 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRPA-MPPI: Dynamic Repulsive Potential Augmented MPPI for Reactive Navigation in Unstructured Environments
Mar 26, 2025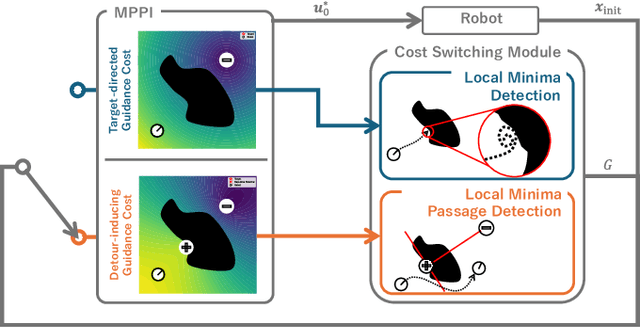
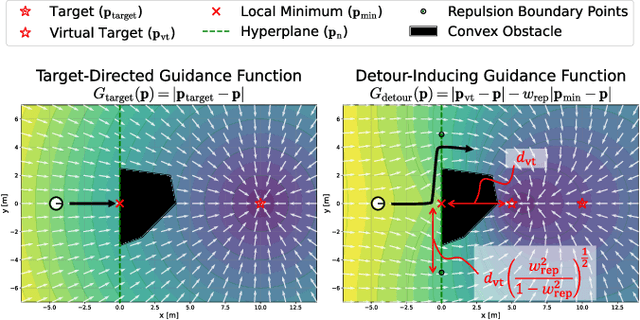


Reactive mobile robot navigation in unstructured environments is challenging when robots encounter unexpected obstacles that invalidate previously planned trajectories. Model predictive path integral control (MPPI) enables reactive planning, but still suffers from limited prediction horizons that lead to local minima traps near obstacles. Current solutions rely on heuristic cost design or scenario-specific pre-training, which often limits their adaptability to new environments. We introduce dynamic repulsive potential augmented MPPI (DRPA-MPPI), which dynamically detects potential entrapments on the predicted trajectories. Upon detecting local minima, DRPA-MPPI automatically switches between standard goal-oriented optimization and a modified cost function that generates repulsive forces away from local minima. Comprehensive testing in simulated obstacle-rich environments confirms DRPA-MPPI's superior navigation performance and safety compared to conventional methods with less computational burden.
Towards Local Minima-free Robotic Navigation: Model Predictive Path Integral Control via Repulsive Potential Augmentation
Oct 15, 2024Model-based control is a crucial component of robotic navigation. However, it often struggles with entrapment in local minima due to its inherent nature as a finite, myopic optimization procedure. Previous studies have addressed this issue but sacrificed either solution quality due to their reactive nature or computational efficiency in generating explicit paths for proactive guidance. To this end, we propose a motion planning method that proactively avoids local minima without any guidance from global paths. The key idea is repulsive potential augmentation, integrating high-level directional information into the Model Predictive Path Integral control as a single repulsive term through an artificial potential field. We evaluate our method through theoretical analysis and simulations in environments with obstacles that induce local minima. Results show that our method guarantees the avoidance of local minima and outperforms existing methods in terms of global optimality without decreasing computational efficiency.