 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCrystalFramer: Rethinking the Role of Frames for SE(3)-Invariant Crystal Structure Modeling
Mar 04, 2025



Crystal structure modeling with graph neural networks is essential for various applications in materials informatics, and capturing SE(3)-invariant geometric features is a fundamental requirement for these networks. A straightforward approach is to model with orientation-standardized structures through structure-aligned coordinate systems, or"frames." However, unlike molecules, determining frames for crystal structures is challenging due to their infinite and highly symmetric nature. In particular, existing methods rely on a statically fixed frame for each structure, determined solely by its structural information, regardless of the task under consideration. Here, we rethink the role of frames, questioning whether such simplistic alignment with the structure is sufficient, and propose the concept of dynamic frames. While accommodating the infinite and symmetric nature of crystals, these frames provide each atom with a dynamic view of its local environment, focusing on actively interacting atoms. We demonstrate this concept by utilizing the attention mechanism in a recent transformer-based crystal encoder, resulting in a new architecture called CrystalFramer. Extensive experiments show that CrystalFramer outperforms conventional frames and existing crystal encoders in various crystal property prediction tasks.
Deep Probabilistic Traversability with Test-time Adaptation for Uncertainty-aware Planetary Rover Navigation
Sep 01, 2024



Traversability assessment of deformable terrain is vital for safe rover navigation on planetary surfaces. Machine learning (ML) is a powerful tool for traversability prediction but faces predictive uncertainty. This uncertainty leads to prediction errors, increasing the risk of wheel slips and immobilization for planetary rovers. To address this issue, we integrate principal approaches to uncertainty handling -- quantification, exploitation, and adaptation -- into a single learning and planning framework for rover navigation. The key concept is \emph{deep probabilistic traversability}, forming the basis of an end-to-end probabilistic ML model that predicts slip distributions directly from rover traverse observations. This probabilistic model quantifies uncertainties in slip prediction and exploits them as traversability costs in path planning. Its end-to-end nature also allows adaptation of pre-trained models with in-situ traverse experience to reduce uncertainties. We perform extensive simulations in synthetic environments that pose representative uncertainties in planetary analog terrains. Experimental results show that our method achieves more robust path planning under novel environmental conditions than existing approaches.
Crystalformer: Infinitely Connected Attention for Periodic Structure Encoding
Mar 18, 2024



Predicting physical properties of materials from their crystal structures is a fundamental problem in materials science. In peripheral areas such as the prediction of molecular properties, fully connected attention networks have been shown to be successful. However, unlike these finite atom arrangements, crystal structures are infinitely repeating, periodic arrangements of atoms, whose fully connected attention results in infinitely connected attention. In this work, we show that this infinitely connected attention can lead to a computationally tractable formulation, interpreted as neural potential summation, that performs infinite interatomic potential summations in a deeply learned feature space. We then propose a simple yet effective Transformer-based encoder architecture for crystal structures called Crystalformer. Compared to an existing Transformer-based model, the proposed model requires only 29.4% of the number of parameters, with minimal modifications to the original Transformer architecture. Despite the architectural simplicity, the proposed method outperforms state-of-the-art methods for various property regression tasks on the Materials Project and JARVIS-DFT datasets.
A Transformer Model for Symbolic Regression towards Scientific Discovery
Dec 13, 2023



Symbolic Regression (SR) searches for mathematical expressions which best describe numerical datasets. This allows to circumvent interpretation issues inherent to artificial neural networks, but SR algorithms are often computationally expensive. This work proposes a new Transformer model aiming at Symbolic Regression particularly focused on its application for Scientific Discovery. We propose three encoder architectures with increasing flexibility but at the cost of column-permutation equivariance violation. Training results indicate that the most flexible architecture is required to prevent from overfitting. Once trained, we apply our best model to the SRSD datasets (Symbolic Regression for Scientific Discovery datasets) which yields state-of-the-art results using the normalized tree-based edit distance, at no extra computational cost.
Risk-aware Path Planning via Probabilistic Fusion of Traversability Prediction for Planetary Rovers on Heterogeneous Terrains
Mar 02, 2023

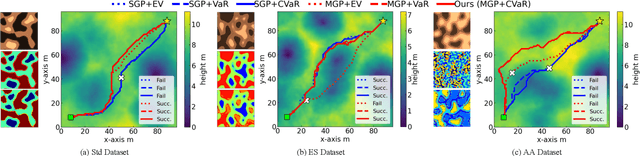

Machine learning (ML) plays a crucial role in assessing traversability for autonomous rover operations on deformable terrains but suffers from inevitable prediction errors. Especially for heterogeneous terrains where the geological features vary from place to place, erroneous traversability prediction can become more apparent, increasing the risk of unrecoverable rover's wheel slip and immobilization. In this work, we propose a new path planning algorithm that explicitly accounts for such erroneous prediction. The key idea is the probabilistic fusion of distinctive ML models for terrain type classification and slip prediction into a single distribution. This gives us a multimodal slip distribution accounting for heterogeneous terrains and further allows statistical risk assessment to be applied to derive risk-aware traversing costs for path planning. Extensive simulation experiments have demonstrated that the proposed method is able to generate more feasible paths on heterogeneous terrains compared to existing methods.
Quasistatic contact-rich manipulation via linear complementarity quadratic programming
Oct 25, 2022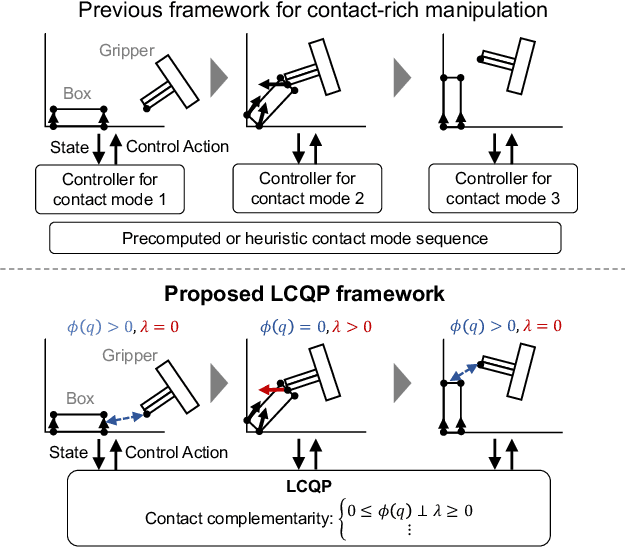
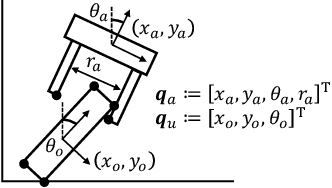
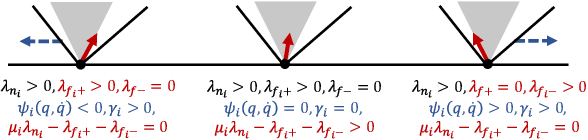
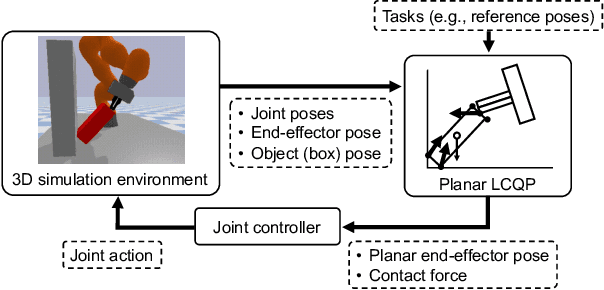
Contact-rich manipulation is challenging due to dynamically-changing physical constraints by the contact mode changes undergone during manipulation. This paper proposes a versatile local planning and control framework for contact-rich manipulation that determines the continuous control action under variable contact modes online. We model the physical characteristics of contact-rich manipulation by quasistatic dynamics and complementarity constraints. We then propose a linear complementarity quadratic program (LCQP) to efficiently determine the control action that implicitly includes the decisions on the contact modes under these constraints. In the LCQP, we relax the complementarity constraints to alleviate ill-conditioned problems that are typically caused by measure noises or model miss-matches. We conduct dynamical simulations on a 3D physical simulator and demonstrate that the proposed method can achieve various contact-rich manipulation tasks by determining the control action including the contact modes in real-time.
Rethinking Symbolic Regression Datasets and Benchmarks for Scientific Discovery
Jun 21, 2022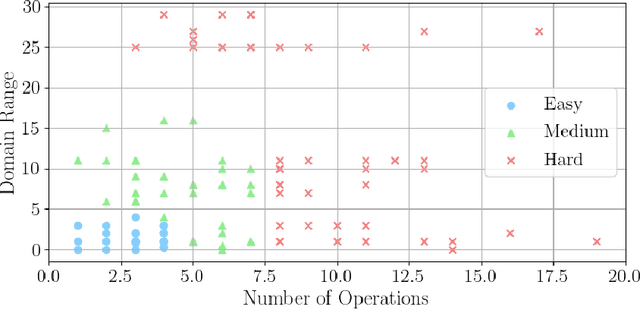
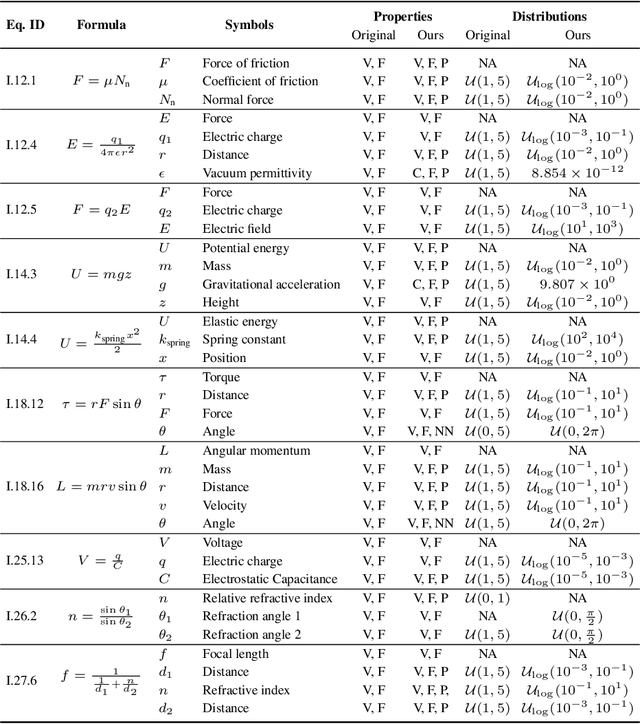
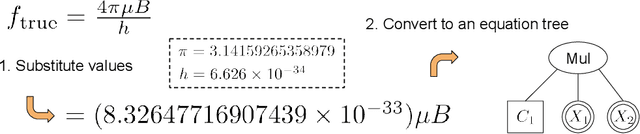

This paper revisits datasets and evaluation criteria for Symbolic Regression, a task of expressing given data using mathematical equations, specifically focused on its potential for scientific discovery. Focused on a set of formulas used in the existing datasets based on Feynman Lectures on Physics, we recreate 120 datasets to discuss the performance of symbolic regression for scientific discovery (SRSD). For each of the 120 SRSD datasets, we carefully review the properties of the formula and its variables to design reasonably realistic sampling range of values so that our new SRSD datasets can be used for evaluating the potential of SRSD such as whether or not an SR method con (re)discover physical laws from such datasets. As an evaluation metric, we also propose to use normalized edit distances between a predicted equation and the ground-truth equation trees. While existing metrics are either binary or errors between the target values and an SR model's predicted values for a given input, normalized edit distances evaluate a sort of similarity between the ground-truth and predicted equation trees. We have conducted experiments on our new SRSD datasets using five state-of-the-art SR methods in SRBench and a simple baseline based on a recent Transformer architecture. The results show that we provide a more realistic performance evaluation and open up a new machine learning-based approach for scientific discovery. Our datasets and code repository are publicly available.
Path Planning using Neural A* Search
Sep 16, 2020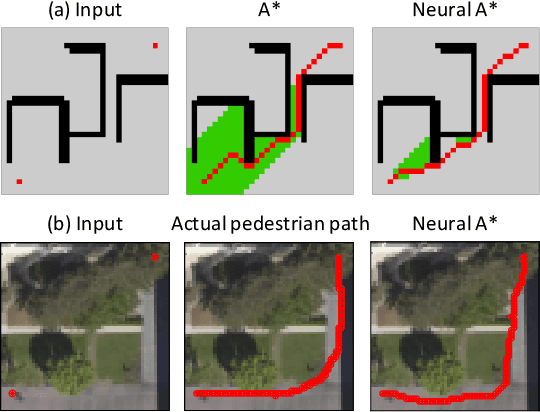
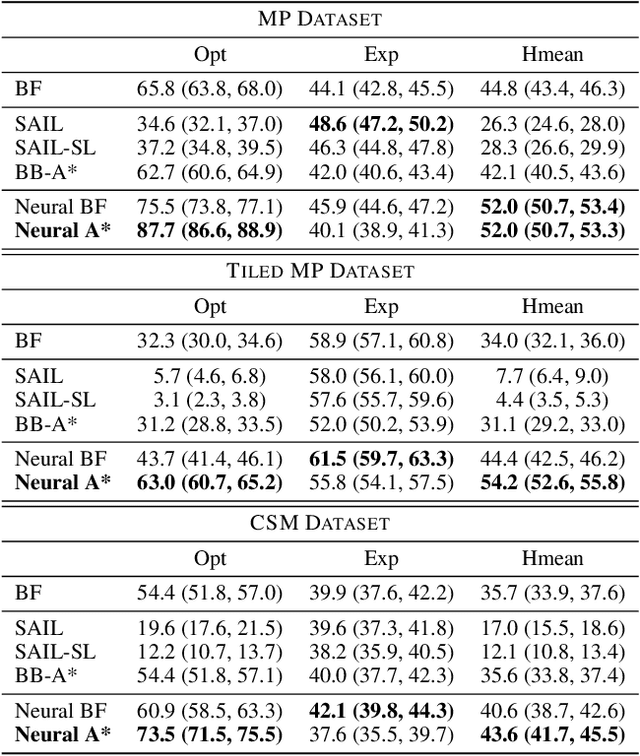


We present Neural A*, a novel data-driven search algorithm for path planning problems. Although data-driven planning has received much attention in recent years, little work has focused on how search-based methods can learn from demonstrations to plan better. In this work, we reformulate a canonical A* search algorithm to be differentiable and couple it with a convolutional encoder to form an end-to-end trainable neural network planner. Neural A* solves a path planning problem by (1) encoding a visual representation of the problem to estimate a movement cost map and (2) performing the A* search on the cost map to output a solution path. By minimizing the difference between the search results and ground-truth paths in demonstrations, the encoder learns to capture a variety of visual planning cues in input images, such as shapes of dead-end obstacles, bypasses, and shortcuts, which makes estimated cost maps informative. Our extensive experiments confirmed that Neural A* (a) outperformed state-of-the-art data-driven planners in terms of the search optimality and efficiency trade-off and (b) predicted realistic pedestrian paths by directly performing a search on raw image inputs.
Neural Inverse Rendering for General Reflectance Photometric Stereo
May 29, 2018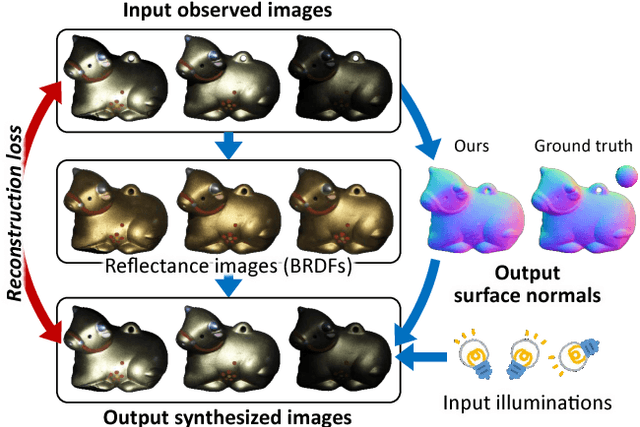
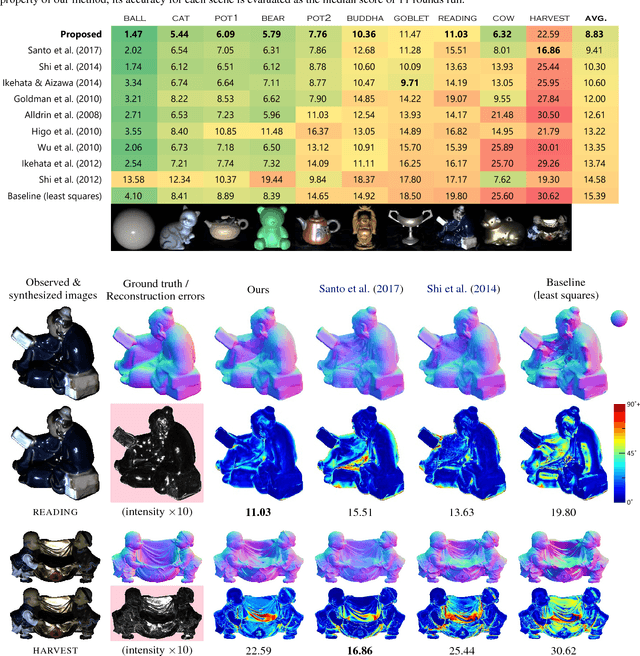
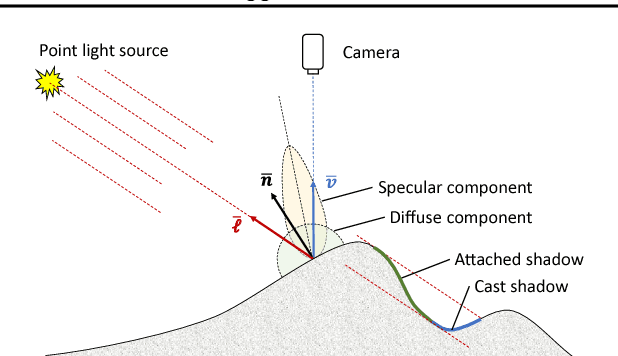
We present a novel convolutional neural network architecture for photometric stereo (Woodham, 1980), a problem of recovering 3D object surface normals from multiple images observed under varying illuminations. Despite its long history in computer vision, the problem still shows fundamental challenges for surfaces with unknown general reflectance properties (BRDFs). Leveraging deep neural networks to learn complicated reflectance models is promising, but studies in this direction are very limited due to difficulties in acquiring accurate ground truth for training and also in designing networks invariant to permutation of input images. In order to address these challenges, we propose a physics based unsupervised learning framework where surface normals and BRDFs are predicted by the network and fed into the rendering equation to synthesize observed images. The network weights are optimized during testing by minimizing reconstruction loss between observed and synthesized images. Thus, our learning process does not require ground truth normals or even pre-training on external images. Our method is shown to achieve the state-of-the-art performance on a challenging real-world scene benchmark.
Semi-Global Stereo Matching with Surface Orientation Priors
Dec 03, 2017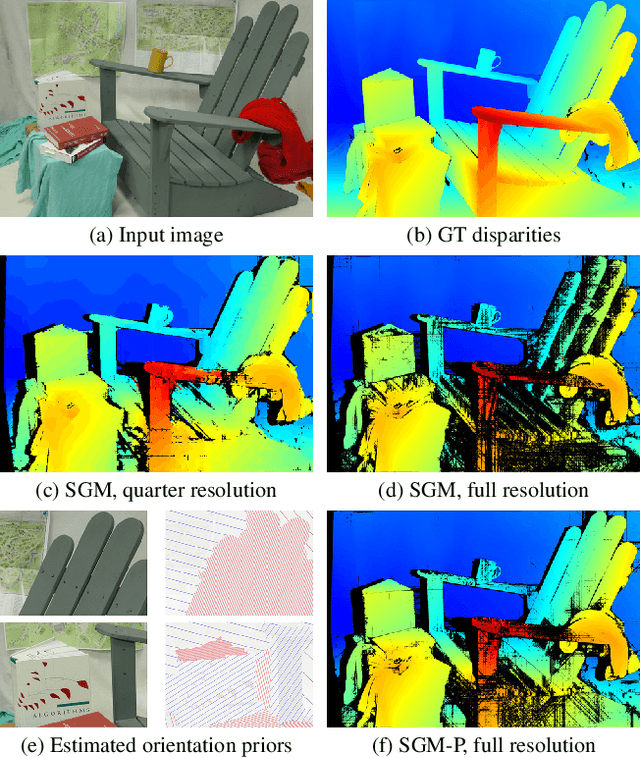
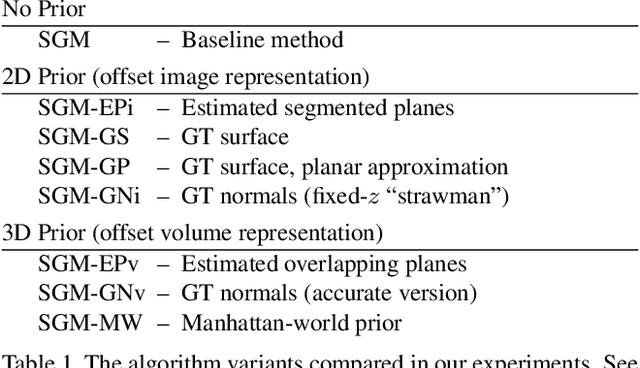
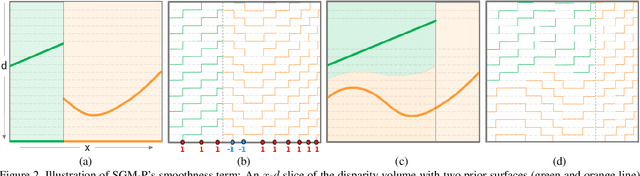
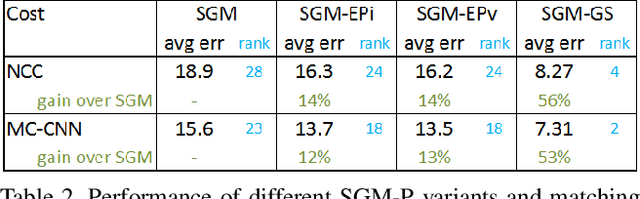
Semi-Global Matching (SGM) is a widely-used efficient stereo matching technique. It works well for textured scenes, but fails on untextured slanted surfaces due to its fronto-parallel smoothness assumption. To remedy this problem, we propose a simple extension, termed SGM-P, to utilize precomputed surface orientation priors. Such priors favor different surface slants in different 2D image regions or 3D scene regions and can be derived in various ways. In this paper we evaluate plane orientation priors derived from stereo matching at a coarser resolution and show that such priors can yield significant performance gains for difficult weakly-textured scenes. We also explore surface normal priors derived from Manhattan-world assumptions, and we analyze the potential performance gains using oracle priors derived from ground-truth data. SGM-P only adds a minor computational overhead to SGM and is an attractive alternative to more complex methods employing higher-order smoothness terms.