 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRPA-MPPI: Dynamic Repulsive Potential Augmented MPPI for Reactive Navigation in Unstructured Environments
Mar 26, 2025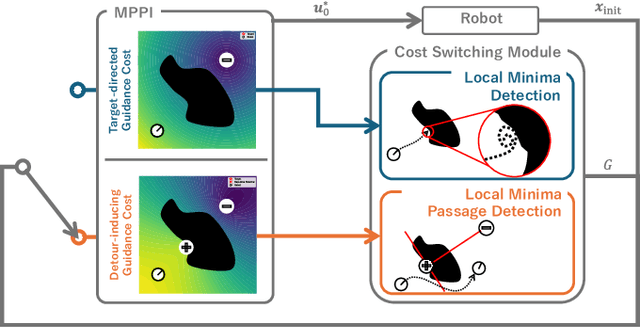


Reactive mobile robot navigation in unstructured environments is challenging when robots encounter unexpected obstacles that invalidate previously planned trajectories. Model predictive path integral control (MPPI) enables reactive planning, but still suffers from limited prediction horizons that lead to local minima traps near obstacles. Current solutions rely on heuristic cost design or scenario-specific pre-training, which often limits their adaptability to new environments. We introduce dynamic repulsive potential augmented MPPI (DRPA-MPPI), which dynamically detects potential entrapments on the predicted trajectories. Upon detecting local minima, DRPA-MPPI automatically switches between standard goal-oriented optimization and a modified cost function that generates repulsive forces away from local minima. Comprehensive testing in simulated obstacle-rich environments confirms DRPA-MPPI's superior navigation performance and safety compared to conventional methods with less computational burden.
Towards Local Minima-free Robotic Navigation: Model Predictive Path Integral Control via Repulsive Potential Augmentation
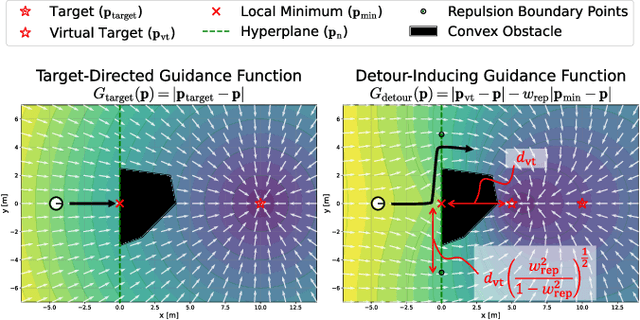
Oct 15, 2024Model-based control is a crucial component of robotic navigation. However, it often struggles with entrapment in local minima due to its inherent nature as a finite, myopic optimization procedure. Previous studies have addressed this issue but sacrificed either solution quality due to their reactive nature or computational efficiency in generating explicit paths for proactive guidance. To this end, we propose a motion planning method that proactively avoids local minima without any guidance from global paths. The key idea is repulsive potential augmentation, integrating high-level directional information into the Model Predictive Path Integral control as a single repulsive term through an artificial potential field. We evaluate our method through theoretical analysis and simulations in environments with obstacles that induce local minima. Results show that our method guarantees the avoidance of local minima and outperforms existing methods in terms of global optimality without decreasing computational efficiency.
Deep Probabilistic Traversability with Test-time Adaptation for Uncertainty-aware Planetary Rover Navigation
Sep 01, 2024



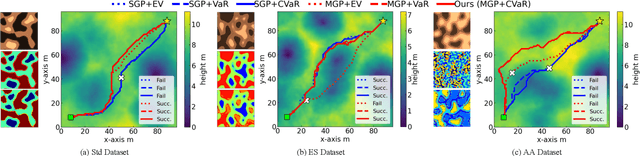
Traversability assessment of deformable terrain is vital for safe rover navigation on planetary surfaces. Machine learning (ML) is a powerful tool for traversability prediction but faces predictive uncertainty. This uncertainty leads to prediction errors, increasing the risk of wheel slips and immobilization for planetary rovers. To address this issue, we integrate principal approaches to uncertainty handling -- quantification, exploitation, and adaptation -- into a single learning and planning framework for rover navigation. The key concept is \emph{deep probabilistic traversability}, forming the basis of an end-to-end probabilistic ML model that predicts slip distributions directly from rover traverse observations. This probabilistic model quantifies uncertainties in slip prediction and exploits them as traversability costs in path planning. Its end-to-end nature also allows adaptation of pre-trained models with in-situ traverse experience to reduce uncertainties. We perform extensive simulations in synthetic environments that pose representative uncertainties in planetary analog terrains. Experimental results show that our method achieves more robust path planning under novel environmental conditions than existing approaches.
BenchNav: Simulation Platform for Benchmarking Off-road Navigation Algorithms with Probabilistic Traversability
May 22, 2024As robotic navigation techniques in perception and planning advance, mobile robots increasingly venture into off-road environments involving complex traversability. However, selecting suitable planning methods remains a challenge due to their algorithmic diversity, as each offers unique benefits. To aid in algorithm design, we introduce BenchNav, an open-source PyTorch-based simulation platform for benchmarking off-road navigation with uncertain traversability. Built upon Gymnasium, BenchNav provides three key features: 1) a data generation pipeline for preparing synthetic natural environments, 2) built-in machine learning models for traversability prediction, and 3) consistent execution of path and motion planning across different algorithms. We show BenchNav's versatility through simulation examples in off-road environments, employing three representative planning algorithms from different domains. https://github.com/masafumiendo/benchnav
Perception-and-Energy-aware Motion Planning for UAV using Learning-based Model under Heteroscedastic Uncertainty
Sep 25, 2023



Global navigation satellite systems (GNSS) denied environments/conditions require unmanned aerial vehicles (UAVs) to energy-efficiently and reliably fly. To this end, this study presents perception-and-energy-aware motion planning for UAVs in GNSS-denied environments. The proposed planner solves the trajectory planning problem by optimizing a cost function consisting of two indices: the total energy consumption of a UAV and the perception quality of light detection and ranging (LiDAR) sensor mounted on the UAV. Before online navigation, a high-fidelity simulator acquires a flight dataset to learn energy consumption for the UAV and heteroscedastic uncertainty associated with LiDAR measurements, both as functions of the horizontal velocity of the UAV. The learned models enable the online planner to estimate energy consumption and perception quality, reducing UAV battery usage and localization errors. Simulation experiments in a photorealistic environment confirm that the proposed planner can address the trade-off between energy efficiency and perception quality under heteroscedastic uncertainty. The open-source code is released at https://gitlab.com/ReI08/perception-energy-planner.
Risk-aware Path Planning via Probabilistic Fusion of Traversability Prediction for Planetary Rovers on Heterogeneous Terrains
Mar 02, 2023


Machine learning (ML) plays a crucial role in assessing traversability for autonomous rover operations on deformable terrains but suffers from inevitable prediction errors. Especially for heterogeneous terrains where the geological features vary from place to place, erroneous traversability prediction can become more apparent, increasing the risk of unrecoverable rover's wheel slip and immobilization. In this work, we propose a new path planning algorithm that explicitly accounts for such erroneous prediction. The key idea is the probabilistic fusion of distinctive ML models for terrain type classification and slip prediction into a single distribution. This gives us a multimodal slip distribution accounting for heterogeneous terrains and further allows statistical risk assessment to be applied to derive risk-aware traversing costs for path planning. Extensive simulation experiments have demonstrated that the proposed method is able to generate more feasible paths on heterogeneous terrains compared to existing methods.