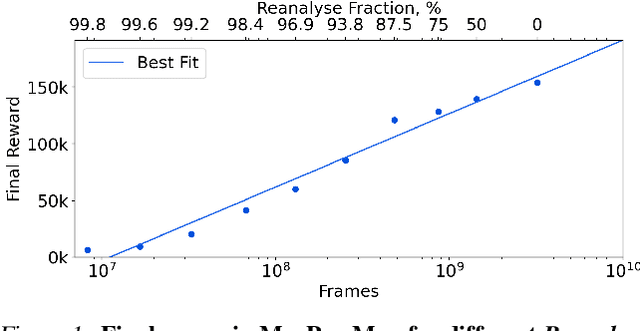
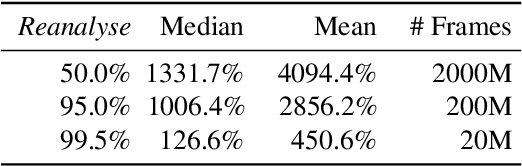
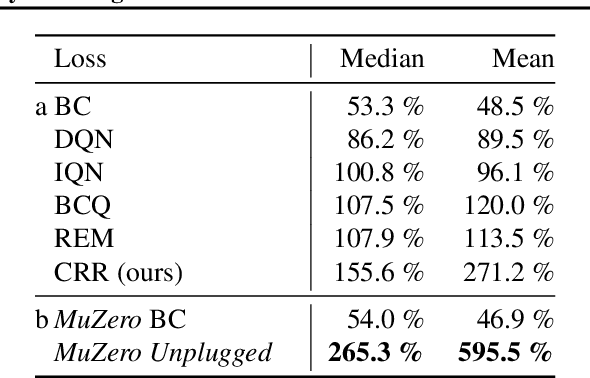
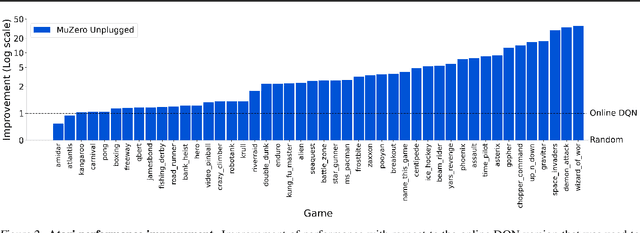
Learning efficiently from small amounts of data has long been the focus of model-based reinforcement learning, both for the online case when interacting with the environment and the offline case when learning from a fixed dataset. However, to date no single unified algorithm could demonstrate state-of-the-art results in both settings. In this work, we describe the Reanalyse algorithm which uses model-based policy and value improvement operators to compute new improved training targets on existing data points, allowing efficient learning for data budgets varying by several orders of magnitude. We further show that Reanalyse can also be used to learn entirely from demonstrations without any environment interactions, as in the case of offline Reinforcement Learning (offline RL). Combining Reanalyse with the MuZero algorithm, we introduce MuZero Unplugged, a single unified algorithm for any data budget, including offline RL. In contrast to previous work, our algorithm does not require any special adaptations for the off-policy or offline RL settings. MuZero Unplugged sets new state-of-the-art results in the RL Unplugged offline RL benchmark as well as in the online RL benchmark of Atari in the standard 200 million frame setting.
Persistent Message Passing
Mar 01, 2021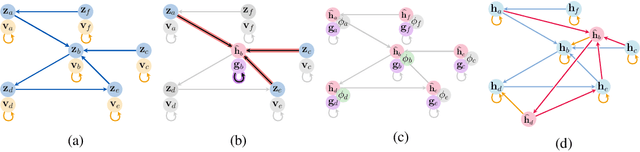
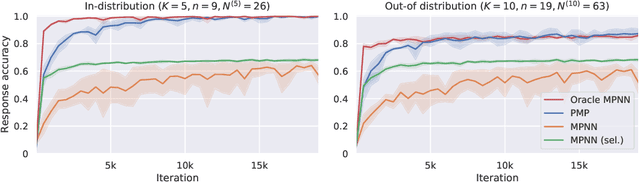
Graph neural networks (GNNs) are a powerful inductive bias for modelling algorithmic reasoning procedures and data structures. Their prowess was mainly demonstrated on tasks featuring Markovian dynamics, where querying any associated data structure depends only on its latest state. For many tasks of interest, however, it may be highly beneficial to support efficient data structure queries dependent on previous states. This requires tracking the data structure's evolution through time, placing significant pressure on the GNN's latent representations. We introduce Persistent Message Passing (PMP), a mechanism which endows GNNs with capability of querying past state by explicitly persisting it: rather than overwriting node representations, it creates new nodes whenever required. PMP generalises out-of-distribution to more than 2x larger test inputs on dynamic temporal range queries, significantly outperforming GNNs which overwrite states.
Path Planning using Neural A* Search
Sep 16, 2020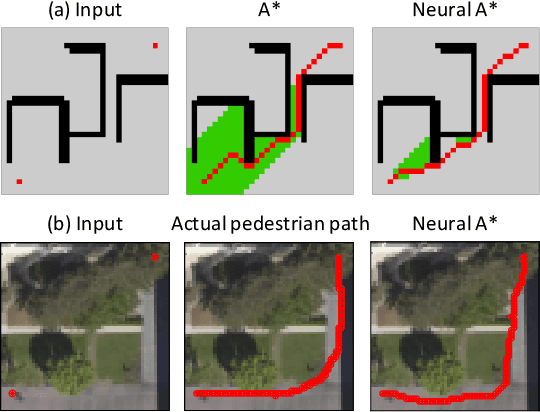
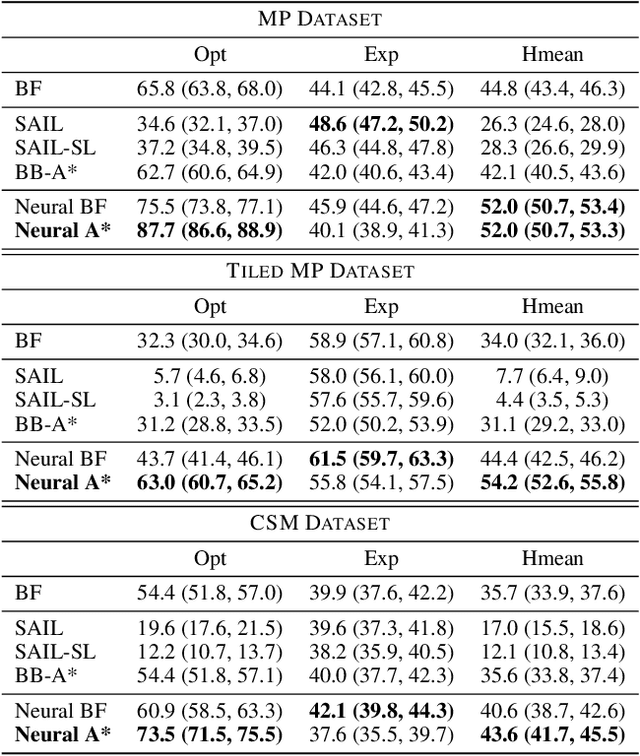


We present Neural A*, a novel data-driven search algorithm for path planning problems. Although data-driven planning has received much attention in recent years, little work has focused on how search-based methods can learn from demonstrations to plan better. In this work, we reformulate a canonical A* search algorithm to be differentiable and couple it with a convolutional encoder to form an end-to-end trainable neural network planner. Neural A* solves a path planning problem by (1) encoding a visual representation of the problem to estimate a movement cost map and (2) performing the A* search on the cost map to output a solution path. By minimizing the difference between the search results and ground-truth paths in demonstrations, the encoder learns to capture a variety of visual planning cues in input images, such as shapes of dead-end obstacles, bypasses, and shortcuts, which makes estimated cost maps informative. Our extensive experiments confirmed that Neural A* (a) outperformed state-of-the-art data-driven planners in terms of the search optimality and efficiency trade-off and (b) predicted realistic pedestrian paths by directly performing a search on raw image inputs.
MULTIPOLAR: Multi-Source Policy Aggregation for Transfer Reinforcement Learning between Diverse Environmental Dynamics
Sep 28, 2019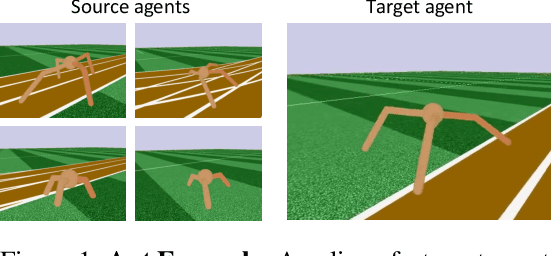
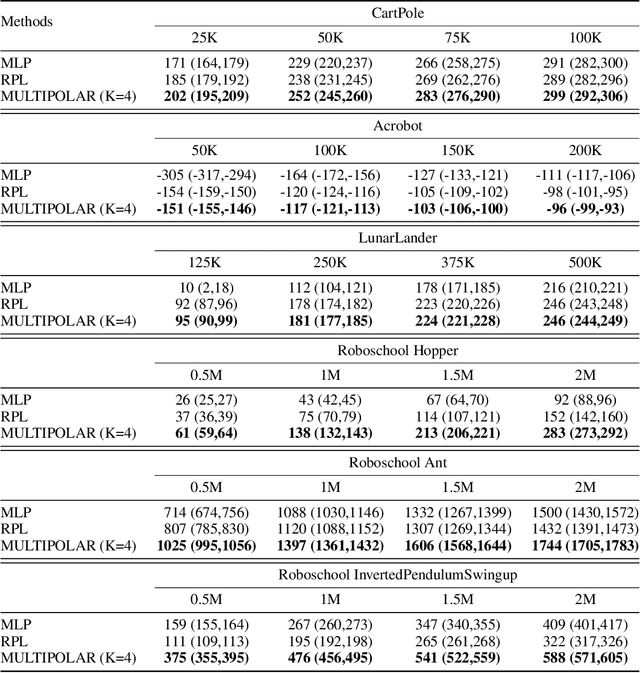
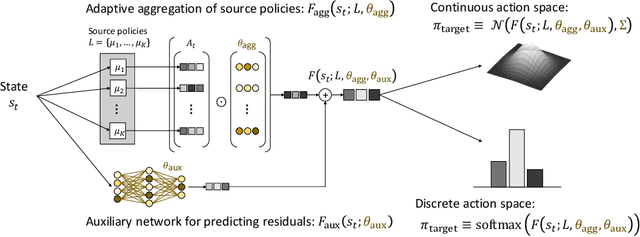

Transfer reinforcement learning (RL) aims at improving learning efficiency of an agent by exploiting knowledge from other source agents trained on relevant tasks. However, it remains challenging to transfer knowledge between different environmental dynamics without having access to the source environments. In this work, we explore a new challenge in transfer RL, where only a set of source policies collected under unknown diverse dynamics is available for learning a target task efficiently. To address this problem, the proposed approach, MULTI-source POLicy AggRegation (MULTIPOLAR), comprises two key techniques. We learn to aggregate the actions provided by the source policies adaptively to maximize the target task performance. Meanwhile, we learn an auxiliary network that predicts residuals around the aggregated actions, which ensures the target policy's expressiveness even when some of the source policies perform poorly. We demonstrated the effectiveness of MULTIPOLAR through an extensive experimental evaluation across six simulated environments ranging from classic control problems to challenging robotics simulations, under both continuous and discrete action spaces.
Machine learning for Internet of Things data analysis: A survey
Feb 17, 2018
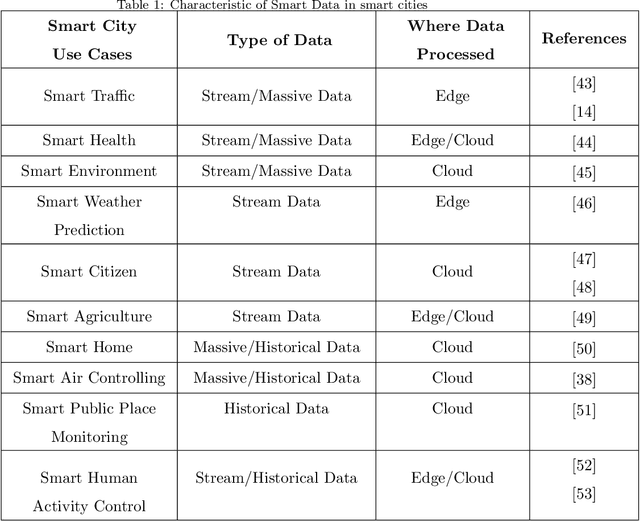
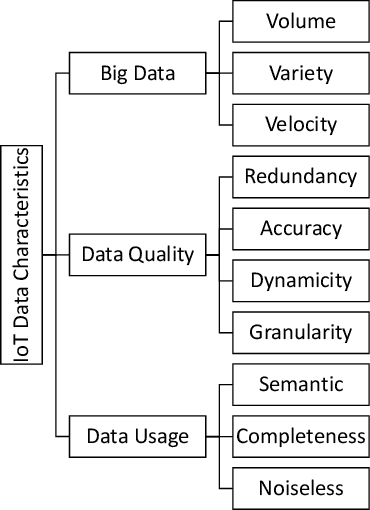
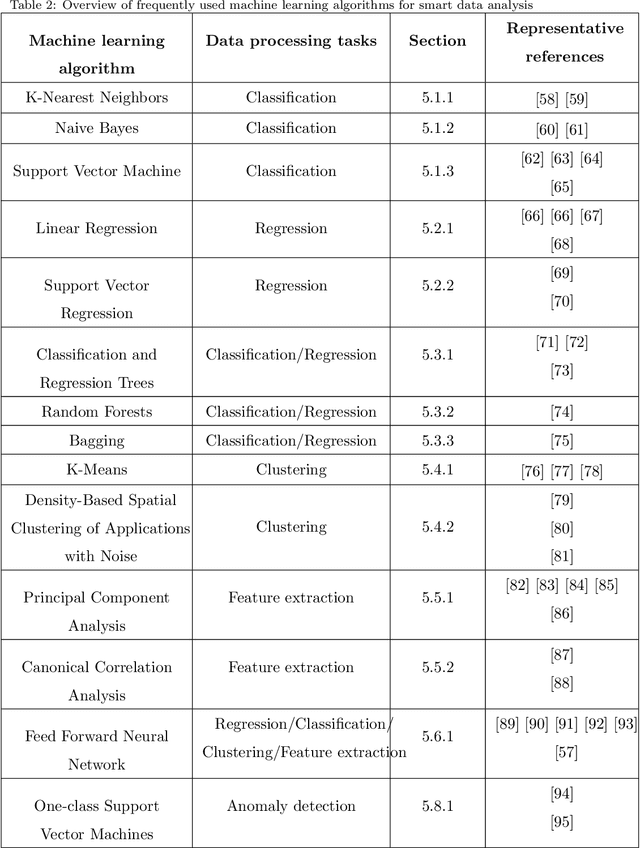
Rapid developments in hardware, software, and communication technologies have allowed the emergence of Internet-connected sensory devices that provide observation and data measurement from the physical world. By 2020, it is estimated that the total number of Internet-connected devices being used will be between 25 and 50 billion. As the numbers grow and technologies become more mature, the volume of data published will increase. Internet-connected devices technology, referred to as Internet of Things (IoT), continues to extend the current Internet by providing connectivity and interaction between the physical and cyber worlds. In addition to increased volume, the IoT generates Big Data characterized by velocity in terms of time and location dependency, with a variety of multiple modalities and varying data quality. Intelligent processing and analysis of this Big Data is the key to developing smart IoT applications. This article assesses the different machine learning methods that deal with the challenges in IoT data by considering smart cities as the main use case. The key contribution of this study is presentation of a taxonomy of machine learning algorithms explaining how different techniques are applied to the data in order to extract higher level information. The potential and challenges of machine learning for IoT data analytics will also be discussed. A use case of applying Support Vector Machine (SVM) on Aarhus Smart City traffic data is presented for a more detailed exploration.
Okutama-Action: An Aerial View Video Dataset for Concurrent Human Action Detection
Jun 15, 2017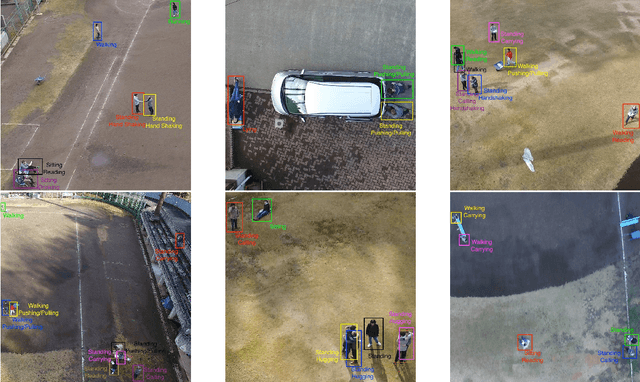
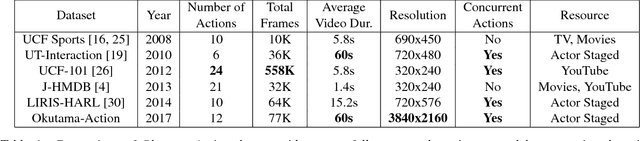
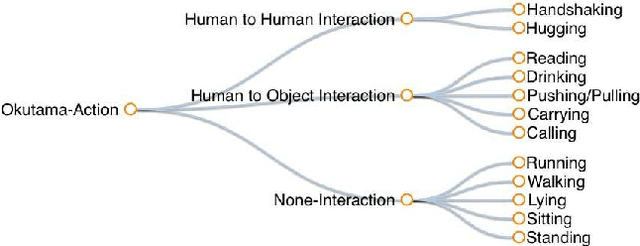
Despite significant progress in the development of human action detection datasets and algorithms, no current dataset is representative of real-world aerial view scenarios. We present Okutama-Action, a new video dataset for aerial view concurrent human action detection. It consists of 43 minute-long fully-annotated sequences with 12 action classes. Okutama-Action features many challenges missing in current datasets, including dynamic transition of actions, significant changes in scale and aspect ratio, abrupt camera movement, as well as multi-labeled actors. As a result, our dataset is more challenging than existing ones, and will help push the field forward to enable real-world applications.