 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVLG-Loc: Vision-Language Global Localization from Labeled Footprint Maps
Dec 18, 2025This paper presents Vision-Language Global Localization (VLG-Loc), a novel global localization method that uses human-readable labeled footprint maps containing only names and areas of distinctive visual landmarks in an environment. While humans naturally localize themselves using such maps, translating this capability to robotic systems remains highly challenging due to the difficulty of establishing correspondences between observed landmarks and those in the map without geometric and appearance details. To address this challenge, VLG-Loc leverages a vision-language model (VLM) to search the robot's multi-directional image observations for the landmarks noted in the map. The method then identifies robot poses within a Monte Carlo localization framework, where the found landmarks are used to evaluate the likelihood of each pose hypothesis. Experimental validation in simulated and real-world retail environments demonstrates superior robustness compared to existing scan-based methods, particularly under environmental changes. Further improvements are achieved through the probabilistic fusion of visual and scan-based localization.
Model Predictive Control via Probabilistic Inference: A Tutorial
Nov 11, 2025Model Predictive Control (MPC) is a fundamental framework for optimizing robot behavior over a finite future horizon. While conventional numerical optimization methods can efficiently handle simple dynamics and cost structures, they often become intractable for the nonlinear or non-differentiable systems commonly encountered in robotics. This article provides a tutorial on probabilistic inference-based MPC, presenting a unified theoretical foundation and a comprehensive overview of representative methods. Probabilistic inference-based MPC approaches, such as Model Predictive Path Integral (MPPI) control, have gained significant attention by reinterpreting optimal control as a problem of probabilistic inference. Rather than relying on gradient-based numerical optimization, these methods estimate optimal control distributions through sampling-based techniques, accommodating arbitrary cost functions and dynamics. We first derive the optimal control distribution from the standard optimal control problem, elucidating its probabilistic interpretation and key characteristics. The widely used MPPI algorithm is then derived as a practical example, followed by discussions on prior and variational distribution design, tuning principles, and theoretical aspects. This article aims to serve as a systematic guide for researchers and practitioners seeking to understand, implement, and extend these methods in robotics and beyond.
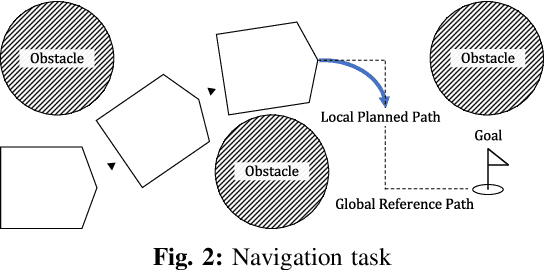
Real-Time Model Predictive Control of Vehicles with Convex-Polygon-Aware Collision Avoidance in Tight Spaces
May 08, 2025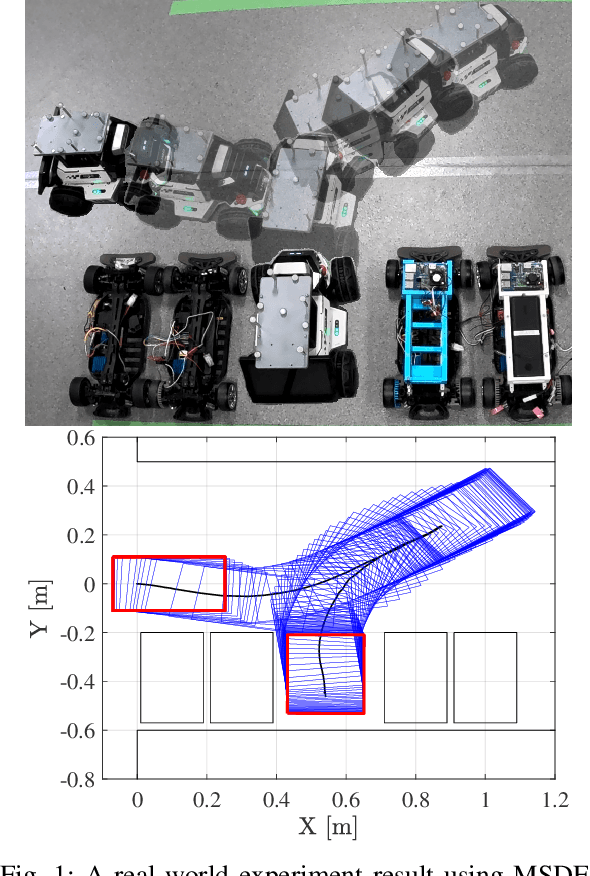
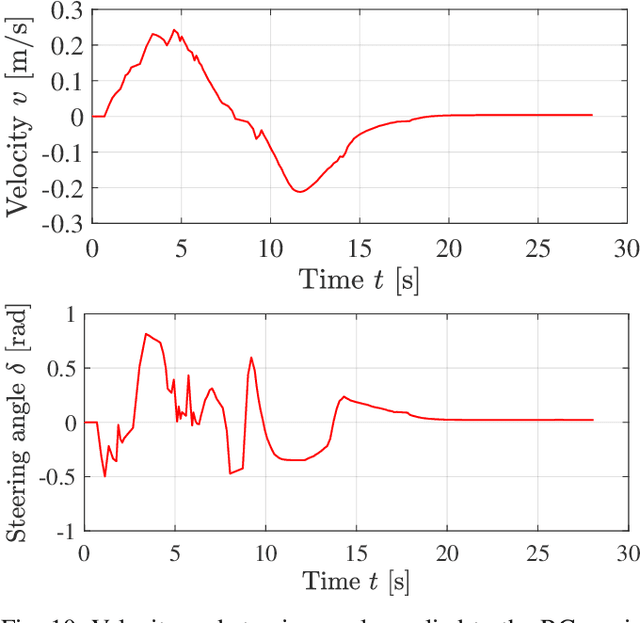
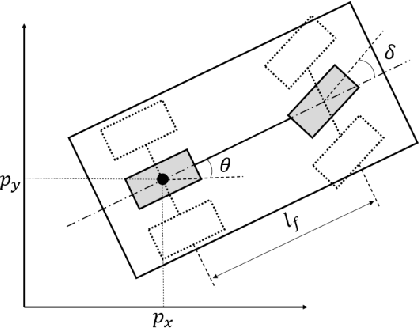
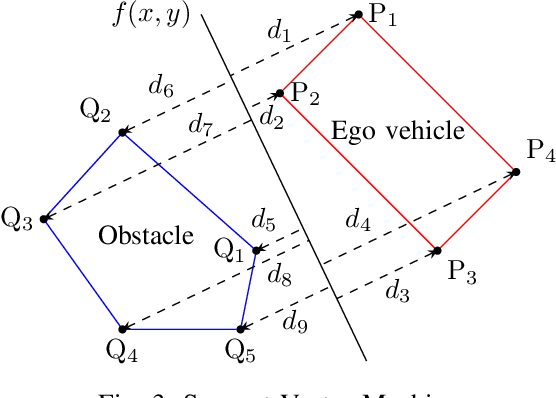
This paper proposes vehicle motion planning methods with obstacle avoidance in tight spaces by incorporating polygonal approximations of both the vehicle and obstacles into a model predictive control (MPC) framework. Representing these shapes is crucial for navigation in tight spaces to ensure accurate collision detection. However, incorporating polygonal approximations leads to disjunctive OR constraints in the MPC formulation, which require a mixed integer programming and cause significant computational cost. To overcome this, we propose two different collision-avoidance constraints that reformulate the disjunctive OR constraints as tractable conjunctive AND constraints: (1) a Support Vector Machine (SVM)-based formulation that recasts collision avoidance as a SVM optimization problem, and (2) a Minimum Signed Distance to Edges (MSDE) formulation that leverages minimum signed-distance metrics. We validate both methods through extensive simulations, including tight-space parking scenarios and varied-shape obstacle courses, as well as hardware experiments on an RC-car platform. Our results demonstrate that the SVM-based approach achieves superior navigation accuracy in constrained environments; the MSDE approach, by contrast, runs in real time with only a modest reduction in collision-avoidance performance.
LVLM-MPC Collaboration for Autonomous Driving: A Safety-Aware and Task-Scalable Control Architecture
May 08, 2025This paper proposes a novel Large Vision-Language Model (LVLM) and Model Predictive Control (MPC) integration framework that delivers both task scalability and safety for Autonomous Driving (AD). LVLMs excel at high-level task planning across diverse driving scenarios. However, since these foundation models are not specifically designed for driving and their reasoning is not consistent with the feasibility of low-level motion planning, concerns remain regarding safety and smooth task switching. This paper integrates LVLMs with MPC Builder, which automatically generates MPCs on demand, based on symbolic task commands generated by the LVLM, while ensuring optimality and safety. The generated MPCs can strongly assist the execution or rejection of LVLM-driven task switching by providing feedback on the feasibility of the given tasks and generating task-switching-aware MPCs. Our approach provides a safe, flexible, and adaptable control framework, bridging the gap between cutting-edge foundation models and reliable vehicle operation. We demonstrate the effectiveness of our approach through a simulation experiment, showing that our system can safely and effectively handle highway driving while maintaining the flexibility and adaptability of LVLMs.
DRPA-MPPI: Dynamic Repulsive Potential Augmented MPPI for Reactive Navigation in Unstructured Environments
Mar 26, 2025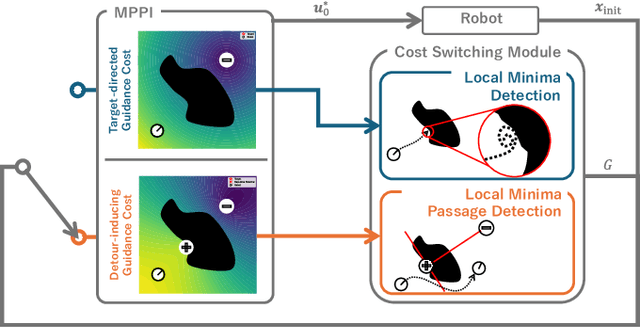


Reactive mobile robot navigation in unstructured environments is challenging when robots encounter unexpected obstacles that invalidate previously planned trajectories. Model predictive path integral control (MPPI) enables reactive planning, but still suffers from limited prediction horizons that lead to local minima traps near obstacles. Current solutions rely on heuristic cost design or scenario-specific pre-training, which often limits their adaptability to new environments. We introduce dynamic repulsive potential augmented MPPI (DRPA-MPPI), which dynamically detects potential entrapments on the predicted trajectories. Upon detecting local minima, DRPA-MPPI automatically switches between standard goal-oriented optimization and a modified cost function that generates repulsive forces away from local minima. Comprehensive testing in simulated obstacle-rich environments confirms DRPA-MPPI's superior navigation performance and safety compared to conventional methods with less computational burden.
Ground and Flight Locomotion for Two-Wheeled Drones via Model Predictive Path Integral Control
Mar 20, 2025This paper presents a novel approach to motion planning for two-wheeled drones that can drive on the ground and fly in the air. Conventional methods for two-wheeled drone motion planning typically rely on gradient-based optimization and assume that obstacle shapes can be approximated by a differentiable form. To overcome this limitation, we propose a motion planning method based on Model Predictive Path Integral (MPPI) control, enabling navigation through arbitrarily shaped obstacles by switching between driving and flight modes. To handle the instability and rapid solution changes caused by mode switching, our proposed method switches the control space and utilizes the auxiliary controller for MPPI. Our simulation results demonstrate that the proposed method enables navigation in unstructured environments and achieves effective obstacle avoidance through mode switching.
GSplatVNM: Point-of-View Synthesis for Visual Navigation Models Using Gaussian Splatting
Mar 07, 2025This paper presents a novel approach to image-goal navigation by integrating 3D Gaussian Splatting (3DGS) with Visual Navigation Models (VNMs), a method we refer to as GSplatVNM. VNMs offer a promising paradigm for image-goal navigation by guiding a robot through a sequence of point-of-view images without requiring metrical localization or environment-specific training. However, constructing a dense and traversable sequence of target viewpoints from start to goal remains a central challenge, particularly when the available image database is sparse. To address these challenges, we propose a 3DGS-based viewpoint synthesis framework for VNMs that synthesizes intermediate viewpoints to seamlessly bridge gaps in sparse data while significantly reducing storage overhead. Experimental results in a photorealistic simulator demonstrate that our approach not only enhances navigation efficiency but also exhibits robustness under varying levels of image database sparsity.
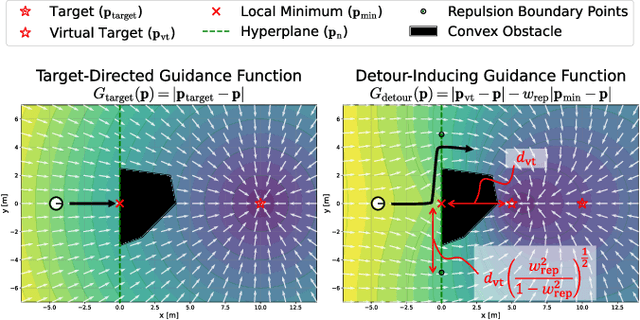
Towards Local Minima-free Robotic Navigation: Model Predictive Path Integral Control via Repulsive Potential Augmentation
Oct 15, 2024Model-based control is a crucial component of robotic navigation. However, it often struggles with entrapment in local minima due to its inherent nature as a finite, myopic optimization procedure. Previous studies have addressed this issue but sacrificed either solution quality due to their reactive nature or computational efficiency in generating explicit paths for proactive guidance. To this end, we propose a motion planning method that proactively avoids local minima without any guidance from global paths. The key idea is repulsive potential augmentation, integrating high-level directional information into the Model Predictive Path Integral control as a single repulsive term through an artificial potential field. We evaluate our method through theoretical analysis and simulations in environments with obstacles that induce local minima. Results show that our method guarantees the avoidance of local minima and outperforms existing methods in terms of global optimality without decreasing computational efficiency.
Switching Sampling Space of Model Predictive Path-Integral Controller to Balance Efficiency and Safety in 4WIDS Vehicle Navigation
Sep 13, 2024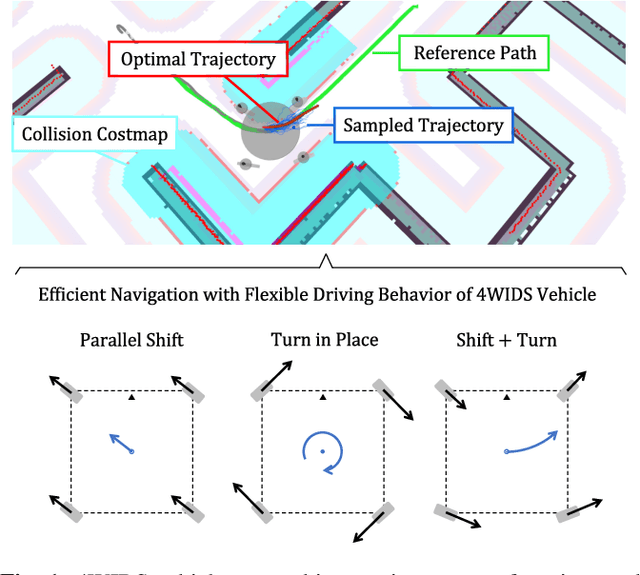
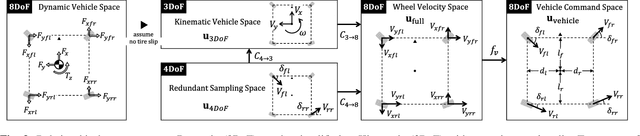
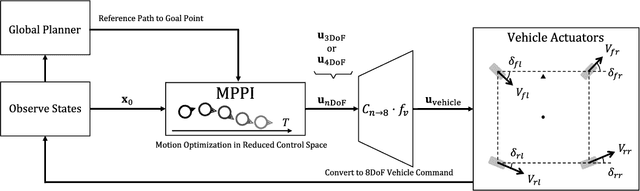
Four-wheel independent drive and steering vehicle (4WIDS Vehicle, Swerve Drive Robot) has the ability to move in any direction by its eight degrees of freedom (DoF) control inputs. Although the high maneuverability enables efficient navigation in narrow spaces, obtaining the optimal command is challenging due to the high dimension of the solution space. This paper presents a navigation architecture using the Model Predictive Path Integral (MPPI) control algorithm to avoid collisions with obstacles of any shape and reach a goal point. The key idea to make the problem easier is to explore the optimal control input in a reasonably reduced dimension that is adequate for navigation. Through evaluation in simulation, we found that selecting the sampling space of MPPI greatly affects navigation performance. In addition, our proposed controller which switches multiple sampling spaces according to the real-time situation can achieve balanced behavior between efficiency and safety. Source code is available at https://github.com/MizuhoAOKI/mppi_swerve_drive_ros
BenchNav: Simulation Platform for Benchmarking Off-road Navigation Algorithms with Probabilistic Traversability
May 22, 2024As robotic navigation techniques in perception and planning advance, mobile robots increasingly venture into off-road environments involving complex traversability. However, selecting suitable planning methods remains a challenge due to their algorithmic diversity, as each offers unique benefits. To aid in algorithm design, we introduce BenchNav, an open-source PyTorch-based simulation platform for benchmarking off-road navigation with uncertain traversability. Built upon Gymnasium, BenchNav provides three key features: 1) a data generation pipeline for preparing synthetic natural environments, 2) built-in machine learning models for traversability prediction, and 3) consistent execution of path and motion planning across different algorithms. We show BenchNav's versatility through simulation examples in off-road environments, employing three representative planning algorithms from different domains. https://github.com/masafumiendo/benchnav