 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning using Neural A* Search
Paper and Code
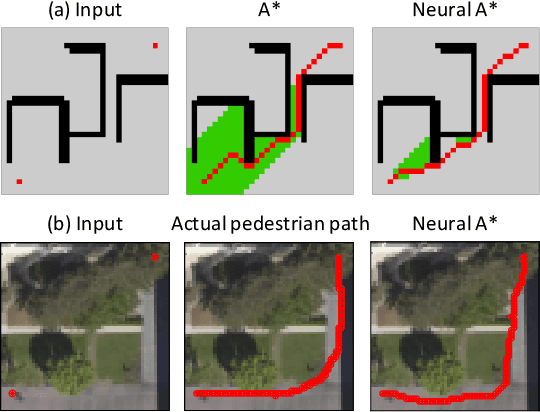
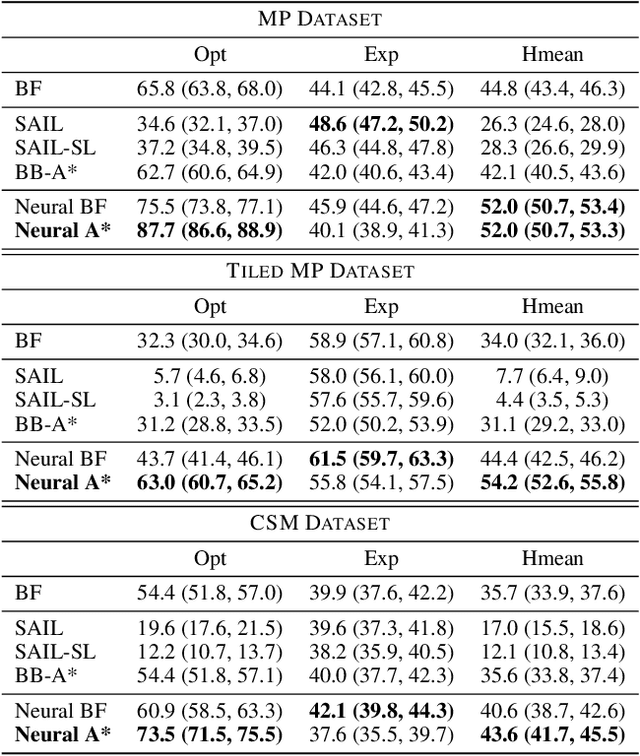


We present Neural A*, a novel data-driven search algorithm for path planning problems. Although data-driven planning has received much attention in recent years, little work has focused on how search-based methods can learn from demonstrations to plan better. In this work, we reformulate a canonical A* search algorithm to be differentiable and couple it with a convolutional encoder to form an end-to-end trainable neural network planner. Neural A* solves a path planning problem by (1) encoding a visual representation of the problem to estimate a movement cost map and (2) performing the A* search on the cost map to output a solution path. By minimizing the difference between the search results and ground-truth paths in demonstrations, the encoder learns to capture a variety of visual planning cues in input images, such as shapes of dead-end obstacles, bypasses, and shortcuts, which makes estimated cost maps informative. Our extensive experiments confirmed that Neural A* (a) outperformed state-of-the-art data-driven planners in terms of the search optimality and efficiency trade-off and (b) predicted realistic pedestrian paths by directly performing a search on raw image inputs.