 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLiDAR-Inertial Odometry Based on Extended Kalman Filter
Jul 03, 2024LiDAR-Inertial Odometry (LIO) is typically implemented using an optimization-based approach, with the factor graph often being employed due to its capability to seamlessly integrate residuals from both LiDAR and IMU measurements. Conversely, a recent study has demonstrated that accurate LIO can also be achieved using a loosely-coupled method. Inspired by this advancements, we present a novel LIO method that leverages the recursive Bayes filter, solved via the Extended Kalman Filter (EKF) - herein referred to as LIO-EKF. Within LIO-EKF, prior and likelihood distributions are computed using IMU preintegration and scan matching between LiDAR and local map point clouds, and the pose, velocity, and IMU biases are updated through the EKF process. Through experiments with the Newer College dataset, we demonstrate that LIO-EKF achieves precise trajectory tracking and mapping. Its accuracy is comparable to that of the state-of-the-art methods in both tightly- and loosely-coupled methods.
Spline-Interpolated Model Predictive Path Integral Control with Stein Variational Inference for Reactive Navigation
Apr 16, 2024



This paper presents a reactive navigation method that leverages a Model Predictive Path Integral (MPPI) control enhanced with spline interpolation for the control input sequence and Stein Variational Gradient Descent (SVGD). The MPPI framework addresses a nonlinear optimization problem by determining an optimal sequence of control inputs through a sampling-based approach. The efficacy of MPPI is significantly influenced by the sampling noise. To rapidly identify routes that circumvent large and/or newly detected obstacles, it is essential to employ high levels of sampling noise. However, such high noise levels result in jerky control input sequences, leading to non-smooth trajectories. To mitigate this issue, we propose the integration of spline interpolation within the MPPI process, enabling the generation of smooth control input sequences despite the utilization of substantial sampling noises. Nonetheless, the standard MPPI algorithm struggles in scenarios featuring multiple optimal or near-optimal solutions, such as environments with several viable obstacle avoidance paths, due to its assumption that the distribution over an optimal control input sequence can be closely approximated by a Gaussian distribution. To address this limitation, we extend our method by incorporating SVGD into the MPPI framework with spline interpolation. SVGD, rooted in the optimal transportation algorithm, possesses the unique ability to cluster samples around an optimal solution. Consequently, our approach facilitates robust reactive navigation by swiftly identifying obstacle avoidance paths while maintaining the smoothness of the control input sequences. The efficacy of our proposed method is validated on simulations with a quadrotor, demonstrating superior performance over existing baseline techniques.
Stein Variational Guided Model Predictive Path Integral Control: Proposal and Experiments with Fast Maneuvering Vehicles
Sep 20, 2023



This paper presents a novel Stochastic Optimal Control (SOC) method based on Model Predictive Path Integral control (MPPI), named Stein Variational Guided MPPI (SVG-MPPI), designed to handle rapidly shifting multimodal optimal action distributions. While MPPI can find a Gaussian-approximated optimal action distribution in closed form, i.e., without iterative solution updates, it struggles with multimodality of the optimal distributions, such as those involving non-convex constraints for obstacle avoidance. This is due to the less representative nature of the Gaussian. To overcome this limitation, our method aims to identify a target mode of the optimal distribution and guide the solution to converge to fit it. In the proposed method, the target mode is roughly estimated using a modified Stein Variational Gradient Descent (SVGD) method and embedded into the MPPI algorithm to find a closed-form "mode-seeking" solution that covers only the target mode, thus preserving the fast convergence property of MPPI. Our simulation and real-world experimental results demonstrate that SVG-MPPI outperforms both the original MPPI and other state-of-the-art sampling-based SOC algorithms in terms of path-tracking and obstacle-avoidance capabilities. Source code: https://github.com/kohonda/proj-svg_mppi
Efficient Solution to 3D-LiDAR-based Monte Carlo Localization with Fusion of Measurement Model Optimization via Importance Sampling
Mar 02, 2023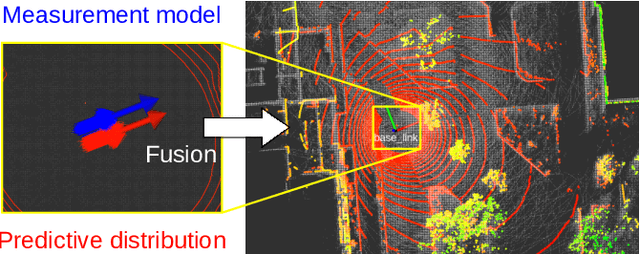
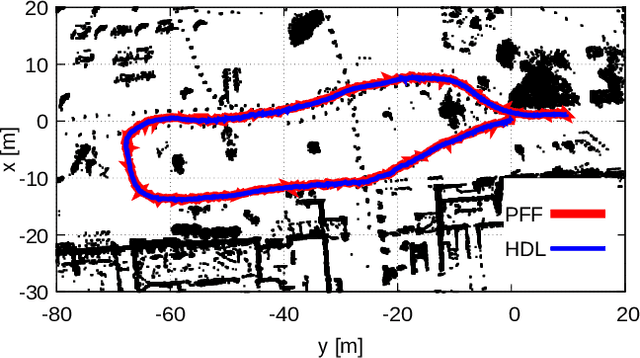
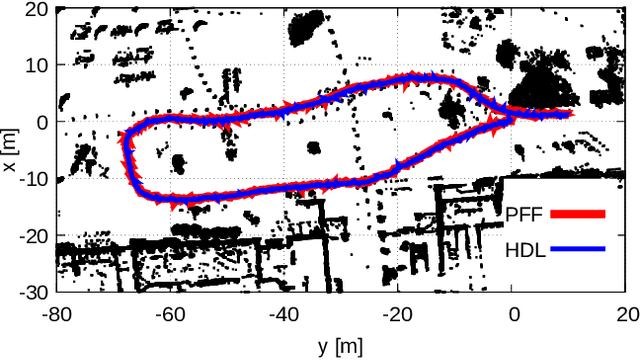
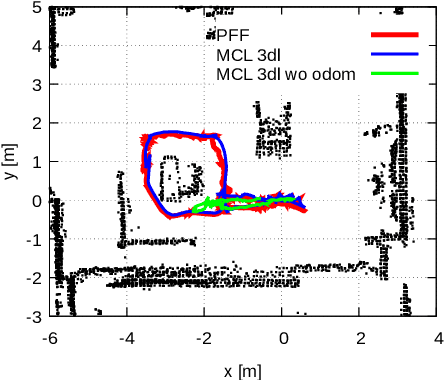
This paper presents an efficient solution to 3D-LiDAR-based Monte Carlo localization (MCL). MCL robustly works if particles are exactly sampled around the ground truth. An inertial navigation system (INS) can be used for accurate sampling, but many particles are still needed to be used for solving the 3D localization problem even if INS is available. In particular, huge number of particles are necessary if INS is not available and it makes infeasible to perform 3D MCL in terms of the computational cost. Scan matching (SM), that is optimization-based localization, efficiently works even though INS is not available because SM can ignore movement constraints of a robot and/or device in its optimization process. However, SM sometimes determines an infeasible estimate against movement. We consider that MCL and SM have complemental advantages and disadvantages and propose a fusion method of MCL and SM. Because SM is considered as optimization of a measurement model in terms of the probabilistic modeling, we perform measurement model optimization as SM. The optimization result is then used to approximate the measurement model distribution and the approximated distribution is used to sample particles. The sampled particles are fused with MCL via importance sampling. As a result, the advantages of MCL and SM can be simultaneously utilized while mitigating their disadvantages. Experiments are conducted on the KITTI dataset and other two open datasets. Results show that the presented method can be run on a single CPU thread and accurately perform localization even if INS is not available.
SLAMER: Simultaneous Localization and Map-Assisted Environment Recognition
Jul 20, 2022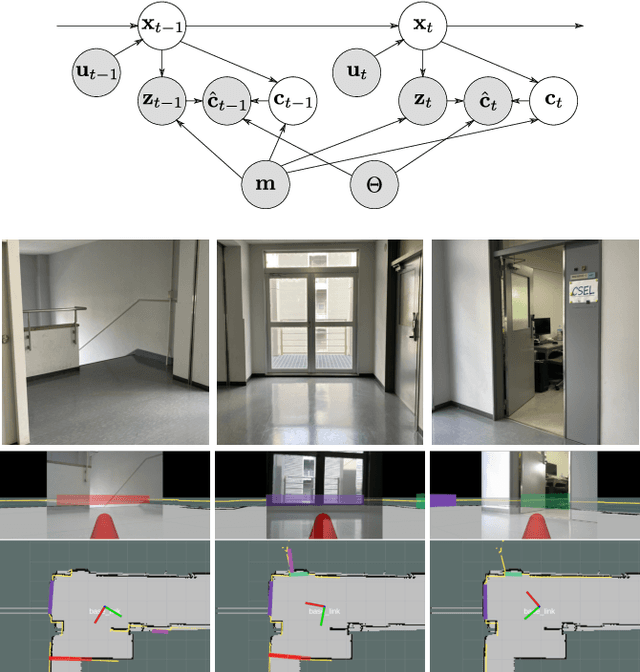
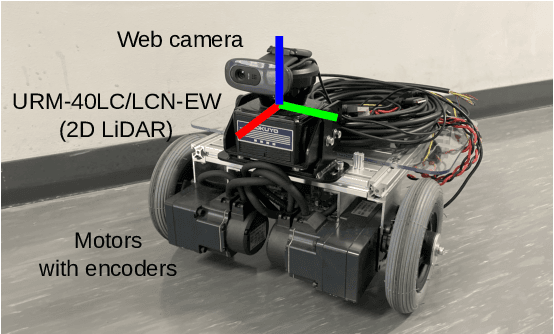
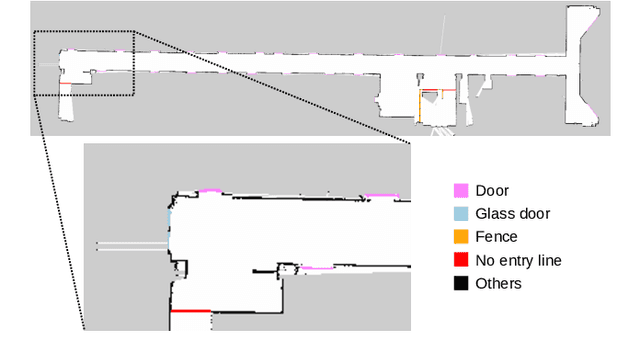
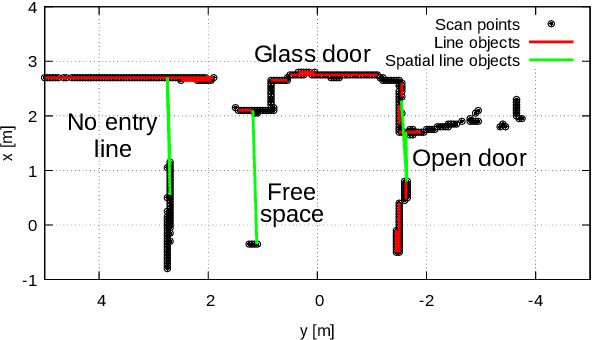
This paper presents a simultaneous localization and map-assisted environment recognition (SLAMER) method. Mobile robots usually have an environment map and environment information can be assigned to the map. Important information for mobile robots such as no entry zone can be predicted if localization has succeeded since relative pose of them can be known. However, this prediction is failed when localization does not work. Uncertainty of pose estimate must be considered for robustly using the map information. In addition, robots have external sensors and environment information can be recognized using the sensors. This on-line recognition of course contains uncertainty; however, it has to be fused with the map information for robust environment recognition since the map also contains uncertainty owing to over time. SLAMER can simultaneously cope with these uncertainties and achieves accurate localization and environment recognition. In this paper, we demonstrate LiDAR-based implementation of SLAMER in two cases. In the first case, we use the SemanticKITTI dataset and show that SLAMER achieves accurate estimate more than traditional methods. In the second case, we use an indoor mobile robot and show that unmeasurable environmental objects such as open doors and no entry lines can be recognized.
Reliable Monte Carlo Localization for Mobile Robots
May 10, 2022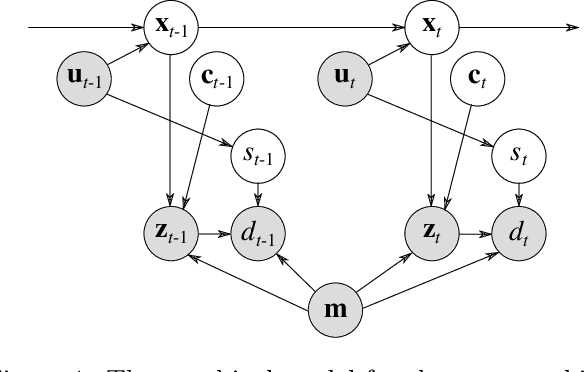
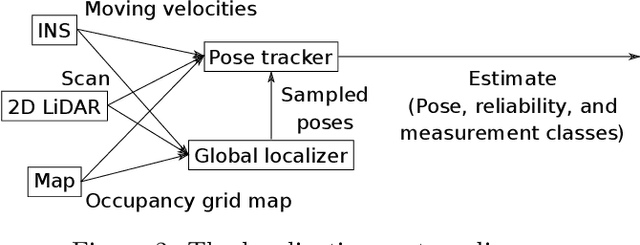
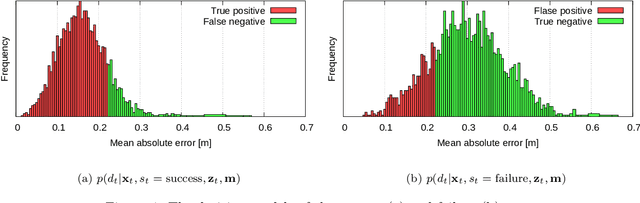
Reliability is a key factor for realizing safety guarantee of full autonomous robot systems. In this paper, we focus on reliability in mobile robot localization. Monte Carlo localization (MCL) is widely used for mobile robot localization. However, it is still difficult to guarantee its safety because there are no methods determining reliability for MCL estimate. This paper presents a novel localization framework that enables robust localization, reliability estimation, and quick re-localization, simultaneously. The presented method can be implemented using similar estimation manner to that of MCL. The method can increase localization robustness to environment changes by estimating known and unknown obstacles while performing localization; however, localization failure of course occurs by unanticipated errors. The method also includes a reliability estimation function that enables us to know whether localization has failed. Additionally, the method can seamlessly integrate a global localization method via importance sampling. Consequently, quick re-localization from failures can be realized while mitigating noisy influence of global localization. Through three types of experiments, we show that reliable MCL that performs robust localization, self-failure detection, and quick failure recovery can be realized.